稳态加速度模拟试验设备:离心机设计(17)
2011-06-08贾普照
贾普照
(北京卫星环境工程研究所,北京 100029)
引言
当我们布局离心机总体方案的时候,势必要兼顾到各主要部件与其他分系统方案,即总体设计与部件方案设计基本是同时并举,不会截然分开的。因为有时不排除部件方案反过来影响到总体设计,因此,总体设计与部件方案设计始终是相辅相成关系。当总体方案及部件方案既定之后,部件及分系统的设计细节也将提上日程。
离心机部件设计所研究的对象虽归属于各部件或分系统,但也有着宏观与微观之分。比如部件结构构型及分系统方案就可划为宏观方面——它与总体设计的关系比较密切,依然是我们的研究重点;与前者相比,各部件和分系统个性与细节问题就属微观范畴了。
在研究离心机各部件及分系统设计时,我们依然以历史或现实所呈现的各种具体方案或构造为主,不会涉及一般的专业技术或分析计算。因为前者正是人们灵活应用各种技术手段,沉积于离心机领域的经验与积累,具有其独特性并秉持成功应用(或失败)的属性,它们正是相应专著所应研究的主要内容。如此,结构图或原理图自然就成为最形象的范例了。为集中系统地分析比较它们,势必需要归纳罗列具有代表性的一些资料,包括散见于各章各节内的有关部分,并分门别类地从另外的角
8.1.1.1 桁架结构
8.1.1.2 框架结构度去介绍或评价它们。
8.1 离心机转臂
转臂是离心机转子的基本构件,是吊篮安装的根基,它与试件吊篮或配重部分共同组成转子的平衡体系;转臂也是构成离心机主要几何参数——设计半径的重要构件;它与主轴系统联合在一起成为离心机最主要的承力部件。以上这几个功能与要求决定了转臂的结构必然兼具细长而强固的双重特点。
离心机转臂在静止状态下是以弯矩为主要荷载的悬臂梁,转臂根部危险截面上部为拉应力区,下部为压应力区;运转起来后离心力转变成主要载荷,转臂受力状态由梁转变为拉杆。对于不同离心机,由于端部质量与加速度的不同,危险截面上离心拉应力与弯曲拉应力之比也不尽相同。对于物体离心机来说转臂主要是承拉构件,而载人离心机转臂大致为拉、弯相当的构件。但不管哪一种转臂,其截面强度均是以拉伸与弯曲二者拉应力之和进行计算的。
离心机转臂的整体构型根据结构高长之比可分为高转臂型与低转臂型两类;根据外形相对于旋转中心线是否对称可分为对称转臂与不对称转臂两类;就刚度而言又分为不等刚度、等刚度与变刚度转臂等;绝大多数的转臂与主轴支撑系统为刚性连接,但也有铰连接的情况,分为固定式转臂与活动转臂。后者就垂直面而言可为摆动式(天平式)转臂,或相对于臂中心线而言为自旋式转臂等等。
离心机转臂的结构构型,从集成方式看主要分为装配式与焊接式两类:由锻造实杆、钢带等作为主承力件时,限于工艺等原因需要装配成形;由其他轧制型钢构成桁架、框架、箱形等结构时就可采用焊接成形。因此如果从结构、用材、工艺等不同排列组合细分下去,就愈加琳琅满目了。
鉴于离心机转臂结构构型具有特殊性,而整体构型具有普适性,即几乎每一种结构构型都有可能构建出不同的整体构型来,比如桁架式转臂既可构建为对称转臂也可构建不对称转臂等等,笔者准备以转臂的整体构型为主线来进行阐述。
8.1.1 高转臂构型
高转臂构型的特点是转臂高于试件吊篮,至少与之相当,设计者将转臂当作主要受力构件处理。通常桁架臂与框架臂都属于高转臂构型,被应用在加速度不太高的离心机上。
8.1.1.1 桁架结构
桁架结构应用于离心机转臂的历史源远流长,大抵缘自其比较适合于悬臂梁的特点,而最早的采用首先见诸载人离心机。作为载人离心机,因其转臂半径较长,座舱尺寸和质量较大,径向加速度数值不高,根部弯矩相对较大,受力形式更接近于梁,于是从最早的鼻祖机到最近的载人离心机都采用了桁架式转臂。早者如本文概述部分已经介绍过的1941年出现的“同盟国”第一台载人离心机,现示于图8-1。

