基于dSPACE和PRBS的某电动缸模型辨识
2011-06-26闫飞飞石春王修敏
闫飞飞 石春 王修敏
(1.中国科学技术大学自动化系,安徽 合肥 230027;2.海军蚌埠士官学校,安徽 蚌埠 233000)
0 引言
电动缸是一种为用户提供运动及动力的执行原件,原理是电机通过丝杠把旋转运动转变为直线往返运动并将力通过推杆传给负载。在电动缸作为执行机构的控制系统中,电动缸直接由伺服驱动器控制,不再需要油、气等中间媒介传递动力,其性能不会受环境温度、易污染的液压阀和流体介质等因素影响,无需随着使用环境条件变化而做相应调整;同时系统使用220 V(单相或者三相)交流电源,电机和伺服驱动器之间的联线也非常简单,不再需要液压系统中复杂的油泵、管路、冷却系统以及其他附属设施,减少了设施投入和设备维护,节省安装空间且安装拆卸、调试方便。随着矢量控制技术的成熟,电动控制系统也具有比液压系统更优越的控制性能,所以电动缸在很多领域应用越来越广泛。
文献[1]提到电动缸在舵机中的应用;文献[2]和文献[3]介绍了电动缸在大方坯结晶器和板坯振动台结晶器的非正弦振动系统中的应用;文献[4]中通过理论分析和实用效果展现出“电驱动+电动缸”的控制系统在立体织物装备中的良好的应用前景,其文中也通过实例指出了美国近年来在工业和军事领域里由液压驱动向电驱动转变的趋势。文献[5]和[6]分别谈到了电动缸在运动仿真、测试设备和纠偏系统中应用的优势。文献[7]介绍了几种电动缸的动作原理、结构、特性和功能,并与气缸作了比较;文献[8]介绍了汽车发动机装配线上机油导管压装设备的控制系统,其以PLC为控制核心,通过调用电动缸压装程序实现压装过程;文献[9]简单介绍了电动缸在医疗器械中的应用。
电动缸一般可分为直线式电动缸和折返式电动缸。直线式电动缸中伺服电机与电动缸的传动丝杆直接相连接,结构紧凑,惯量小,轴向一致。电机和丝杆轴向平行,其整体长度短,适用于安装位置比较小的场合。电机一般选用永磁同步电机,在使用中要有变频驱动器配套使用。市场上厂家供应的电动缸及其配套软硬件,功能和操作方式大同小异,但其共同存在的问题为提供接口有限、操作方式有较大限制、控制策略较为简单,如果要做进一步的开发,比如使用电动缸作为并联多自由度平台的支腿,则对其进行模型辨识是必须进行的基础工作。
本文研究了用dSPACE系统搭建实验平台,用PRBS(伪随机二进制序列)信号作为激励信号辨识某型电动缸。
1 系统搭建
1.1 dSPACE 平台
dSPACE实时仿真系统是由德国dSPACE公司开发的一套基于MATLAB/SIMULINK的控制系统开发及半实物仿真的软硬件工作平台,实现了和MATLAB/SIMULINK/RTW的完全无缝连接[10]。dSPACE实时系统拥有实时性强,可靠性高,扩充性好等优点。dSPACE硬件系统中的处理器具有高速的计算能力,并配备了丰富的I/O支持,用户可以根据需要进行组合;软件环境的功能强大且使用方便,包括实现代码自动生成/下载和试验/调试的整套工具。dSPACE系统具有高度的集成性和模块性,允许用户根据需求来组建用户系统,无论是软件还是硬件,都提供了多项选择,目前已经成为进行快速控制原型验证和半实物仿真的首选实时平台。dSPACE系统包括硬件和软件,拥有单板系统及组件系统以及众多的I/O接口模板,可以满足大多数工程应用,其主要软件有ControlDesk等,基于图形开发界面,免去了开发人员手工编程调试的繁杂而又易于出错的工作。
