基于ADAMS 的高空作业车举升臂动力学研究
2011-06-29殷时蓉贾永清尹信贤
殷时蓉,贾永清,尹信贤
(重庆交通大学机电与汽车工程学院,重庆400074)
作业斗4在工作时需保持水平,约束方程为:
以上公式推导时用到的简记符号其中:
高空作业车按举升臂结构形式可分为:伸缩臂式、折叠臂式、混合式、垂直升降式4种类型[1]。伸缩臂式高空作业车举升臂驱动油缸的布置形式比较复杂,该类高空作业车最大作业高度可达60~80 m。折叠臂式高空作业车由其结构上的灵活性,以及可实现水平延伸、回转、易于跨越障碍物到达工作位置等特点,逐渐成为低空作业施工场合的理想作业设备。混合式高空作业车则结合了上述2种作业车的优点,扩大了作业的高度和幅度,并具有较强的跨越障碍物的能力[2]。但是,由于它比折叠臂式高空作业车的举升臂结构要复杂。垂直升降式作业幅度只限于垂直方向的施工作业。所以,在国内低空作业施工仍以折叠臂式高空作业车为主要运用形式。
以国产某型14 m高空作业车为例,该车的举升机构在结构上采用了工业机械中常用的串联机械臂的形式。工作装置采用全液压电液比例控制技术,动力部分由底盘车的取力器输出,带动液压泵为工作装置液压系统提供压力油。举升臂系统由下臂、中臂、上臂3部分组成。臂截面为箱型,采用U型梁焊接而成,考虑到举升臂在作业时应具有一定的强度和刚度的问题,所以各臂采用角钢加强筋来加强臂的抗弯能力。举升机构结构如图1,其中10与1、1与2、2与3之间采用有阻尼轴套的水平销轴铰接。
1 举升臂机构动力学方程
建立机构动力学方程的方法有牛顿-欧拉法和拉格朗日法等[3]。此处采用前一种方法建立举升臂机构的动力学模型。进行举升臂动力学推导时用到了各臂的速度及角速度矢量,应从基座(回转台)向末端执行器(作业平台)坐标系的方向依次递推计算[4]。举升机构的受力模型如图2。
1)下臂1的速度νC1,角速度ω1是下臂1在基座坐标系{xoy}的3个坐标轴[x,y,z]上的转角速度矢量,则由关节角度θ1计算得到:



由 xC1=LC1cosθ1;yC1=LC1sinθ1;zC1=0 求得的速度νC1及加速度˙νC1为:

2)中臂2的速度νC2和角速度ω2:

由 xC2=L1cosθ1+LC2C12;yC2=L1sinθ1+LC2S12;zC2=0求得的速度νC2及加速度˙νC2为:

3)上臂3的速度νC3和角速度ω3:

由 xC3= L1cosθ1+L2C12+LC3C123;yC3=L1sinθ1+L2S12- LC3S123;zC3=0求得的速度 νC3及加速度˙νC3为:
4)作业斗4的速度νC4和角速度ω4:

由 xC4=L1cosθ1+L2C12+L3C123+LC4C1234;yC4=L1sinθ1+L2S12+L3S123+LC4S1234;zC4=0 求得的速度νC4及加速度˙νC4为:


作业斗4在工作时需保持水平,约束方程为:

以上公式推导时用到的简记符号其中:

对于各臂 i(i=1、2、3、4)而言,包括如下牛顿运动方程式和欧拉运动方程式2部分:

式中:Fi-1i是臂i-1对臂i的作用力;Fi+1i是臂i+1对臂i的作用力;mi是臂i的质量;Mi-1i是臂i-1对臂i的作用力矩;Mi+1i是臂i+1对臂i的作用力矩;ri-1,Ci是旋转轴 i上的附着坐标系原点 oi-1到质心Ci的矢径;ri,Ci是旋转轴i+1附着坐标系原点oi到质心Ci的矢径;Ii是臂i相对于其质心Ci的惯性矩[5]。
在第i旋转轴上,驱动力矩的公式为:

式中:ki-1是旋转轴i的附着坐标系的zi-1轴在基座坐标系中的单位矢量。
2 建立仿真模型
串联机械臂就是由关节将刚性连杆连接在一起的连杆机构。基于制造和控制操作相对简单等方面考虑,机械臂通常只包括旋转和移动的关节[6-9]。
笔者运用多体动力学软件Adams在仿真时,根据实际作业工况,分别在各转动轴处建立旋转副约束(Revolute Joint),旋转副约束系统使其只有一个绕轴向的旋转自由度[10]。并在各旋转副上加以驱动约束(Rotational Joint Motion),由于该高空作业车在举升作业过程中采用手动切换控制,所以在建立驱动约束时采用Adams内自带函数库中的STEP函数。在作业斗中施加了举升工况下的最大载质量200 kg的向下作用力(Applied Force),模拟了高空作业车从初始位置到最大作业高度时的切换操作,系统约束方式如图3。

图3 作业臂约束方式Fig.3 Constraint method of working boom
3 仿真实验及结果
高空作业车的作业幅度和高度是由其工作臂的结构参数和运动极限状态共同确定的,在模拟仿真中该高空作业车的具体参数和仿真实验时间如表1。

表1 工作臂结构参数Tab.1 Structure parameters of working arms
通过仿真得到了作业平台的垂直方向的运动速度如图4,各臂在举升过程中的驱动力矩τi(i=1~4)变化情况如图5~图8。
高空作业车在运送工作人员到指定的位置的过程中[11],要尽可能以较短时间内运送到作业位置点,而从作业安全的角度,上升或者下降的速度不宜太快,运动速度太快给操作人员的安全感会下降,并且可能导致误操作。所以在实际的设计过程中作业平台垂直方向运动速度的控制对提高高空作业车作业效率和增加操作人员的安全性具有十分重要的意义。