图 8-1 同盟国第一台载人离心机Fig.8-1 First Ally manned centrifuge
早产的这台离心机先天不足,存在不少问题,采用不平衡不对称桁架机构的转臂仅此一例。
让我们探讨一下它的问题:该转子被固定在旁置臂端的主轴支撑系统上,它不仅不对称,而且还没有明显的配重部分,主轴呈偏载态。座舱支点也被安置在转臂最下端,整个转子无论绕主轴还是相对于转臂水平中心线,上下左右都处在质量不对称、动静不平衡的状态。加上细而长的主轴,尽管顶天立地扎根于天花板与地基之间,但可想象,一旦旋转起来必然晃晃悠悠,估计转动速度高不到哪里,尚且具有相当的危险性。看起来,这台离心机的设计者当时还未掌握到转子设计的“三昧”,只是简单地将各个功能件搭建起来了。
同期,美国著名的 Mayo Clinic(梅奥诊所)研究抗荷服所使用的载人离心机就出色多了,如图8-2所示[1]。与上例不同的是它采用了对称式转臂,座舱(笼子)也放在转臂中心线上,转子的平衡得以极大改善。为了增强主轴刚性,将转子高度扩大至顶天立地的程度,主轴的横向也伸出一大块,为的是利用斜撑加强转臂。在转子底部铺以钢板,使转子变成了一个旋转大舞台。总之,好是好了,然而显得不够轻巧。
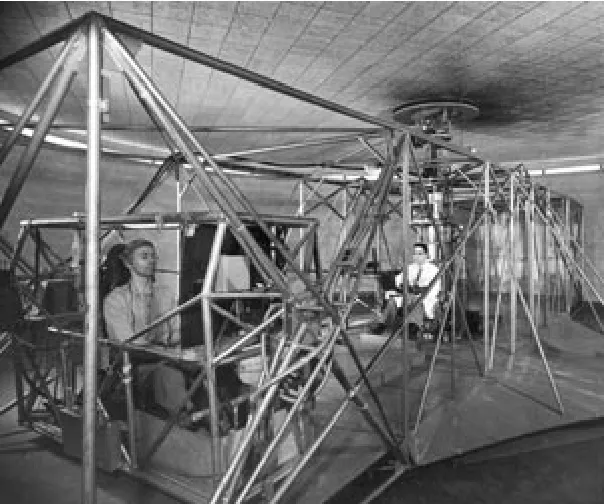
图 8-2 Mayo Clinic研究抗荷服使用的离心机Fig.8-2 Mayo Clinic centrifuge for study of the use of anti-G suit
以上二机说明,当时载人离心机一开始就是对称臂与不对称臂并蒂而现。但笔者估计该不对称转臂的出现偶然性较大,不一定是缘于加速度增长率的考虑,因为那时战斗机机动性尚不太高,建造离心机的主要目的只是为取得稳态加速度而已。
由于对称转臂的稳定性使对称臂载人离心机在英美流行了相当一段时间,比如图8-3所示而第4章已介绍过的NASA 20g载人离心机也是一例。该转臂采用角钢焊接而成,它除维持顶天立地的高对称式桁架臂外,其他部分也有所改进:其一是将两端完全对称起来,转子平衡得以进一步改善;其二是没有了大舞台的样子,显得轻巧多了。

图 8-3 NASA 20 g离心机Fig.8-3 NASA 20 g centrifuge
图8-4为英国QinetiQ's公司的载人离心机[2],基本构型同上,但转子高度相对于屋子已有所降低,且将座舱与转臂分开来,架在转臂水平对称面上,似可摆动。该机不仅处理了平衡而且注意到风阻问题,桁架臂采用了圆管焊接,座舱外形也刻意予以整流,外观显得漂亮了许多。

图 8-4 英国QinetiQ's公司载人离心机Fig.8-4 British company QinetiQ's human centrifuge
桁架式转臂除被载人离心机采用之外,少数物体离心机也曾采用过。例如图 8-5所示的就是NASA Goddard中心现已停止使用的大型桁架式对称臂物体离心机[3],该机转子像是板式或空心型钢的焊接结构。转子半径长120 ft(36.576 m)、重50万 pound(2.268×105kg),可使 5 000 pound(约2 268 kg)有效载荷加速到30g;具有三自由度夹具,供试件安装或定位于不同的角度与高度用。该离心机的载荷容量虽然并不太大,但结构看起来强劲有力,敦实有余。

