新型主动前轮转向直流电机控制系统的实现
2011-07-02向丹杨宁原健钟
向丹杨宁原健钟
(1.广东技术师范学院 自动化学院 2.华南理工大学 机械与汽车工程学院)
新型主动前轮转向直流电机控制系统的实现
向丹1,2杨宁1原健钟2
(1.广东技术师范学院 自动化学院 2.华南理工大学 机械与汽车工程学院)
本文介绍了主动转向系统的结构和工作原理,建立了主动转向系统的动力学模型,并对电机及其负载进行了数学建模,对电机系统性能进行了分析。分析结果表明:曲线符合理论分析,系统具有较好的动、静态特性,控制系统运行平稳,具有良好的运行性能。
主动前轮转向;直流电机;控制系统;仿真
1 引言
随着汽车电动助力转向系统(Electric Power Steering System,简称EPS系统)的成熟和普遍使用,主动转向技术(Active Steering System)成为当前本领域的研发热点。“主动转向”为汽车操纵和稳定性控制提供了更好的控制方法和性能,为未来自动驾驶、自动避撞和自动导航技术的发展和实现提供了可能。主动前轮转向系统(Active Front Steering ,AFS)可以通过在驾驶员转向角输入的基础上叠加附加的转向角,实现独立于驾驶员的转向干预,优化车辆对驾驶员输入的响应或在紧急情况下提高车辆的稳定性[1]。中低速时,减小转向传动比,以达到低速转向轻便灵活的要求;高速时,增大转向传动比,以提高高速转向稳定性。因此,从安全性和路感的角度而言,主动前轮转向是当前转向系统发展的一个主要趋势。
2 AFS的结构及工作原理
传统的主动前轮转向系统大多基于齿轮齿条液压转向技术,采用行星齿轮机构实现主动转向。液压助力转向机构中通过伺服机构调节液压油的输入输出,且必须对液压油进行冷却,因而系统复杂且不可避免地存在弊端。
本文在电动助力转向系统机械结构的基础上,设计了新型的主动前轮转向系统,转向管柱通过一套行星齿轮机构与主动转向电机(AFS执行器)相连。如图1所示[2],主动转向电机用来增加或者减少驾驶员施加在转向轮上的转角,实现可变传动比和对车辆稳定性的控制;原电动助力转向系统中的助力电机(EPS执行器),则根据转向盘转矩和当前车辆行驶情况,对驾驶员转向手力进行调整。因而该转向系统可通过助力电机和助转角电机,分别对转向盘转矩和前轮转角进行调节,实现主动转向。由于新的主动前轮转向系统保持了电动助力转向系统的机械连接且吸取了线控转向的长处,采取电动助力转向和附加转向叠加的形式实现了转向的主动控制,这样的系统能够获得线控转向的绝大多数优点,且没有技术和法规上的问题。该系统的主要优点[3]:① 在原来电动助力转向系统的基础上加入主动转向系统;② 可变的转向传动比;③ 结构紧凑、传动效率高;④ 便于与汽车其他主动安全系统进行集中控制。

图1 新型主动前轮转向系统控制原理图
本文所研究和设计的新型主动前轮转向系统是在原有的电动助力转向系统的基础上,将转向轴截断后在中间增加双行星齿轮机构和驱动电机,作为实施主动转向的附加装置,双行星齿轮外圈通过涡轮蜗杆机构与电机相连接,主要用于增加或者减少驾驶员施加在转向轮上的转角,但不影响原有的电动助力转向系统中的电机对转向系统提供助力,并对转向过程中的转向力矩进行调节[3]。因此,该主动前轮转向系统主要包括两部分:电动助力转向机构和带有双行星齿轮的主动转向机构,如图2所示。