1.2 电机及驱动器
本文中电动缸所用电机和驱动器为Ultract II系列永磁同步电机和AX-V系列伺服驱动器。该电机配有内置式六通道正弦光电编码器作为标准反馈装置,而驱动器面板提供电机连线端口、电源连线端口和控制端子,有两路模拟量输入口和一路模拟量输出口,通过相关参数可以设置其功能。
永磁同步电机(PMSM)的转子磁链近似恒定,故常采用转子磁链定向方法来进行控制。在基速以下恒转矩运行区,一般采用定子电流矢量位于q轴、无d轴分量的控制方式,经过一系列关系变换,控制转矩的大小实际上就转化成了控制定子电流的幅值[11]。驱动器一般提供电流、速度、位置三种控制方式,为了得到精确的动态特性和模型,我们希望从最底层做起也就是将其闭环打开,而由于矢量控制的工作原理,最内的PID环也就是电流环完全在伺服驱动器内部进行,只能闭环工作。
1.3 系统框架
系统框架结构如图1所示。用 C语言编写信号产生程序,在 MATLAB/SIMULINK中建立 RTI模型, 通 过dSPACE系统中DS1104DAC输出实际信号;激励信号通过驱动器面板提供的控制端子模拟量输入口进入驱动器内,而编码器反馈电机转速信号,通过参数设定可以在模拟量输出口得到;电源提供三相交流电给变频驱动器,外围控制线路提供开关及保护功能;使用ControlDesk软件对输入输出进行图形监视并采集数据。
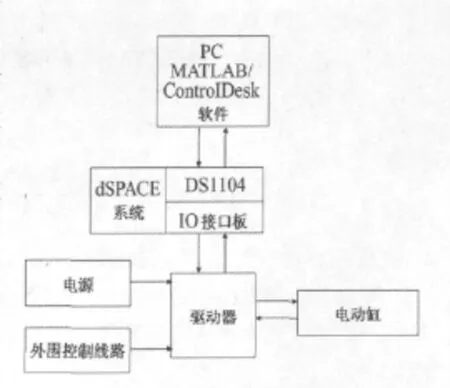
图1 系统框架结构图
2 PRBS信号参数的确定
从系统辨识的角度看,选择不同类型的输入信号会产生不同的测试精度,理论上讲白噪声是测试的最优输入信号。而在实际系统中,常以具有周期性的伪随机二进式序列(PRBS)来取代,其具有输入净扰动小、幅值、周期、时钟节拍容易控制、类似于白噪声信号的特性,本文在建模过程采用这种信号作为输入激励信号,用C语言编写信号产生程序,通过SIMULINK建立RTI模型,dSPACE设备输出实际信号。
采用PRBS信号时,将涉及如下三个性能指标参数的确定[12],下面结合电动缸实际情况进行介绍。
(1)基本单位时间Δ:为了使系统的重要模态信息受到充分激励,PRBS的有效频带应尽可能覆盖被辨识对象的主要工作频段;设被辨识系统的最高工作频率为fmax,考虑一定裕度,一般取:Δ =(0.1~0.3)×1/fmax,其中 fmax的确定主要由试验测定。一般方法是:逐渐增大输入信号的振荡频率,直到被控对象的输出幅度小至f=0时的20~200倍,此时的频率就是系统的截止频率。此方法在本试验中很难实现,故采用仿真估计的方法:先作简单的阶跃响应试验,求出粗略的传递函数,然后在MATLAB中按如上方法仿真获得系统截至频率,试验结果证明此方法是可行的。本文中 fmax=200 Hz,从而取 Δ =0.001 s。
(2)信号幅值a:研究对象电动缸及其驱动器所提供的输入口的电压限制为10V,该模拟量输入的意义由1280号参数T0_SP_REF_FAK来调整,通常为10V对应314 rad/s,即3 000 rpm,而电机额定转矩为3 200 rpm,所以用SIMULINK建立RTI模型通过DS1104DAC的输出信号的幅值也设定为10 V。本文中,实际输入的PRBS信号幅值a=10 V。