图 8-5 NASA大型板条桁架式物体离心机Fig.8-5 NASA large-scale lath truss type object centrifuge
转子平衡除采用对称臂构型之外,还有没有其他办法?于1959年开始研制、1962年使用的北京卫星环境工程研究所第一代中型物体离心机也采用了桁架式转臂,而且还是不对称的板条结构桁架式转臂,如图8-6所示 。

图 8-6 北京卫星环境工程研究第一代中型离心机Fig.8-6 BISEE’s first-generation medium-sized centrifuge
这是一台不对称臂依靠配重的方法取得转子平衡的离心机。不对称转臂的采用可能是想减少一些风阻,可是相对较大的配重吊篮以及板式结构又使得风阻缩减有限。此外,采用铝制吊篮的根据也不足,铸铝件还会埋下强度隐患。总之,该设计也许显得稚嫩,说明当时对离心机整体构型及部件间关系尚缺乏深入研究。随后的改进设计在克服某些缺陷上有所进步,但该机最大贡献在于用事实证明了不对称转臂通过配重方法可以取得转子平衡,成为质径积平衡原理在离心机转子上得以实现的实例;而曾经有所顾忌的风阻不平衡等问题并未发现有多大影响。
图8-7可以作为处理不对称转臂另一思路的例子,那就是美国NASA Ames研究中心半径为30 ft(9.144 m)的五自由度运动模拟器[4],于1961年投入运转。其构造非常有意思,虽然转臂有一个配重端,但似乎又不足以有效平衡试验端,于是就在试验端附加了一个可转动的支撑系统,同时利用它还增加了上下方位的运动,构成所谓五自由度离心机。其运动方式为:座舱俯仰±40°、滚转±90°、偏航±70°,加上离心机在水平面内的曲线运动以及沿垂直方向的上下移动±1.75ft(±0.533 4 m),可以形成3个角位移加1个曲线位移及垂向直线位移所构成的复合运动。

图 8-7 NASA Ames 中心五自由度运动模拟器Fig.8-7 NASA Ames 5-DOF motion simulator
不采用质径积平衡法,而类似在转子试验端提供垂直支撑,比如采用平滑的大直径滚道构建更大半径离心机或用波形滚道为试验端附加垂直振动等等的设想都曾出现过,但发展的结果仍然还是集中到对转子进行平衡的思路上,并且实现了像前苏联巨型载人离心机那样长的转臂以及在试验端附加了各种振动台的离心机等等骄人结果。
对称臂虽使转子平衡得以改善,当发展到长转臂大载荷高性能载人离心机的时候,就出现了更多的不对称转臂离心机,比如图8-8[5]和图8-9[6]等均为20世纪60年代初出现在美国NADC的动态飞行模拟器,它们都有不对称的桁架式转臂。此时观察该不对称转臂的选择,应该理解为已是基于理性分析后的主动为之:因为既然是动态飞行模拟器,对启动过程必然有加速度增长率要求。前已述及,不对称转臂的惯性功率损耗是相对较小的。

图 8-8 美国NADC动态飞行模拟器之一Fig.8-8 One of US NADC dynamic flight simulator
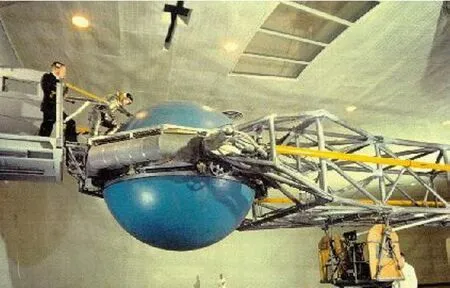
图 8-9 美国NADC动态飞行模拟器之二Fig.8-9 Another of US NADC dynamic flight simulator
北京卫星环境工程研究所于20世纪60年代末开始研制的半径为10 m(三轴舱)和12 m(单轴舱)特大型物体-人体两用离心机,也是采用的不对称桁架式转臂。该机的两用特征正好证明了桁架式转臂的适应性,成为一物两证的实例,即桁架式转臂既可适用于载人离心机,也可适用于物体离心机,见图8-10和图8-11。

