基于应用的多测距音测距改进技术
2011-06-13党赟
党赟,周 亮
(1.西安电子科技大学,陕西西安710071;2.中国电子科技集团第五十四研究所,河北石家庄050081)
0 引言
在USB统一测控系统中,测距采用多测距音测距方案。由于多测距音测距过程中,只进行一次距离匹配,后续距离测量结果是利用精测距音相位变化换算而得到的。因此距离测量结果受载波跟踪和测距音跟踪情况的影响。经过对测距结果影响的分析,提出解决方法,并结合工程应用进行验证。
1 多测距音测距
多测距音测距时,测距发终端发送出连续正弦波信号,经过地面—卫星—地面延时后到达测距收终端,在同一时刻对测距发、收终端测距音相位进行采样,得到测距音发相位 Φ发、测距音收相位 Φ收,用Φ发-Φ收可得到由于距离延时对测距音带来的相位变化,由该相位差可以计算出目标延时。
在工程应用中,频率高的测距音精度高,作用距离短;频率低的测距音精度低,作用距离远。在卫星测控领域,卫星距离从几百千米到几十万千米不等。
多测距音测距选用一组频率互为倍数关系的测距音,在测距过程中,由低到高顺序依次发送,待前一测距音得到测量结果后再发送下一测距音,最后一个测距音发送完毕后,利用该组测距音测量结果进行距离结果匹配,计算出目标距离。这种体制的优点是,发射机全部功率能相继单独用于某一测距音,从而提高捕获的可靠性和测距精度,而且硬件实现较简单。缺点是,顺序捕捉是串连捕获,会增加捕获时间,还必须考虑2次捕捉之间的距离时延。
1.1 多测距音测距原理
为了兼顾测量距离和测量精度,测距音并不唯一,通常选取一系列频率有倍数关系的测距音。通常为 7测距音:8 Hz,32 Hz,160 Hz,800 Hz,4 kHz,20 kHz,100 kHz。
在实际使用中,4 kHz及以下的测音相差是通过在16 kHz频率上折叠后通过数学运算实现的。
如8 Hz信号相差是通过下式得到:

同理,
频率较低的测距音波长较长,所以作用距离远,主要用于为高一级测距音进行解模糊,精测距音波长短作用距离短,用于保证测距精度。
1.2 测距过程
1.2.1 测距音轮发
为了保证测距音最大能量,在同一时刻只能发送一个测距音,测距音发送按照由低到高顺序进行发送。轮发过程由基带监控控制,在上一个测距音捕获并稳定跟踪后,取3~5个数据点,然后控制发送下一个测距音,直至精测距音捕获完成。
1.2.2 速度辅助测距捕获
由于同一时刻只能发送一个测距音,在测距音轮发过程中,目标在持续运动,所以在100 kHz发送完毕进行距离匹配时,已经轮发完毕的测距音结果与100 kHz测距音相位结果不在同一时间点。所以需要对已经轮发完毕的测距音相位结果进行修正,当100 kHz测距音轮发完毕进行距离匹配时,修正后的各测距音相位应保持在同一时间点。
测距音修正方法:利用实时速度结果计算出一定时间间隔内的测距音修正量,然后对前一时刻测距音相位进行修正。计算方法如下:
①在T1时刻,测距音N的相差结果为Φ1,该时刻速度为V1;
②到T2时刻时,目标已经发生了运动,运动距离ΔR=V1×ΔT;
③ΔT=T2-T1,利用目标运动的距离,计算出由于目标运动造成测距音N的相位变化,ΔΦ=ΔR/λ×360,其中 λ为测距音N的波长;
④这样经过修正的T2时刻测距音N的相差结果 Φ2=Φ1+ΔΦ。
其中,ΔT一般为50 ms。
1.2.3 距离匹配
在距离匹配时,各个测距音对应的延时相同。由于各个测距音之间频率比关系,各个测距音相差有以下关系:


在以上公式中,8 Hz测距音无相位模糊,由8 Hz测距音相差可为32 Hz测距音解相位模糊,依次类推可以得到当前距离结果所对应的100 kHz测距音整周期个数,目标距离计算方法如下:
目标距离=((((((N32Hz×5+N160Hz)×5+N800Hz)×5

式中,λ100kHz表示100 kHz测距音波长。
1.2.4 距离跟踪
距离捕获完成以后,转为跟踪测量阶段,只发精测距音,此时的距离匹配方法称为判进位换零头法。设捕获结束时刻(t7)已匹配的数据为N100kHz(t7)+Δφ7(t7),N100kHz(t7)为精测距音收发相差的整周数,Δφ7(t7)为零头数。下一时刻的相位结果数据为N100 kHz(t7+1)+Δφ7(t7+1),因为当前跟踪阶段只能测出Δφ7(t7+1),所以需要确定N100 kHz(t7+1)。在2个采样间隔内部,不能出现精侧音跳周现象。所以,。
由上式可知:


如果 Δ φ′7(t7+1)<-180,则认为目标远离,

设(t7)时刻距离结果为R(t7),则(t7+1)时刻距离结果为:

2 技术问题分析
2.1 捕获问题分析
由式(1)可知,距离匹配结果取决于各个测距音相差结果。所以在测距音轮发过程中发生载波闪锁现象时,由于锁相环工作的延时性,测距音不失锁,但此时测距音相位结果为无效值,用该无效值进行距离匹配,距离结果会错误。
2.2 跟踪问题分析
距离捕获完成后,当前时刻测距结果是根据前一时刻测距结果结合当前测距音相位变化而计算出的。在跟踪过程中出现以下情况时,距离结果会发生错误,导致距离结果无效。