(3)序列级数n:试验时间设定为300 s,Ts=Δ=0.001 s,而Np=2n-1,综合可得n=18。
按上述方法,将得出所需要的输入信号序列。
3 辨识方法及过程
最小二乘方法是通过最小化误差的平方和找到一组数据的最佳函数匹配,在系统参数辨识和曲线拟合方面有着广泛的应用,可分为线性和非线性最小二乘法。在辨识中,通过已知的输入、输出信号以及模型的初始值即可得到新的估计参数值[12]。本文中辨识步骤如下:
(1)对于SISO线性定常系统,其数学模型为

其中,u(k)与y(k)是测量的输入输出数据序列,k=1,2,…,n+N,n为系统的阶,N为观测数据的总组数,求参数ai与bi,这是个参数估计问题。
本文实验中,数据的采样频率在ControlDesk软件建立的用户图形界面上设定为1 kHz,而PRBS序列的基本单位时间Δ=0.001 s。dSPACE设备要分别对输入和输出信号做D/A和A/D转换,将离散的数字量转换为连续模拟量以及将连续模拟量转换为离散数字量,而零阶保持器具有最小相位滞后、结构简单、易于实现等特点,一般采用零阶保持器对信号进行采样和恢复[13],所以差分方程模型带有一阶纯滞后,修正为

(2)利用测得数据,建立 N个观测方程,令θ=[a1,a2,…,an,b1,b2,…,bn]T,则有观测方程组可表达成矩阵形式

其中,y(N)=[y(n+1),y(n+2),…,y(n+N)]T,Φ(N)为观测数据矩阵,e(N)为残差向量,如N>2n,此时观测方程个数大于参数个数。
(3)最小二乘的估计准则为从模型类中,找出一个模型,在此模型中参数估计θ使模型拟合残差的平方和最小。
模型拟合残差ε(k)=y(k)-φT(k)θ
目标函数 J=εTε=yTy-2θTΦTy+θTΦTΦθ
(4)模型结构辨识
按照前面所述原理,将观测数据代入各公式,利用MATLAB软件编写辨识程序,并进行计算。对于相同的观测数据,选定不同阶次进行参数辨识,得到不同阶次下的差分方程的参数,如列表1。
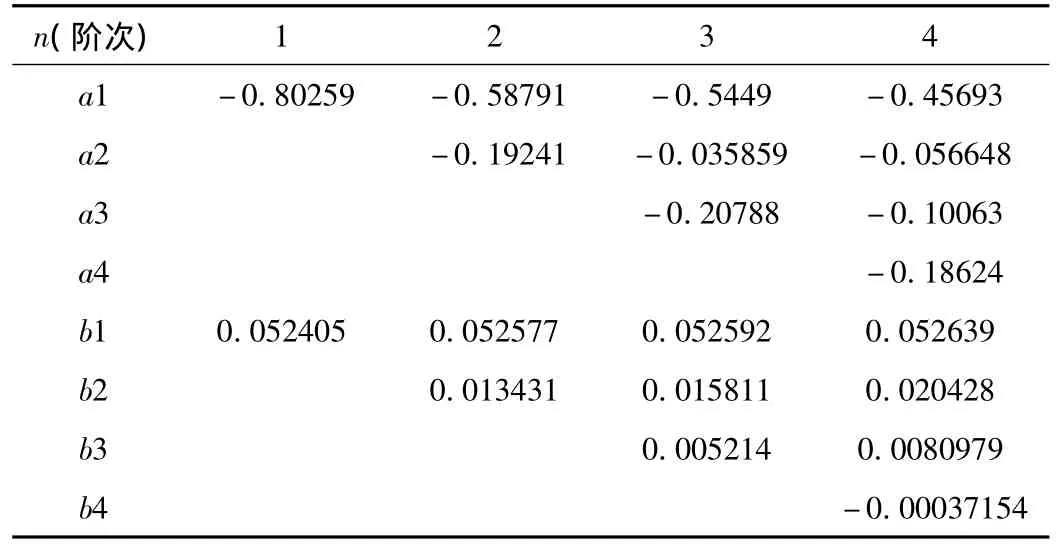
表1 不同阶次下的参数列表
为了比较不同阶次情况下,模型与观测数据间拟合的好坏程度,可以用误差性能准则函数J(n)来度量,J(n)=εTε=(y-Φθ)T(y-Φθ),式中J(n)是残差平方和,是所选定的模型阶次n的函数。当n递增时,J(n)下降。设n*为模型真实阶次,由于在n>n*后,J(n)下降不明显而趋于固定值,则J(n)曲线在n>n*处出现拐点。但在实际计算中,拐点一般不明显,要采用F检验方法。对于CAR模型,引入统计量其中f1=n2-n1,f2=N-n2,计算损失函数及统计量f值,利用F检验,可检验当阶增加时J(n)的变化是否显著。在模型辨识时,阶总是一阶阶递增的,所以有f1=1,而数据序列足够长时,f2≈N,在f2≥60以后,临界值f*变化很慢。将表1中所列参数代入计算,得到损失函数和统计量,如表2所示。
