基于传感器网的智能交通系统防追尾模型研究
2011-07-03李德杰
李德杰
(徐州工程学院 信电学院,徐州 221008)
0 引言
近年来,高速公路上多发汽车连环相撞的特大事故,这些案例给我们带来了沉痛的教训。分析高速公路的事故类型,大多数为追尾碰撞事故。这是因为高速公路全封闭、立体交叉、具有中央分隔带,所以车辆横向碰撞、对面相撞及撞人的事故极少,但因车速高,在恶劣天气下很容易发生制动侧滑、甩尾或行车视距不足而导致追尾碰撞事故。我们必须设法遏制追尾碰撞事故的频频发生。
美国加利福尼亚大学的学者研究发现,追尾碰撞中的半数以上都能够预防。日本学者研究指出,借助于预警使驾驶员提前制动,追尾事故数量可以减少62%,所以发展一种高速公路行驶车辆的追尾预警系统具有重要的意义。
1 防追尾预警系统概述
防追尾预警系统是一种现代信息技术和传感器技术相结合的主动安全系统,是“基于传感器网的智能交通系统”的子系统,主要用于追尾碰撞事故的警告与预防。
系统的关键是通过测距传感器测定两车的间距、相对速度和加速度等信息,因此必须正确选择距离传感器。目前常用的距离传感器有超声波测距仪、双目摄像系统测距仪、毫米波雷达测距仪及激光雷达测距仪等四种,后两种测距仪实时反应较快,故适用于在高速公路上作为测距仪。毫米波雷达测距仪及激光雷达测距仪能测出前后两车之间的实际距离及相对车速,再加上后车的车速信息及制动减速度就可以确定前后两车之间的临界安全车距。所以,为了提高信息采集的可靠性,在考虑各种传感器的综合性能的前提下,采用多传感器混合使用,同时注意传感器的选取方式以及布局,并采用多种测距方式,保证各个传感器的数据能准确地反映汽车实时的行车状况。
控制单元负责安全车距的计算和危险等级的评估。首先通过对各车道中的信息,如前车速度或减速度、后车的加速度、两车的间距及等参数及安全距离的分析建立数学模型,其次根据路面状况(干/湿)、后面车速及相对车速,计算出临界车间距离,当实测车间距接近安全临界车间距离时,报警器发出警告信号。对不同程度的跟车距离,如安全跟车、跟车距离偏小、存在追尾危险等,发出不同等级的预警。
为了更准确地描述汽车的追尾碰撞事故与行车状态的关系,在此将Petri网模型引入系统,建立Petri网模型并对模型进行分析,为系统的开发提供理论依据。
2 系统建模与分析
Petri网采用简洁的几何图形元素用直观的方法表述复杂系统,特别适合于描述动态变化、快速演化的,以及需要多次、多角度观察,或者多人协作观察的大型分布式的复杂系统行为, Petri网天然的异步并发特性,天生就是用来解决共享与协作问题的。基于Petri网的建模,能够利用计算机实现对复杂系统的可视化建模仿真,提供针对系统模型的动态特性的仿真分析平台。
2.1 系统建模的准备与假设
行车安全距离就是指在同一条车道上,同向行驶前后两车间的距离(后车车头与前车车尾间的距离),保持既不发生追尾事故,又不降低道路通行能力的适当距离。当前车减速或后车超速时,相邻两汽车就有追尾的可能。通过对各传感器监控的目标车辆进行实时监控避免汽车相撞。当然,行车安全距离受多种因素的影响,是动态变化的,可以在传感器网动态监测相关参数的前提下经过计算得出,计算模型在文献[4]中有具体描述。这样,建立对应的Petri网模型,相应的监控预警问题可以描述为Petri网标识的线性不等式约束。
一个受控Petri网可以用一个有向图表示,受控Petri网是一个五元组,形式化定义如下:Nc=(P, T, F, C, B)。其中:
P是状态库所集,是一个有限非空集P={P1,P2,…,Pm};
T是变迁集,是一个有限非空集T={T1,T2,…,Tn};可控变迁集表示为Tc:= {t ∈ T | ∃c ∈ C,(c, t) ∈ B},不可控变迁的集合表示为Tu:= T-Tc。
F是一个有向弧集,F=P×T∪T×P, P和T还满足P∪T=∅,且P∩T≠∅;
C是控制库所集;
B ⊆ (C×T)是控制库所和变迁组成的二元组的集合。
在实际图示中,库所用圆圈表示;变迁用杠表示;带箭头的直线段表示有向弧,库所与变迁之间用有向弧连接。
2.2 系统的Petri网模型
在路口或事故易发地段将每一条车道分为4个区段,每个区段为当前计算出的行车安全距离,限制每一区段只能出现一辆汽车,从而避免汽车追尾。