图2 主动前轮转向系统
3 AFS的动力学模型
宝马公司AFS系统的基本方法是通过一个机械传动装置将电机动力控制和人对方向盘的控制复合在一起,实现两个控制的叠加。当电机驱动装置出现故障时,仍可以进行正常人工操纵,解决了主动转向的安全性问题。主动转向的机械传动装置安装在前车厢内,由于前车厢内布置十分拥挤,转向装置容易与其它零部件发生干涉,因此要求该装置设计具有尽量小的体积。由于传动装置有多个齿轮传动,存在轮齿侧隙,会影响输出轴的转动定位精度。基于上述问题,本文提出了一种新型的汽车主动转向传动装置。通过对比分析,本新型传动装置在体积上明显缩小,传动效率提高,转动定位精度改善,制造成本下降。
本文的新型主动转向传动装置与宝马公司的装置相似,但传动路线不同。基本构成包括:主动转向电机,蜗轮蜗杆传动和由两个行星排构成的双自由度行星齿轮传动,新型主动转向传动装置示意图如图3所示。输入轴4与行星架5连接,输出轴13与行星架11连接,两个太阳轮6和9为一体。方向盘与输入轴4连接构成1个自由度控制,电机3驱动蜗杆1、蜗轮2,内齿圈8构成另一个自由度控制。当电机制动时,可以操纵方向盘实现转向操纵,由输入轴4到输出轴13按传动比等于1输出。当方向盘不动时,也可以控制电机转动实现主动转向操纵。当方向盘和电机同时转动时可以实现转向的复合操纵,按需要的传动比输出。蜗轮也可以装在内齿圈12上,即输入轴和输出轴可互换。

图3 新型主动转向传动装置示意图
根据文献[3]可知,前轮总转角的表达式为:

现在考虑从系统的动力学模型作为分析起点,转向系统提供一个输入转角作为系统的命令输入,轮胎的侧倾力和回正力矩是汽车对命令的响应输出。
系统在闭环控制下按照驾驶员的参考命令提供位置跟踪。控制器可以参考简化的动力学模型设计一个位置跟踪控制系统。电机模型可以用稳定的二阶微分方程表示,系统的输入是驾驶员所要求的转向角θsw,输出是电机所要到达的位置、速度和加速度,控制器根据这些要求的量跟踪电机位置[4]。参考动力学方程为:

式中,kb为直流增益;ζ为阻尼比;nω为电机的带宽。
转向灵敏度直接影响汽车的中心操作性能。转向灵敏度定义为横向加速度相对于转向柱转角的变化率,它揭示了汽车前轮对于人输入角度的反应能力。在给定车速情况下的转向灵敏度和转向比之间的关系可以表示为:

当速度为一定值时,转向传动比的计算公式可以表示为:

式中,S是转向灵敏度,R是转向比,L是前后轮之间的轴距,Kus是转向倾斜度,g为重力加速度,u为车速。
4 主动前轮转向电机及其负载的建模
对电机进行建模与仿真是进行控制策略设计与仿真的基础,因此本文首先对主动转向电机进行分析,建立其数学模型,并对其特性进行仿真分析。
主动转向电动机的参数如表1所示。

