应用差分GPS实现小麦精播机器人定位※*
2011-06-25邱燕林海波董树亮仪垂杰
邱燕,林海波,董树亮,仪垂杰
(青岛理工大学 计算机工程学院,青岛 266033)
邱燕(硕士研究生),主要研究方向为小麦精播机器人。
引 言
相对定位又包括惯性定位和测距定位,是通过测量机器人相对于初始位置的距离和方向来确定机器人的当前位置,通常也称作航迹推算法(dead reckoning)。常用的传感器包括光电编码器、里程计及惯导系统(速度舵螺、加速度计等)[2]。相对定位的优点是机器人的位姿是自我推算出来的,不需要对外界环境的感知信息;缺点是漂移误差会随时间积累,不适于精确定位[3]。
绝对定位主要有导航信标定位、主动或被动标识定位、地图匹配定位和GPS卫星导航定位。绝对定位的优点在于定位误差是有界的,定位精度较高。这几种方法中,信标或标示牌的建设和维护成本较高;地图匹配技术处理速度慢,或者是不精确;GPS只能用于室外[4]。
考虑到小麦精播机器人的作业环境是在一定区域的农田中,要求具有较高的定位精度,而且是在室外工作,所以采用差分GPS卫星导航定位。它的定位原理如下:采用两台GPS接收机,一台是基准站,另一台是移动站。已知一个点的坐标,并且在已知坐标的固定点上架设一台GPS接收机(称基准站),通过GPS的定位数据和已知坐标点的数据解算出差分数据(RTCM),再通过数据链将误差修正参数实时播送出去。基准站通过数据链接收修正参数并传给移动端,移动端修正参数后和自己的定位数据进行修正计算,即可将定位精度提高到cm级。
1 小麦精播机器人定位系统
基于差分GPS小麦精播机器人定位系统的主要设计思想是:首先设定好机器人的理想行走路径并显示出此路径;然后由GPS测得移动机器人的经纬度信息并且在地图中显示,调用路径规划算法使机器人沿理想路径行走。总体程序流程如图1所示。

图1 小麦精播机器人定位系统总体程序流程
1.1 GPS数据的接收和提取
GPS全球定位系统是由24颗卫星均匀分布在6个轨道平面内来保证任何时间、任何地点都能定位,其定位误差与时间无关。因此,GPS卫星定位技术为移动机器人实现自主性提供了强有力的保障[5]。
为了利用GPS的数据来测量小麦精播机器人的位姿,首先就是要实现GPS接收机与小麦精播机器人上位机的顺利通信,然后再提取机器人的位姿信息。GPS接收机与小麦精播机器人上位机的通信采用串行方式。因为GPS接收机接到的是TTL电平,而上位机接口为RS-232电平,所以要进行电平转换[6]。
GPS数据的接收和提取程序是在NI公司的图形化编程语言Labview环境中设计完成的。利用Labview中VISA串口配置函数和VISA串口读取函数使GPS与上位机通信,读取GPS数据信息。
GPS接收到的数据信息有多种,例如GGA、GSA、GSV、GST、ZDA等。这些信息的作用分别是:$GPGGA输出GPS的定位信息;$GPGSA输出当前卫星信息;$GPGSV输出可见卫星信息;$GPGST输出定位标准差信息;$GPZDA输出UTC时间信息。本定位系统主要利用定位语句$GPGGA中的部分数据信息(即小麦精播机器人所在位置的经度、纬度和是否有效信息),通过Labview中字符串截取函数来提取这3种信息。