工程上一般取α=0.05,查表可见f*为3.00。从表2中可以看出,从1阶到2阶的 f值为1.6707小于3.00,则可以认为真实阶次为1阶。
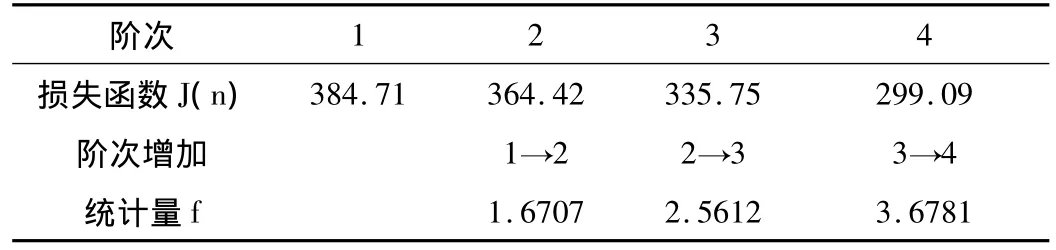
表2 损失函数J(n)和统计量f
(5)模型验证

在确定了模型以后,还需要进一步了解模型在一定的实际输入之下的输出与实际观测值之间的接近程度如何。若模型输出与观测值越近,则拟合优度越好。通常用γ2度量拟合优度,公式为
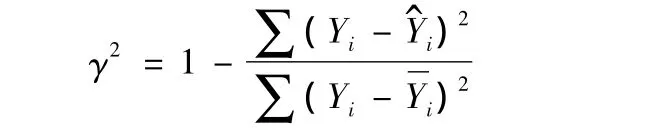
拟合度越接近1,说明回归曲线对原来的数据拟合越好。代入100组实际观测数据,使用MATLAB进行计算和图形处理,得到曲线拟合对比,如图4,并计算得到γ2=91.80%,说明该模型符合要求。
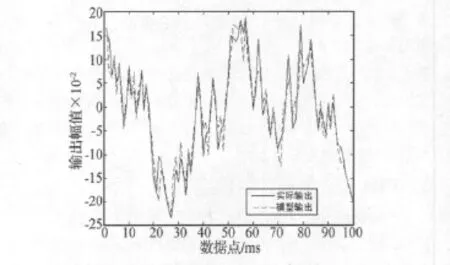
图4 曲线拟合对比
4 结束语
本文基于dSPACE系统平台,使用PRBS信号对电动缸进行了建模,依次详细论述了系统平台的构建,PRBS信号参数的确定,具体模型的构建及模型的验证等主要环节;以此为基础还编写了相应的信号发生程序、系统辨识程序以及数据处理程序,并将该程序应用到了对某电动缸辨识的过程中,经验证,该方法是切实可行的。
通过采集现场运行数据,采用系统辨识理论,对电动缸进行了建模,其优点在于:避免了在进行机理建模时计算大量工质特性参数和求解大量微分方程;该模型是基于电动缸实际运行数据而建立的,能够有效地反映动态变化过程,可以为电动缸控制系统的设计提供理论模型和参考依据,并且dSPACE系统的实时性和半实物仿真的特点也适用于控制系统的仿真设计及优化中。
[1]李赫,项东,刘恩朋.基于WinXP的实时控制在某舵机电动缸加载中的研究和应用[J].测控技术,2010(10):67-69.
[2]樊精彪,宋海,兰岳光.大方坯电动缸非正弦振动系统的开发与应用[J].世界钢铁,2009(3):25-27.
[3]贾华川;电动缸非正弦振动在板坯连铸机上的应用[J].甘肃冶金,2008(5),80-83.
[4]张小蓉,梁素兰.电驱动+电动缸"系统在立体织物装备中的应用[J].中国制造业信息化,2007(17):63-65.
[5]步进机电有限公司;EXLAR电动缸在运动仿真、测试设备的应用[J].伺服控制,2007(4):82-83.
[6]唐英.电动缸的传动和受力分析[J].重型机械科技,2007(4):10-11,14.
[7]徐文灿.电动缸与气缸[J].液压气动与密封,2006(2):19-24.
[8]许静.BOSCH电动缸在压装机中的应用[J].国内外机电一体化技术,2005(3):68-69.
[9]初兴义,惠文涛,李贵良.电动缸在医疗器械中的应用[J].医疗装备,2002(5):38-39.
[10]张桅,赵剡,张寅.基于 dSPACE的频率特性测试与模型辨识研究[J].宇航计测技术,2010(2):57-60.
[11]徐岸非,辜承林.永磁同步电动机矢量控制系统仿真分析[J].微电机,2008(9):30-33.
[12]冯培悌;系统辨识[M].杭州:浙江大学出版社,2004.
[13]高玉凯,李楠;基于零阶保持器的非均匀采样信号恢复方法[J].齐齐哈尔大学学报,2010(9):1-4.