表1 主动转向电机参数
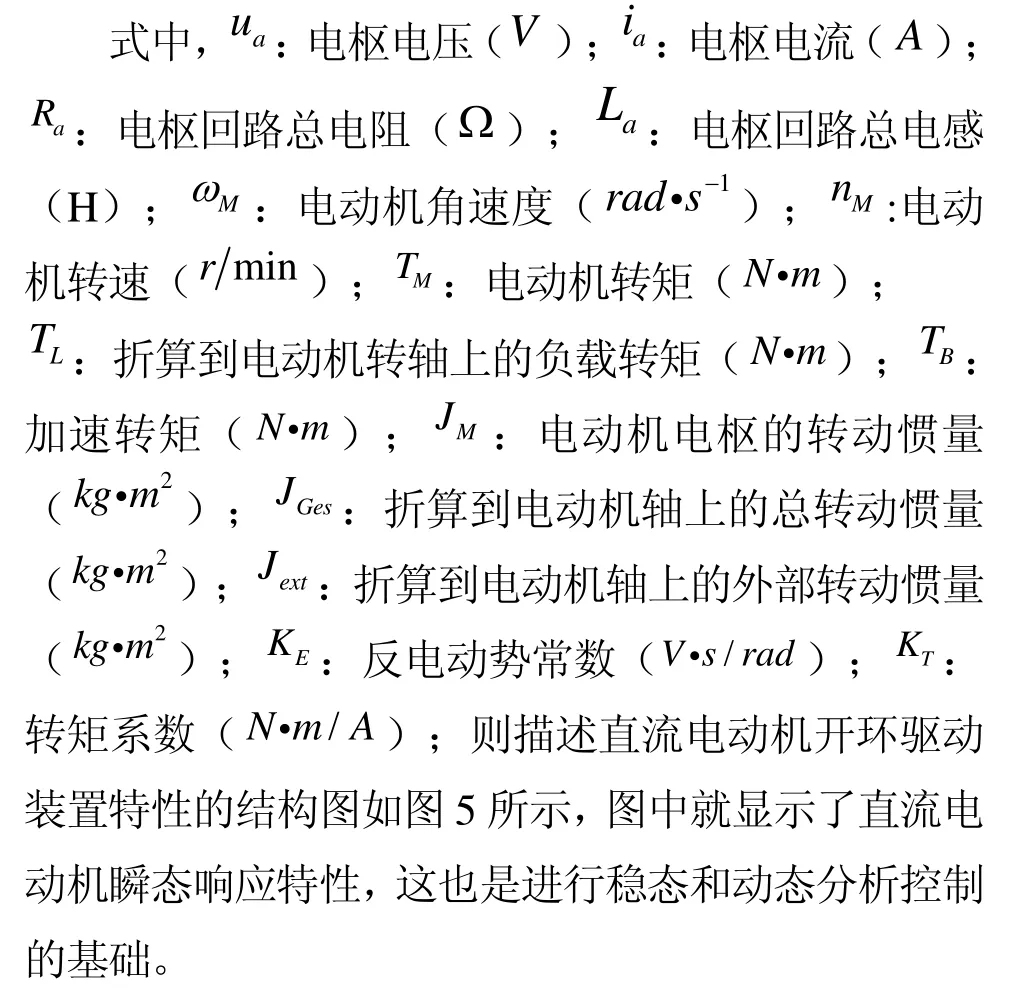
主动转向系统中的主要控制对象就是直流电动机,所以电动机的模型建立就是比较关键的一个环节。电力拖动控制系统中,直流电动机通常以电枢电压为输入量,以电动机转速为输出量。假设电机补偿良好,不计电枢反应、涡流效应和磁滞的影响,并设励磁电流恒定,图4为直流电动机的驱动装置的等效结构图。
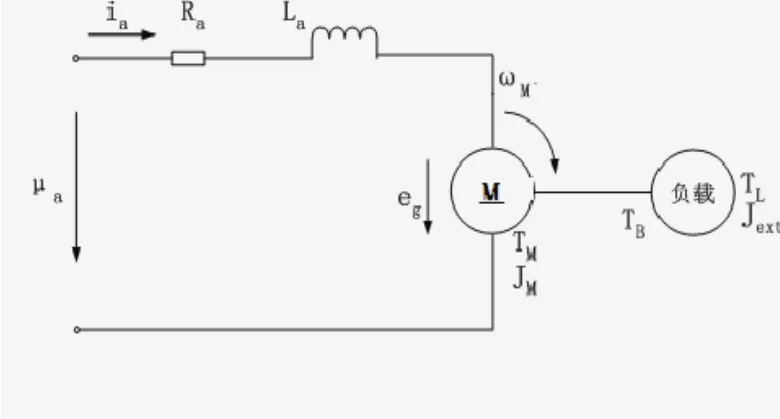
图4 直流电动机等效电路图
图4所示,在电枢控制电压ua的作用下,产生电枢电流ia,电枢线圈产生感应电动势eg,从而产生电动机的电磁转矩TM带动负载。其中:
电动机的角速度为:

由KVL定律得直流电机电枢回路电压平衡方程:

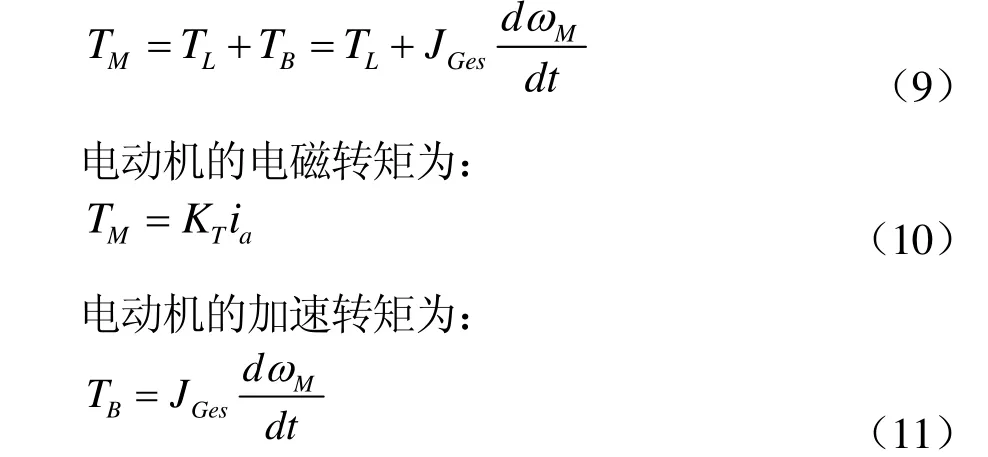
忽略粘性摩擦,根据刚体的转动定律,电动机轴上的转矩平衡方程为:
以电枢电压ua为输入,电动机转速Mω为输出的系统传递函数为:

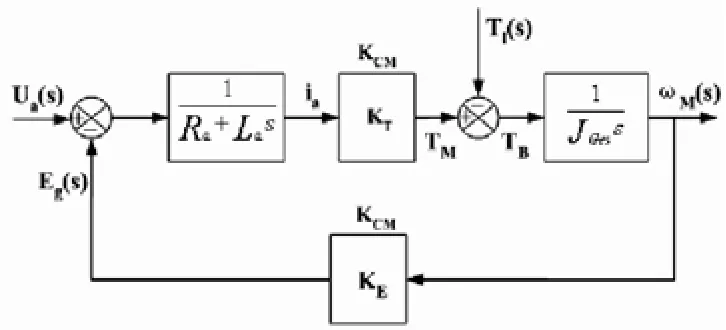
图5 直流电动机开环驱动装置特性的结构图
在这里本文引入系统的电气时间常数Te和电机的机电时间常数Tm:

根据以上直流电机的动态特性方程和己有的参数,在MATLAB/Simulink中建立了直流电动机的模型,如图6所示。电机模块中的结构图如图7所示。

图6直流电机在Simulink中的模型
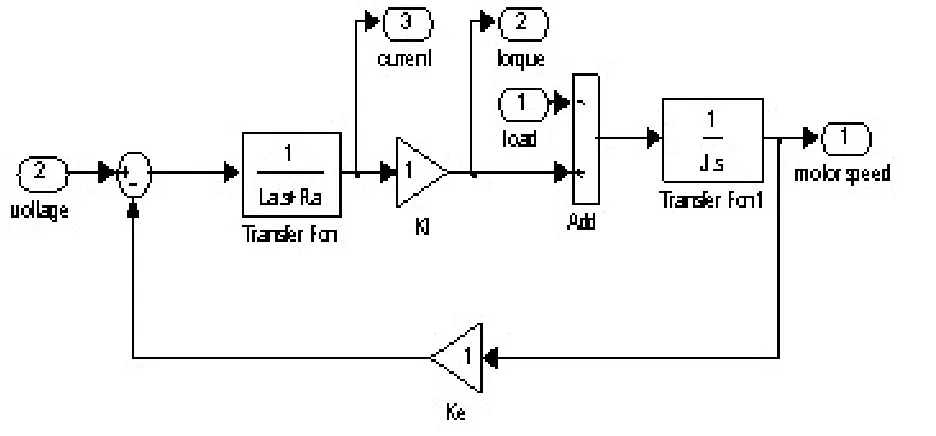
图7 直流电机的具体模型
5 电机系统性能分析
为进一步加深对不同控制策略和控制算法下控制系统的研究,必须首先研究电机系统的相关特性,可以从以上的推导和实验过程得到其转移函数,进而分析其行为和稳定性。
5.1 电机系统的机械特性
电机的机械特性是指电机在额定情况及未串联任何电阻的情况下,转速与电磁转矩的关系,它反映了在不同转速下电机所能提供的力矩的大小。
由式(11)~式(14)可以得出:

电机在不同电枢电压下的转速-转矩特性曲线如图8所示。
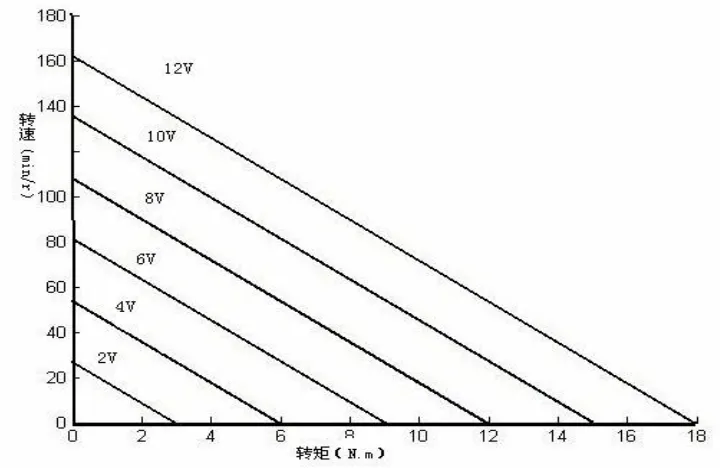
图8 转速-转矩特性曲线
问题的关键就是设计出主动转向电机的叠加转角与方向盘转角以及车速的关系,得出主动转向电机叠加转角表达式如下:


具体仿真曲线如图9所示。

图9 主动转向电机叠加转角—转向传动比--转向盘转角曲线
5.2 电机系统的稳定性分析
由电机系统的传递函数以及二阶传递函数的特点可得出系统的无阻尼自然频率:

该系统属于一个二阶过阻尼系统,忽略电极系统的摩擦影响,当电阻和惯性力矩增加时,系统阻尼会增大,而当电枢阻抗减少时,系统就会趋于过阻尼甚至欠阻尼。主动转向系统是一个随车速、路面状况、转向特点等进行快速变传动比和跟踪的系统,因而这刚好也就满足了主动转向系统对快速跟踪和稳定性的要求。
6 结束语
本文在分析直流电机数学模型的基础上,采用MATLAB/Simulink软件建立了直流电机控制系统的仿真模型,采用闭环控制方法对该模型进行了测试,仿真结果表明了该控制系统的合理性和有效性,为系统的设计和调试提供了重要的理论价值和实际应用价值。
[1] 冯超,邬惠乐,余志生等.汽车工程手册设计篇[M].北京:人民交通出版社,2001:601-613.
[2] 陈德玲.主动前轮转向系统的控制研究[D].上海:上海交通大学,2008.
[3] 蒋励.宝马主动转向技术概述[J].汽车技术,2006, 04:02-03.
[4] 邱明.汽车可变转向比电动助力转向系统原理与仿真[J].机电工程,2004,21(8):49.
[5] 张红党.汽车主动前轮转向系统的特性研究[D].江苏:江苏大学,2009.
DC Motor Implement of New Active Front Steering System
Xiang Dan1,2Yang Ning1Yuan Jianzhong2
(1.College of Automation,GuangDong Polytechnic Normal University 2. School of Mechanical&Automotive Engineering, South China University of Technology)
In this paper, the structure of the Active Front Steering system (AFS) is introduced. The dynamic model of AFS, and mathematical model of the motor and the load are presented. The performance of the motor system is also analyzed. The experimental results show that curves tally with the theoretical analysis, the system has good dynamic and static characteristics, the control system can exhibit an outstanding performance.
Active Front Steering; DC Motor; Control System; Simulation
向丹,女(汉族),1980年生,湖北人,副教授,博士生,研究方向为汽车电子技术。