基于ADVISOR二次开发的Plug-in HEV模糊控制研究
2011-06-29谭德荣孙静霞王兴伟
谭德荣,孙静霞,王兴伟
(山东理工大学交通与车辆工程学院,山东淄博255049)
随着社会的进步、科技的发展,面对传统汽车亟待解决的一系列问题,具有改善油耗、降低排放等优势的混合动力电动汽车(HEV)开始大范围的推广。但HEV仍依赖于石油燃料,远景并不乐观,在此基础上诞生了插电式混合动力电动汽车(PHEV)[1]。保证车辆的动力性,提高燃油经济性降低排放,并保持电池的充放电平衡,合理的能量分配控制是PHEV的关键技术。为了解决这方面问题,笔者以PHEV的设计目标为基础,提出一种PHEV最优模糊逻辑控制策略,在模糊输入方面综合考虑了电池电量、汽车驱动需求的输出转矩以及电动机转速等因素,对能量回收不足SOC下降的情况进行改进,并使用基于Simulink的电动汽车仿真软件二次开发ADVISOR进行仿真试验验证。
1 工作模式
由于插电式混合动力汽车可通过外部电网充电,其配置蓄电池的功率和能量都比普通混合动力汽车要大,纯电动行驶里程更长,可优先考虑蓄电池单独驱动车辆行驶。根据电池组SOC消耗一定值时为分界,将PHEV分为电量消耗模式和电量保持模式2种工作模式,这2种工作模式的控制策略有很大不同[2]:
1)以电能为主要能源的电量消耗模式。电池系统充满电后车辆以纯电动方式启动,蓄电池从电网获取的电能可以满足短距离内的车辆行驶需求。若大功率工况需求,继续纯电动行驶需要采用昂贵的大功率电机和电池,这样成本太高。所以采用以电能为主要能量源的混合控制策略,电机提供大部分功率,发动机提供小部分辅助功率。
2)以发动机为主的电量保持模式。当电池组能量消耗到一定程度,电池从电网获取能量不能满足车辆行驶需求,要依靠发动机与电机共同驱动。
2 Plug-in HEV最优模糊控制策略
最优模糊控制策略的制定主要针对电量保持的混合驱动模式,当PHEV车速或扭矩需求达到一定切换值,车辆即从纯电动模式切换到以发动机为主的混合驱动模式,在该模式下通常发动机工作在最优曲线上提供大部分功率,其输出扭矩和车辆行驶需求扭矩的差值依靠电机来补充,只有当电池的SOC不足以及电机的补充能力不能满足整车行驶需求时,发动机的工作点才偏离最优曲线,同时要控制SOC的平衡。根据上述由按发动机最优曲线进行动力分配和SOC平衡控制一起构成PHEV最优模糊控制策略。
2.1 发动机最优区间模糊控制
模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制[3]。ADVISOR的兼顾排放的模糊控制策略只将发动机需求扭矩和电池荷电状态SOC作为求取发动机输出转矩的依据,而没有考虑电机的效率。实际上混合动力能量二次转换的损失主要是电动机工作时的能量损失,因此控制发动机的输出扭矩时应兼顾电动机的效率[4]。根据模糊控制器设计目标,又以发动机作为主要动力源提供主要转矩,电机对剩余转矩差值进行缓冲和补偿,将模糊控制器的输入确定为:整车需求转矩与发动机工作在最优工作区间的实际转矩的差值ΔT、电池荷电状态SOC及当前电机转速Nm,模糊控制器结构如图1。

图1 模糊控制器结构Fig.1 Fuzzy controller structure
考虑到发动机的负荷特性,将输入变量需求输出转矩Trq在论域[0,1]上分为5个模糊集{较小,稍小,适中,稍大,较大}。根据电池内阻特性,将输入变量电池SOC分为5个模糊集{过低,偏低,正常,偏高,较高}。根据电机特性,将电机转速Nm分为2个模糊集{低,高}。发动机实际输出扭矩Te模糊集分为{较小,稍小,最佳,稍大,较大}5种情况,其中“最佳”表示发动机最佳转矩。模糊输入语言变量和输出语言变量均采用梯形隶属度函数,便于参数的调节,根据Matlab仿真工具箱中模糊控制输入量、输出量的隶属函数如图2[5]。

图2 发动机最优区间模糊控制输入、输出变量的隶属函数Fig.2 Fuzzy membership function of input and output parameterfor optimum interval control
在模糊推理中,与(AND)运算采用取小,蕴涵运算采用Mamdani方法,建立了50条规则,结论合成采用累加法,非模糊化则采用面积重心法。综合电机转速的因素,将模糊控制规则分2部分:当电机转速较高时,电机的负荷较高;电机转速较低时,电机的负荷较低,从而使电机有更高的效率,控制规则如表1,控制规则曲面图如图3。