①如果测距音失锁,此时测距音相位结果错误,从该时刻起所有距离结果可能错误;
②如果载波闪锁,由于锁相环工作的延时性,测距音不失锁,此时测距音相位结果错误,从该时刻起所有距离结果错误。
3 解决方法
3.1 捕获问题解决方法
针对捕获阶段问题,采用以下方法解决:
①在测距音轮发过程中,对载波锁定进行实时判断,如果发生失锁则任务本次距离捕获失败,重新进行距离捕获;
②在测距音轮发过程中,对每个测距音结果进行取数前,增加测距音锁定稳定时间,并根据当前速度对测距音相差结果进行合理性判断,判断合理的数据才可以使用。
测距音轮发过程流程图如图1所示。
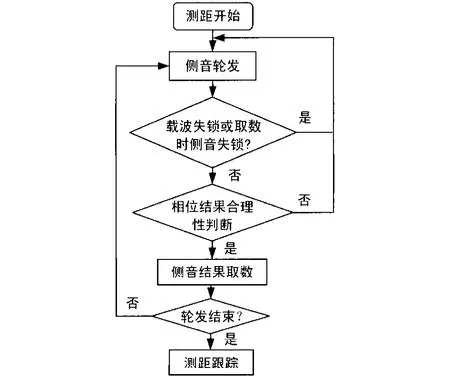
图1 测距音轮发过程流程
相位结果合理性判断是解决问题的关键。判断算法如下:
设当前时刻目标运动径向速度为V,发送测距音频率为F。前一时刻测距音收发相差为 Φ1(°);当前时刻测距音收发相差为 Φ(°);设误差门限为G(°),C为光速;默认取采样间隔为50 ms。

3.2 跟踪问题解决方法
针对跟踪阶段问题,采用以下方法解决:
①实时判断载波和测距音锁定状态,如果测距音失锁,此时可利用速度对当前距离进行辅助递推,待测距音重新锁定后,重新利用测距音相位变化对测距结果进行计算;
②由于在失锁前上报的测距音相位结果已经存在较大误差,应加入测距音相位变化合理性判断算法,当测距音相位变化超过门限值时,可利用速度计算结果替换测距音结果,算法见式(3);
③当测距过程中载波和测距音均失锁时,此时速度和距离结果均为无效,可终止测距过程,重新进行载波捕获,待载波锁定正常后,进行距离捕获。
距离跟踪阶段流程图如图2所示。
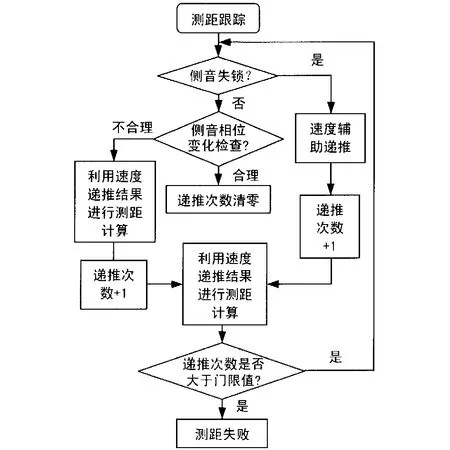
图2 距离跟踪阶段流程
3.3 算法依据
由于测速结果存在系统误差及随机误差,在对测速结果进行累积计算过程中,随机误差也在累加,根据随机过程原理,随机数的累加仍为随机过程,并且其均值和方差不发生变化;但系统误差累积结果会影响距离结果。
测速系统误差按照30 cm计算,精测距音选取100 kHz时,当测速递推结果误差超过精测距音半个波长时,测距结果会跳周而导致此刻以后距离结果错误。
λ=C/F。C为光速,取299 792 458 m/s;F为精测距音频率,取100 kHz;λ=2 997.924 58 m。
递推时间=2 997.924 58/(0.30×2)=4 997 s。
可见,速度递推精度是可以保证的。但是速度值表示积分时间内目标运动的平均速度,在过顶前后,目标加速度较大,导致递推结果偏差增大,不宜递推过长时间。在实际应用中Tg取20 s。
1.8 工程演算
可利用现有USB设备对近地卫星测速、测距结果进行演算,来验证本算法的可行性。
根据卫星正常跟踪圈次数据,将距离捕获完成时刻作为起始点,利用速度结果对该结果进行递推,并将递推结果与实际测距结果进行比较,可以得到如图3所示曲线。从该曲线可看出,经过600 s左右递推后,递推结果与测距结果存在600 m左右的差值,从图3也可看出,在过顶前后由于目标加速度原因递推结果与测距结果的差值变化最快,在20 s内用速度对距离递推结果误差小于100 kHz测距音半波长,不会造成跳周。
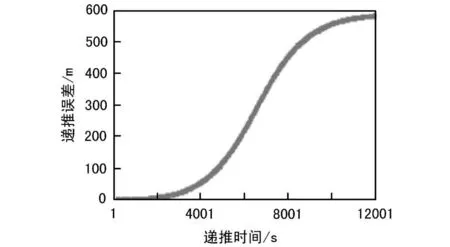
图3 递推距离与原始结果差分比较曲线
4 结束语
经过改进的测距方案可以应对在距离捕获及距离跟踪过程中载波及测距音失锁情况,经过对多圈次卫星测距结果分析及递推比较,递推结果可以满足实际工程应用,避免由于卫星进站时目标信号不稳定导致的距离捕获失败或距离结果无效情况,对于提高设备稳定性有很好的帮助。
[1]周智敏,李企舜.现代航天测控原理[M].长沙:国防科技大学出版社,1998.