图 8-10 北京卫星环境工程研究所12 m半径单轴舱载人离心机Fig.8-10 BISEE single-axle cabin manned centrifuge of radius of 12 m
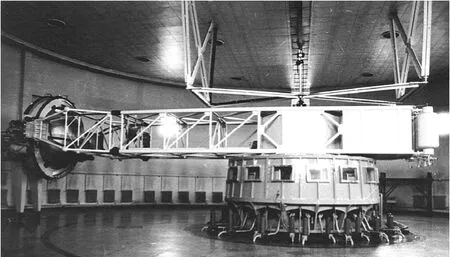
图 8-11 北京卫星环境工程研究所10 m半径三轴舱载人离心机Fig.8-11 BISEE three-axle cabin manned centrifuge of radius of 10 m
从图 8-11中可以看到该不对称转臂的一端是固定式配重,另一端为试验舱。不论单轴舱还是双轴舱都是供人进行试验的舱体,当需要对飞船例行试验的时候,转臂试验端采用了4个可拆卸的双向螺旋接头结构,可分别与三轴舱、单轴舱或整船专用叉头间换接。其中单轴舱叉头为加长型,它使半径又增长了2 m,螺旋接头如图8-12所示。

图 8-12 转臂双向螺旋接头Fig.8-12 Arm’s stud joints
双向螺旋接头的结构非常简单,与转臂外观也较统一,适于承受很大的拉力;但螺旋间隙可能会影响到转臂的横向刚性。当需要提高转臂固有频率的时候,螺旋接头是否会成为瓶颈,值得注意。
不对称转臂载人离心机比比皆是,下面又是一些不对称桁架式转臂载人离心机的例子:图 8-13和图8-14在第3章已经介绍过,是前苏联的TsF-7载人离心机;图8-15为法国Latecoere公司的载人离心机。

图 8-13 前苏联TsF-7离心机外观之一Fig.8-13 One of former USSR TsF-7 centrifuge

图 8-14 前苏联TsF-7离心机外观之二Fig.8-14 Another of former USSR TsF-7 centrifuge

图 8-15 法国Latecoere公司载人离心机Fig.8-15 French Latecoere Corporation human centrifuge
最近几年 AMST公司研制的不对称桁架式载人离心机如图8-16和图8-17所示[7]。

图 8-16 AMST 2006年为德国研制的载人离心机之一Fig.8-16 AMST’s first human centrifuges developed for Germany in 2006

图 8-17 AMST 2006年为德国研制的载人离心机之二Fig.8-17 AMST another human centrifuge developed for Germany in 2006
AMST公司桁架转臂的节点非常精致,如图8-18所示。

图 8-18 AMST载人离心机桁架转臂节点Fig.8-18 AMST human centrifuge girder arm node
经过半个世纪的发展,离心机已由使用者单打独斗自行研制逐渐过渡到商品化阶段,商品化不仅使产品质量得以保证,外观也越来越漂亮了。
概括起来看,本节不仅研究了桁架式转臂,同时也探讨了对称臂与不对称臂的问题,总之:
· 桁架式转臂连绵了近七十年而长盛不衰,说明它在离心机世界具有较好的适应性。
· 桁架式转臂虽然被少数物体离心机时有采用,但大多数皆为载人离心机所青睐。
· 转臂桁架大部分采用圆管构造。虽然板条或角钢桁架的工艺性较好,可铆可焊,但风阻稍大,也不如圆管美观。
· 圆管桁架需要解决好焊接节点问题。
· 不对称转臂是载人离心机转子的正确构型,从其发展进程和数量多寡上也可得以佐证。历史上最早出现的不对称转臂或许是偶然的,但随着加速度增长率提高就走向理性与必然,理由可见功率设计部分。
· 桁架式转臂的优点是构造简单、工艺性好,风阻较小、毋需整流;不足是固有频率较低,值得进一步与其他构型进行比较研究。
8.1.1.2 框架结构
框架式转臂可能源于英国,从受力和设计难度上讲它是最简洁的转子结构了,简单到可以没有吊斗或吊篮部分,试件直接安装在转臂框架的径向横端即可。
框架转臂的特点是以封闭的矩形框为基本构件,模型箱或配重直接安放在框架端梁上,使框架形成为一个闭合的受力构件。如果高度不够,沿着高度方向逐一叠加框架即可,如图8-19和图8-20剑桥大学 CUED实验室 10 m土工离心机便是如此,它的最高加速度为155g。