文献[3]讨论了不影响对象网运行的观测器的设计方法并给出了一个应用示例,
本文据此给出一条车道相邻4个区段(k-2、k-1、k和k+1)的Petri网模型,如图1所示。
网内的1个token表示一辆汽车。网内的库所排成4行4列。
每一行库所对应描述汽车通过相应区段的一种行车模式:第一行库所描述的行车模式是先加速后减速或停车;第二行库所描述的行车模式是先加速后匀速通过;第三行库所描述的行车模式是先匀速后减速或停车;第四行库所描述的行车模式是匀速驶过整个区段。
每一列库所对应描述一个区段:库所p1、p2、p3和p4对应区段k-2;库所p5、p6、p7和p8对应区段k-1;k是一个路口或事故易发地段,库所p9和p10对应区段k;库所p11和p12对应区段k+1。
变迁的激发有两个含义:一是汽车离开其输入库所对应的区段,并驶入其输出库所对应的区段;二是汽车的行车模式切换为该变迁的输出库所对应的行驶模式。
p3中有一个token的含义是:一辆汽车匀速行驶至k-2区段逐渐减速或停车。
P10中有一个token的含义是:一辆汽车匀速行驶至k区段(一个路口或事故易发地段)逐渐减速或停车。

图1 同一车道4个区段的Petri网模型
为了避免追尾,同一车道的每个区段最多出现一辆汽车,其对应的Petri网控制目标是一组广义互斥约束:要求每列库所的标识之和不超过1。
2.3 仿真试验
在Matlab/ Simulink环境下进行本模型的仿真,设计结构图如图2所示。
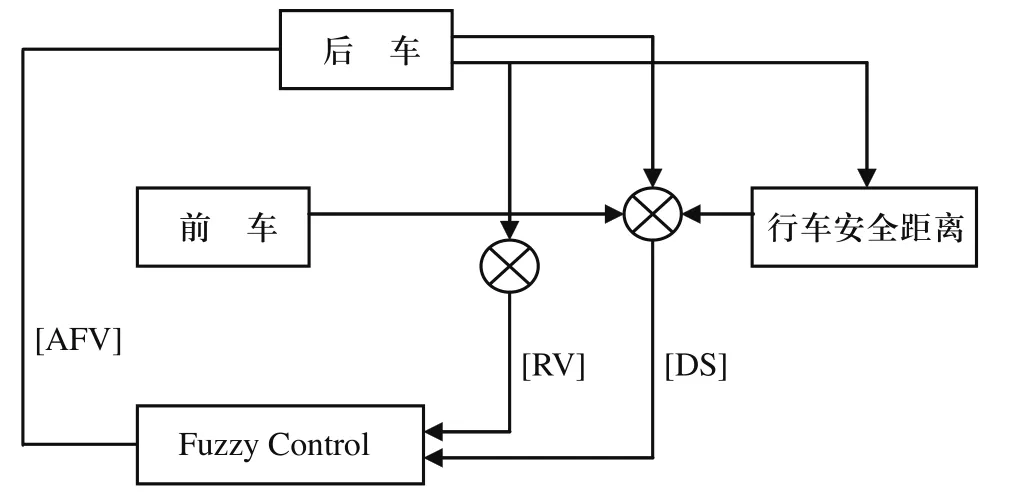
图2 仿真模型设计结构图
由仿真的结果可以得出:前车刹车制动,两车间距先是缩小,将至行车安全距离时,通过预警,后车平稳减速,两车相对速度变化不是很剧烈;当前车停车时,后车还具有一定的速度,它将继续减速至停车,并与前车保持一定的安全距离。
3 结论
本文对车辆追尾预警问题进行了研究,运用前后两车的速度差与距离差的变化情况对可能发生的追尾进行预警,建立了Petri网模型,并用Matlab进行了仿真试验。结果表明,通过预警,能有效地保证后车经过短暂的速度变化后与前车保持安全距离,避免碰撞追尾事故的发生,验证了模型的正确性。
要说明的是,模型和仿真试验都是在外界条件良好这一假设条件下完成的,没有对整个系统受外界条件影响的情况进行更深入地分析,如天气状况和驾驶员的身体精神状况等。系统还可以做以下方面的改进:提高传感器精度;缩短系统动态响应时间;提高系统工作电源的稳定性和抗干扰性;改进系统软件结构,减小系统累积误差等。
[1] M. Uzam, Synthesis of feedback control elements for discrete event systems using Petri net models and theory of regions, Int J Adv Mauf Technol, 2004, 24: 48-69.
[2] Wu Wei-min, Dong Li-da, Wang Xiao, Su Hongye, Chu Jian. Combined Petri net controller for discrete event systems. ACTA Automatica Sinica. 2003, 29, (5): 681-688.
[3] 罗继亮. Petri网的一类禁止状态问题的混合型监控器算法设计, 计算机学报, 2008, 31, (2): 291-297.
[4] 连晋毅, 华小洋.汽车防追尾碰撞数学模型研究[J], 中国公路学报, 2005, 18, (3): 123-126.
[5] 戴秋艳. 车距的模糊控制[J].贵州大学学报自然科学版增刊, 2008, (05).
[6] 申瑞玲. 车距的模糊自适应控制及其应用研究[D]. 东南大学, 2006.
[7] 陈雪梅, 高利. 基于主客观紧急度判断的车辆行驶模糊控制[J]. 中国工程科学, 2007, 9(1): 53-57.
[8] 李智安. 车辆防追尾碰撞安全系统[J]. 汽车工程师,2009, (11): 35-38.
[9] 哀崇义. Petri网原理[M]. 北京: 电子工业出版社. 1998.