GPS数据接收和提取的程序流程如图2所示。最终运行结果如图3所示。
从南通已经内化的风俗习惯意识理念,可以总结这里的人克己宽人,洒脱飘逸,无论顺境逆境都能坦然面对的心态,借助于特定形式加以弘扬。
1.2 经纬度的坐标转换
由于GPS接收机采集到的定位数据是WGS84坐标系统下的经纬度数据,在实际的应用中需要的大多是国家坐标系或是独立坐标系,因此需要把它转换成某一平面坐标系中的坐标,以便能够在地图中显示定位结果和小麦精播机器人的规划路径[7]。我国地图的坐标系统主要有1980西安坐标系和1954北京坐标系两种,两者坐标系都是属于投影坐标系,即把球面坐标转换成平面坐标后的坐标系。其中,1980西安坐标系采用的是1975国际椭球体,1954北京坐标系采用的是克拉索夫斯基椭球。
结合地理位置因素,为了使小麦精播机器人的定位更加精确,这里把大地坐标系转换成1954北京坐标系。转换步骤分为两步:首先将 WGS84大地坐标(B,L)转换为对应于WGS84椭球的高斯平面坐标(X,Y);然后再经过平面转换将高斯平面坐标转换为1954北京坐标(x,y)。
1.2.1 高斯投影
将大地坐标(B,L)转换为高斯平面坐标(X,Y)的公式称为正算公式,反之称为反算公式,这里为了编程方便只采用正算公式。将经纬度转换成平面X、Y坐标,即(B,L)→ (X,Y),具体转换公式略——编者注。
1.2.2 平面转换公式
平面坐标转换的目的就是将高斯平面坐标(X,Y)转换为当地国家坐标系或独立坐标系下的高斯平面坐标(x,y)。在通常情况下,常用的平面坐标系间的转换有:相似变换、仿射变换、双线性变换以及二次或高次多项式变换等。相似变换完全是两平面坐标体系间的转换,未考虑系统误差,它需要4个参数,即2个已知点在2个平面坐标系下的相应坐标;仿射变换需要6个参数,在相似变换的基础上考虑了纵横坐标尺度因子的差异,它需要3个已知点在2个平面坐标系下的相应坐标;二次或高次多项式变换建立映射关系可以削弱两坐标系统之间的平移、缩放、旋转和地球椭球参数不同引起的误差,以满足更高精度的要求。若采用二次或高次多项式变换,可削弱两坐标系统之间的旋转、平移和地球椭球参数不同引起的误差,使得转换后的坐标精度更高[8]。这里采用二次多项式变换,将高斯平面坐标系下的(X,Y)坐标转换为1954北京坐标系下的(x,y)坐标,具体公式略——编者注。

图2 GPS数据接收和提取程序流程
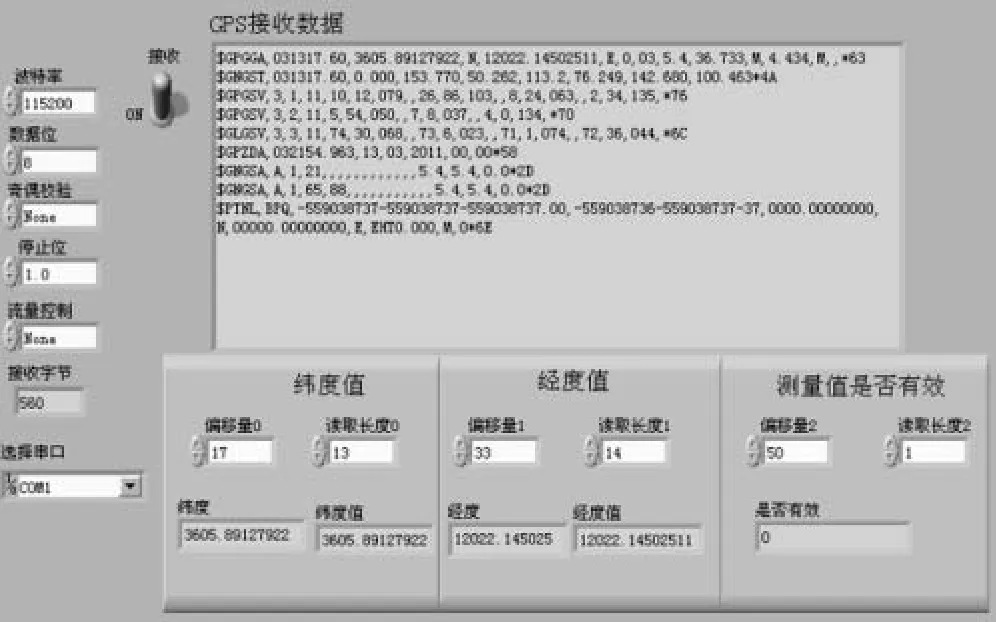
图3 数据接收和提取运行结果
1.3 路径规划及轨迹跟踪
本课题中要求机器人从给定的初始状态出发,跟随一条理想的几何路径进行播种,机器人的初始点可以在这条路径上,也可以不在路径上。在Labview中picture控件是最基本的图像显示控件,通过对像素的处理可以灵活地显示任何复杂的图形,所以选用picture控件来实现道路规划和实际行走轨迹的绘制。