表1 模糊控制规则Tab.1 Fuzzy control rules
列举几条规则说明:①如果Trq较小,同时SOC过低,且Nm高,则Te最佳转矩输出。表示请求转矩很小,且SOC很低需及时充电,这时电动机作为发电机来发电并处于高效率状态。发动机输出的转矩用于驱动行驶和驱动发电机发电;②如果Trq较大,同时SOC较高,且Nm高,则Te以最佳转矩输出。表示需求转矩较大,SOC较高,且电机处于高效率状态,可以用电动机来提供部分动力,使发动机处于最佳转矩状态。

图3 输入、输出参数的控制规则曲面Fig.3 Fuzzy controlling surface of input and output parameter
为了使模糊控制更准确,对模糊规则进行反馈调节。把实际响应和期望响应的偏差δ反馈给控制器,则控制器基于 δ((ΔT)、δ(SOC)、δ(Nm)对发动机模糊化输出做出校正,再把控制器输出所需的校正p(n)转化成施加于控制器的输出校正r(n),具体数学模型可表示为:

式中:H为过程增量模型矩阵。
把控制器的输入 δ ΔT(nt-mt)、δ SOC(ntmt)、δ Nm(nt-mt)量和期望的输出量 Te(nt-mt)+r(nt)模糊化,得到相应的模糊子集 ΔT(nt-mt)、SOC(nt-mt)、Nm(nt-mt)、T'e(nt-mt),则控制规则修改的关系矩阵为:

2.2 电池SOC平衡控制
最优曲线控制策略基本能够实现PHEV电量保持阶段的控制目标,但当制动回收的能量不足以满足电机需要提供的助力能量时,如果不使用发动机发电,就需要消耗电池本身电量,导致循环结束时电池SOC值要比循环开始时有所降低。因此,有必要制定电池SOC平衡模糊控制策略,以协助发动机最优区间控制达到更好的控制效果。
这个模糊控制单元同样采用Mamdani方法,两输入参数分别是电池电量差值SOC1和电池电量的变化量SOC2。电池电量的差值指行驶循环结束时电池电量值与电池电量目标控制值之差,它的模糊集有{偏低,正常,偏高},分别表示行驶循环结束时电池SOC值与目标控制值相比偏低、正常和偏高。电池电量的变化量指行驶循环结束时电池电量值与行驶循环开始时电池电量值之差,其模糊集有{下降,平衡,上升},分别表示行驶循环结束时与行驶循环开始时比电池SOC值有所下降、平衡和有所上升。
Tec'表示对发动机扭矩要求的调整值,Tec'的模糊集有{较小,稍小,最佳,稍大,较大},其中:“较小”表示大幅度减少发动机的输出扭矩;“稍小”表示稍微减少发动机扭矩的输出;“稍大”表示小幅度增大发动机扭矩的输出;“较大”表示大幅度增加发动机输出扭矩。利用仿真工具箱中模糊控制输出量的隶属函数,如图4。

图4 SOC平衡控制调节后输出转矩Tec'隶属度函数Fig.4 SOC balance control membership function of output parameter
电池SOC平衡控制规则表的建立,首先判断电池SOC1状态,再根据SOC2的正负状态,改变发动机的输出扭矩调节电池SOC值上升或下降,使SOC值恢复平衡。
3 模糊控制策略仿真
完成模糊逻辑控制器设计后,就可以根据ADVISOR中控制策略模块的输入输出在Matlab/Simu-link环境下搭建模糊控制策略模块(图5),将所建立的模型嵌入到ADVISOR,对ADVISOR进行二次开发[6-7]。根据发动机当前转速计算出发动机最佳转矩和最大转矩,然后把汽车需求输出转矩进行比例化,再根据需求转矩的比例化、电池SOC信号、电机转速进行模糊化处理,得到发动机实际输出转矩比例值,最后将这些转矩比例值按照对应关系通过解模糊过程转化成发动机实际输出转矩。
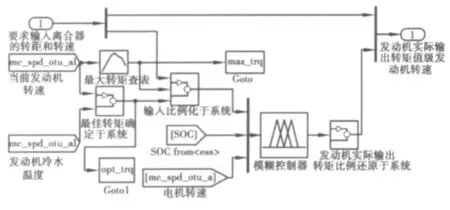
图5 模糊控制策略模块Fig.5 Fuzzy control strategy model
4 仿真结果对比
通过二次开发的ADVISOR对插电式混合动力汽车能量控制策略进行仿真[8],在北京能量回收充足工况和纽约能量回收不足工况下模拟仿真,验证PHEV最优模糊控制策略比传统电辅助控制策略的优势,以及增加SOC平衡模糊控制协助最优区间模糊控制策略达到了更优的控制效果。
4.1 增加了SOC平衡模糊控制前后性能比较
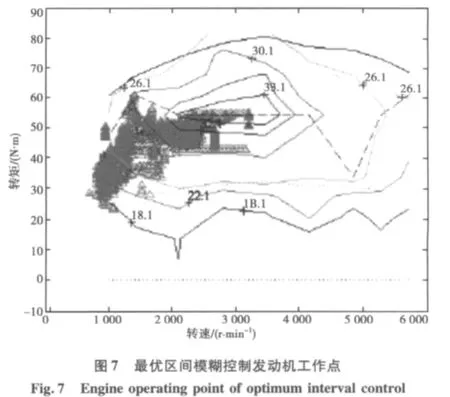
在纽约循环能量回收不足情况下,对PHEV进行仿真。在最优工作区间模糊控制下,PHEV的燃油经济性下降,且电池电量SOC处于下降状态(图6)。由于电池电量比较低,没有足够的放电能力,此时发动机首先提供外载所需能量,还要发出更多功率为电池充电,因此发动机不可避免的工作于低效率区(图7)。而增加SOC平衡模糊控制后,电池SOC虽略有降低,但变化不大,且一直处于电量充足状态(图8),能有效的辅助发动机工作于适当的工作模式,因此发动机仍能很好的工作于高效率区(图9)。