图8 -19 CUED 10 m土工离心机转臂外观Fig.8-19 CUED 10 m geotechnical centrifuge arm
该转臂每一层框架采用4根断面为400 mm×200 mm、长10 m的热轧空心型钢与端部桥式结构焊接而成,高度方向上叠加了两层。

图 8-20 CUED 10 m土工离心机转子外观Fig.8-20 CUED 10 m geotechnical centrifuge rotor
与 CUED离心机前后出现的曼彻斯特大学西蒙实验室(SIMON)离心机转臂也是框架臂,可看作是 CUED离心机的增高版,以适应更高试件的试验需要,如图8-21和图8-22所示,其最高加速度为140g。
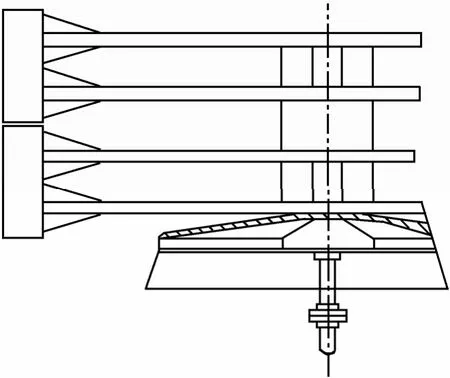
图 8-21 SIMON离心机结构Fig.8-21 SIMON centrifuge
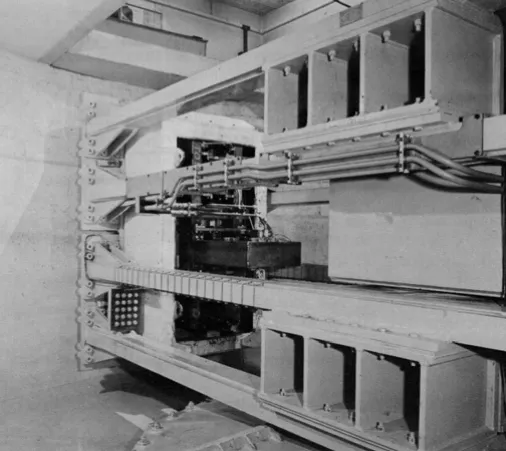
图 8-22 SIMON离心机外观Fig.8-22 SIMON centrifuge
后来因为土工模型试验有时确实需要摆动式吊篮,剑桥大学不得不在既有框架臂基础上着手改进。考虑到增加摆动吊篮仍须维持原端梁受力情况,就创造了一个扭力棒机构来悬挂吊篮:当吊篮被甩平且达到一定受力状态时,该机构可使吊篮在径向移动并紧靠在端梁之上,试件吊篮的全部离心力最终还是交由端梁承受,其结构见图8-23所示。

图 8-23 摆动平台与扭力棒Fig.8-23 Swinging platform and torsion bars
因为后加的摆动式吊篮只需承受几个G的重力,同时也受原有空间限制,吊篮柔弱一点并不要紧,它仅仅是扮演一个容纳模型箱且使模型箱自然转换方向的角色而已。
随着剑桥大学在离心模拟技术方面影响力的扩散,也传播到日本和意大利。从而不但引起框架式转臂的推广,同时也将原本属于改进设计者的一记急智妙着——扭力棒式试件吊篮作为拓展新产品的高招予以推行。例如日本港湾技术研究所(PHRI)本应在重新设计离心机时理顺思路,但却全盘接受了剑桥经验,改进的仅仅是采用了更为强劲的扭力棒机构和更为像样的吊篮而已,结构关系、承力原理等等并没有任何变化,该机如图8-24和图8-25所示,其最高加速度为100g。