1.3.1 路径规划
用plot XY.vi函数来进行道路的规划,用一维数组来存储路径关键点的坐标(命名为数据),该一维数组中的每个元素是由X和Y像素坐标组成的簇。路径规划程序运行结果如图4所示。

图4 路径规划程序运行结果
1.3.2 轨迹跟踪
轨迹跟踪对于调整机器人的行走路径,使之沿着理想路径行走具有重要的意义[9]。Labview的波形显示控件能够很好地显示各种波形和图形,但是不够灵活,这里同样选用picture控件来实现观测卫星运行轨迹图的绘制。用String Subset控件分解提取信息的同时,把每次获取的有效的卫星信息转换为平面坐标下的坐标,并按顺序保存在一个数组里。与路径规划一样,也是使用plot XY.vi函数来显示机器人的轨迹图。轨迹跟踪的程序框图如图5所示。
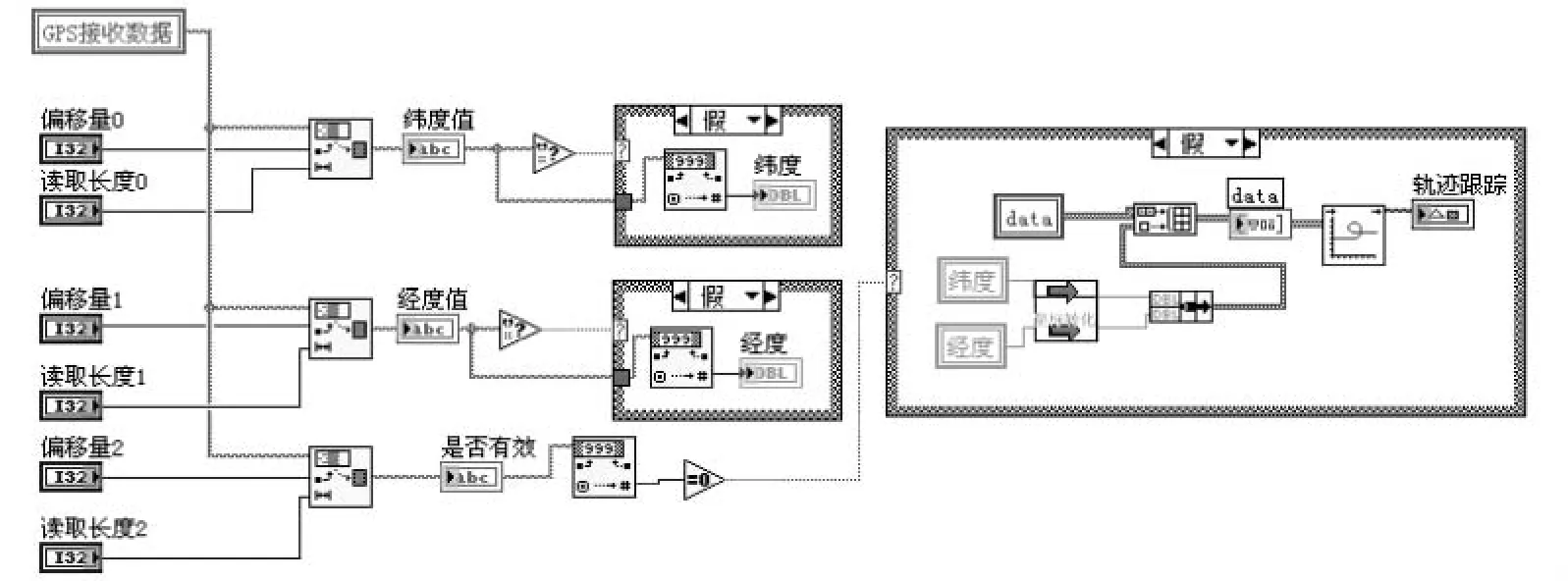
图5 轨迹跟踪程序框图
2 小 结
采用差分GPS对小麦精播机器人定位,由移动站和基准站组成,通过在固定测站和流动测站上进行同步观测,利用在基准站上所测得的卫星定位误差数据改正移动站上定位结果的卫星定位。这种差分GPS的优点是定位精度较高。实验表明,小麦精播机器人的实际行走路径和规划路径是基本重合的,但是由于许多人为的因素使差分GPS移动站接收到的GPS数据存在一定的误差,还需要进一步改正。
编者注:本文为期刊缩略版,全文见本刊网站www.mesnet.com.cn。
[1]郭戈,胡征峰,董江辉.移动机器人导航与定位技术[J].微计算机信息,2003,19(8):10-11,72.
[2]张毅,罗元,郑太雄,等.移动机器人技术及其应用[M].北京:电子工业出版社,2007:140-165.
[3]Thrun S.Finding Landmarks for Mobile Robot Navigation[C]//Proc of IEEE Inter Conf Robotics and Auto,1998.
[4]王卫华.移动机器人定位技术研究[D].武汉:华中科技大学,2005.
[5]贺鑫元,马树根,李斌,等.基于GPS的蛇形机器人导航方法[J].高技术通信,2004,14(9):67-70.
[6]孟祥荔.基于GPS定位的移动机器人导航系统的研究[D].天津:天津理工大学,2007.
[7]韦艳,陈华根.GPS定位显示中的坐标转换[J].海洋测绘,2010,30(3):16-19.
[8]罗德安,廖丽琼.一种车载GPS系统坐标转换公式及其应用[J].西南交通大学学报,2001,36(4):365-368.
[9]Lin Haibo,Li Qing,Xiu Yufeng.Research and Development on the Key Technology of Wheat Single Seed Robot[C]//World Automation Congress(WAC),2010:339-343.