图6 电辅助控制下SOC变化Fig.6 SOC changes of electrically-assisted control


4.2 经济性分析
表2是传统电辅助控制和最优区间模糊控制2种控制策略经济性比较。从仿真结果可看出,对于北京循环的能量回收充足循环,应用模糊控制能将控制参数进行模糊化处理,实现功率的合理分配,取得较好的控制效果,相对于电辅助控制策略燃油经济性有一定改善,燃油消耗率分别下降2.1%。但对于纽约循环能量回收不充足循环,模糊控制策略与电辅助控制策略相比,燃油经济性反而下降了。

表2 两种控制策略经济性比较Tab.2 Economic comparison of two different control
经过对纽约循环这种能量回收不充足工况将模糊控制策略进行一定的调整,制定电池SOC平衡模糊控制策略。表3是在纽约循环工况下,能量回收不足时,通过电池SOC平衡控制的协助发动机最优区间控制,调整前后蓄电池效率、制动能量回收效率以及燃油消耗量变化情况,制动能量回收效率有所提高,致使燃油经济性也有大幅度提高。
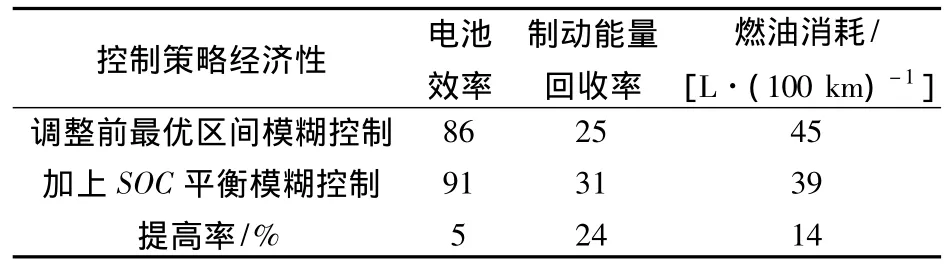
表3 纽约工况下模糊控制调整前后经济性比较Tab.3 Economic comparison of fuzzy control adjusted under NewYork Conditions
5 结语
1)PHEV控制的关键是发动机和电动机转矩的合理分配,笔者设计了一种兼顾发动机燃油经济性和电池SOC平衡的最优模糊控制策略。
2)控制策略的仿真依赖于一定的道路工况,控制策略的仿真依赖于一定的道路工况,对于能量回收充足的情况,采用发动机最优区间控制策略相对于电辅助控制策略燃油经济性有一定的改善,但对于能量回收不足的工况,需要进行改进,通过对不同的控制策略进行仿真分析,改进的最优模糊控制能将发动机控制在最佳燃油线附近,并实现电池SOC变化在合理的范围内。
3)最优模糊控制策略具有一定的鲁棒性,比基础的电力辅助控制策略在整体上更具高效性。
[1]孙逢春.电动汽车[M].北京:北京理工大学出版社,1997:243-250.
[2]毛文刚.插电式混合动力客车动力总成设计与研究[D].武汉:武汉理工大学,2009:42-47.
[3]熊祖品.并联混合动力城市客车动力系统研究与优化[D].武汉:武汉理工大学,2008:29-30.
[4]段岩波,张武高,黄震.混合动力汽车模糊逻辑控制策略仿真[J].内燃机工程,2003,24(2):66 -69.DUAN Yan-bo,ZHANG Wu-gao,HUANG Zhen.Simulation of fuzzy logic control strategy for HEV[J].Neiranji Gongcheng,2003,24(2):66 -69.
[5]吴剑.并联式混合动力汽车能量管理策略优化研究[D].济南:山东大学,2008:50-58.
[6]曾小华.基于ADVISOR 2002混合动力汽车控制策略模块开发[J].汽车工程,2004,26(4):394-396.ZENG Xiao-hua.The development of HEV control strategy module based on ADVISOR 2002 software[J].Automotive Engineering,2004,26(4):394 -396.
[7]曾小华,王庆年,李胜,等.正向仿真模型与反向软件ADVISOR的集成开发[J].汽车工程,2007,29(10):851 -854.ZENG Xiao-hua,WANG Qing-nian,LI Sheng,et al.Development of forward simulation model in ADVISOR 2002[J].Automotive Engineering,2007,29(10):851 -854.
[8]王婷.混合动力电动汽车控制策略的优化研究[D].北京:北京交通大学,2009:55-60.