图 8-24 PHRI土工离心机转子结构Fig.8-24 PHRI geotechnical centrifuge rotor structure

图 8-25 PHRI土工离心机外观Fig.8-25 PHRI geotechnical centrifuge
图8-26是PHRI离心机的扭力棒结构,看起来它已经足够强大了,更像是一个偏心轴结构。
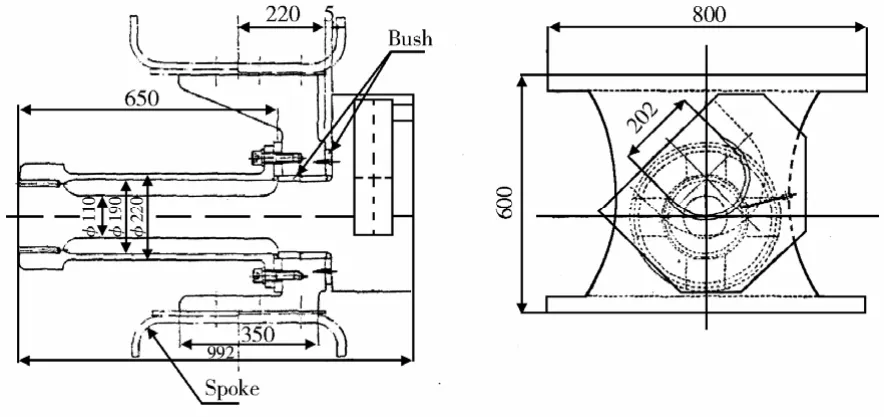
图 8-26 PHRI土工离心机扭力棒结构细节Fig.8-26 Details of PHRI geotechnical centrifuge structure of the torque bar
日本土木研究所(PWRI)土工离心机的转臂也是框架臂,如图8-27所示,它的有效半径为6.6 m。如果与PHRI土工离心机有效半径定义相同的话,指的是主轴中心线至吊篮平台面的距离,减去模型高度的一半0.5 m,则设计半径为6.1 m,对于模型高为1m的离心机来说应该属于“奢华”级,可惜加速度仅达到150g。
它的吊篮强大到可以安置一个400 kN推力的振动台,为此还为扭力棒结构增加了一套液压固紧装置,可以说这台离心机已经把这种结构发展到了极致。

图8 -27 PWRI土工离心机外观图Fig.8-27 PWRI geotechnical centrifuge
日本离心机的框架已经不再是一一叠加了,而是干脆构成了一个立体的空间框架。
当框架式转臂被推广到意大利,贝加摩(Berfamo)结构和模型实验研究所 ISMES要用它构建 600g离心机的时候,其结果可能使得框架式转臂走到了尽头。因为该机从1982年开始研制,截至1998年时加速度才达到90g。关于这台离心机的详细分析请见第3章。
ISMES离心机的经验值得重视。我们说:转子受力状态固然十分重要,殊不知对于高加速度转子来说,更重要的却是它的平衡问题。这也充分说明宏观设计非常关键:本来是一个部件的结构设计,一旦决策欠妥,影响的不仅仅是局部,而是决定着整机的命运。
以上诸事例说明:框架臂与扭力棒摆动吊篮组合结构离心机,其最高加速度大多在150g左右。能不能说这种模式一定做不到更高的加速度?笔者的回答只能是:构建高加速度离心机时务请慎用,除非针对它的固有问题已经有了解决之道。
总之,框架式转臂的特点是:
1)减化了吊篮的铰联接,增大了转子受力的安全性;
2)结构简单;
3)工艺性好;
4)风阻较大;
5)吊篮甩平遗留角大,增加了转子动不平衡;
6)虽然框架转子的高风阻可以通过增加驱动功率和实验室减压两个方法予以改善,但动不平衡的解决则较为困难。因此,框架臂加扭力棒吊篮的组合转子做得不好,的确有可能限制到离心机加速度的提升。
(未完待续)
(References)
[1]Dr.Earl Wood.A research physician’s innovations bore fruit in unexpected ways[EB/OL].[2011-07-22].http://www.tributes.com/show/Earl-Wood-85597585
[2]QinetiQ human centrifuge[EB/OL].[2011-07-22].http://www.flickr.com/photos/qinetiq/4926273438/in/photostream/
[3]Centrifuges[EB/OL].[2011-07-22].http://www.explainthatstuff.com/centrifuges.html
[4]NASA Ames Research Center.Ames 5 degrees- ofmotion simulator[EB/OL].[2011-07-22].http://grin.hq.nasa.gov/ABSTRACTS/GPN-2000-001812.html
[5]US Navy[EB/OL].[20110722].http://www.mjwhitederm.com/US_Navy.html
[6]Mercury astronauts at the NADC centrifuge[EB/OL].[2011-07-22].http://www.navairdevcen.org/astronauts/
[7]AMST 公司网站[EB/OL].[2011-07-22].http://www.amst.co.at