图4 作业平台运动速度Fig.4 Velocity of working platform
由图4可知在高空作业车从初始状态到举升最大高度时,作业斗不是一直保持向上的运动速度,而是出现两段向下(负向)的运动,这与仿真中观察的现象相一致。向上最大速度为411.43 mm/s,向下最大速度为415.96 mm/s。


在图4所示的下臂的驱动力矩曲线中初始值为负值,是由于下臂的旋转方向为顺时针方向,与整体坐标系反向。随着举升过程的进行,质心坐标的变化,系统对下臂旋转轴的力矩发生变化。
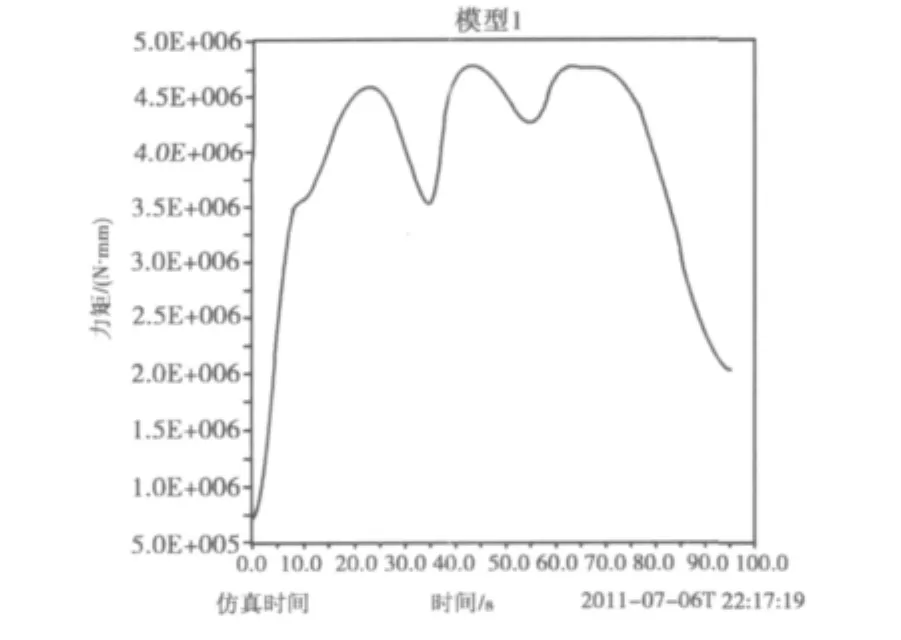
图7 上臂驱动力矩Fig.7 Driving torque of upper boom

图8 作业平台驱动力矩Fig.8 Driving torque of working platform
作业平台在举升过程中的受力和运动是最复杂的,由仿真结果可知,在举升过程中平台的驱动力矩变化幅度小于其他各工作臂的驱动力矩变化幅度。
4 结论
采用多体动力学软件ADAMS,通过对某型高空作业车的举升臂系统进行动态过程的仿真分析,得到了作业斗在工作臂举升过程中的运动速度及速度变化情况,以及各驱动关节的驱动力矩变化趋势。通过对举升执行机构的动态分析,得出各工作臂在作业过程中的动态特性,为举升机构的运动控制系统设计提供理论基础,并为该系列高空作业车举升臂系统的驱动机构选型及元件匹配提供可行的方法。
[1]徐达,蒋崇贤.专用汽车结构与设计[M].北京:北京理工大学出版社,1998:12.
[2]司景萍.专用车辆[M].北京:人民交通出版社,2007.
[3]戈新生,刘延柱.基于自然坐标的自由浮动空间机械臂动力学分析[J].力学与实践,2001,23(3):39 -42.GE Xin-sheng,LIU Yan-zhu.The dynamics analysis of flouting mechanical arm based on natural coordinate system[J].Mechanics and Practices,2001,23(3):39 -42.
[4]韩清凯,罗忠.机械系统多体动力学分析、控制与仿真[M].北京:科学出版社,2010.
[5]Matsumaru T.Design and control of the modular robot system:TOMMS[C]//Proceedings of 1995 IEEE International Conference on Robotics and Automation.Nagoya:[s.n.],1995:2125 -2131.
[6]吴洪涛,熊有伦.机械工程中的多体系统动力学问题[J].中国机械工程,2000,11(6):608 -612.WU Hong-tao,XIONG You-lun.Issue of multibody system dynamics in mechanical engineering[J].China Mechanical Engineering,2000,11(6):608 -612.
[7]Yang X H ,Yang Z F,Lu G H ,et al.A gray-encoded,hybird-accelerated genetic algorithm for global optimizations in dynamical systems[J].Communications in Nonlinear Science and Numerical Simulation,2005,10(4):355-363.
[8]Han Q K,Wen B C.External controlled synchronization motions of a hysteretic system and a duffing system with feedback[C]//6th International Conference on Vibration Engineering,Dalian:ICVE,2008:4-6.
[9]Han Q K ,Yao H L ,Sun W ,et al.FE modeling and parameter identifications of a rotor system[C]//Proceedings of the 8th International Conference on Frontiers of Design and Manufacturing,Tianjin:[s.n.],2008:23 -26.
[10]陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[11]GB/T 9465—2008高空作业车技术规范[S].北京 中国标准出版社,2008.
