柔性航天器大角度机动闭环开关序列控制
2011-06-06孔宪仁杨正贤张也弛
孔宪仁,杨正贤,廖 俊,张也弛
(哈尔滨工业大学卫星技术研究所,150080 哈尔滨,yangzhengxian@hit.edu.cn)
柔性航天器大角度机动闭环开关序列控制
孔宪仁,杨正贤,廖 俊,张也弛
(哈尔滨工业大学卫星技术研究所,150080 哈尔滨,yangzhengxian@hit.edu.cn)
针对柔性航天器大角度姿态机动时柔性附件的振动抑制问题,提出了一种闭环脉冲序列控制方法.该方法利用姿态角和角速度作为反馈信号,分别使用喷气推力器、反作用飞轮完成姿态的粗、精控制,以实现航天器的快速大角度机动;同时,为实现平稳的机动过程,设计成形的喷气开关控制指令,以避免机动过程中推力器激起柔性结构的持续振动.全物理实验结果表明,该方法不仅使航天器完成姿态的机动,而且显著地减少了柔性结构的弹性振动,并且具有节省燃料、算法简单、易于在轨实时计算、工程可行性及有效性高的优点.
柔性航天器;大角度机动;喷气开关控制;振动抑制;全物理实验
随着航天技术的发展,现代航天器往往带有大型太阳能帆板等柔性附件.这类柔性航天器的中心刚体和柔性附件之间存在着强烈的刚柔耦合作用,当使用推力器作为执行机构进行快速姿态机动时,非线性的开关控制容易激起柔性附件的持续振动,对姿态机动的平稳以及精度造成影响,甚至可能损害相关设备.因此,有必要研究针对推力器作为执行机构的柔性航天器快速姿态机动控制及振动抑制[1].
对于推力器的控制,其中一类方法是开关命令序列形式,即根据系统机动的角度、时间、燃料、残余振动等约束条件预先产生最优的开关命令序列[2-8],而通过成形器[4-8]来产生次最优开关命令是比较简单高效的方法.这类方法在理论上可实现目标机动后无残余振动的控制品质,日益受到人们的重视,但是该类方法还存在如下问题:需要事先做好精准地规划,当机动任务发生变化时还需要重新设计开关命令序列,是一种开环的控制形式;另外鲁棒性方面,主要是针对结构的固有振动频率和阻尼比的不确定性,但是实际控制效果受如转动惯量、执行机构等不确定性影响很大.推力器的开关控制,另一类方法是非线性调制,即通过对闭环控制输出的连续量进行调制产生的非线性开关控制命令,如 PWM[9],PWPF[10-11],切换函数[12]等.这类非线性的调制方式可实现喷气的闭环控制,但是容易激发柔性结构的振动[1],同时还容易出现频繁喷气现象,浪费资源并降低喷气开关使用寿命.
本文结合喷气控制这2种方式的优点,将成形的喷气开关序列应用到姿态控制内闭环中,对每次喷气开关动作进行成形处理,在利用喷气完成闭环大角度机动时,避免激发柔性结构振动、保持机动平稳.在机动末端,切换执行机构控制模式,利用反作用飞轮完成姿态高精度定向,提高控制效率.全物理实验结果表明,该方法不仅使航天器快速完成高精度姿态机动,而且显著地减少了柔性结构的弹性振动,并且具有节省燃料、算法简单、易于在轨实时计算、工程可行性及有效性高的优点.
1 数学模型
图1所示为带有大型柔性附件的航天器模型,模型包括半径为b的中心刚体、长为l0的悬臂梁、质量为m的尖端质量块.假设柔性梁为小变形小应变下的等截面Euler-Bernoulli梁,材料均匀且各向同性.定义OXYZ为惯性坐标系,oxyz为本体坐标系,ox与未变形的柔性附件轴线重合.w(x,t)代表柔性附件相对于oxy坐标系的变形量,T为作用于中心刚体的控制力矩,姿态角θ代表两坐标系的相对转动关系.ρ、E、I、A分别为柔性梁的体积密度、弹性模量、截面惯性矩、截面积,Jh为中心刚体的转动惯量.

图1 柔性航天器结构示意
依据文献[13-14],忽略柔性梁微小的轴向拉伸量及一些高阶非线性量,得到刚柔耦合系统的一次近似动力学模型,

其中p=[p1p2… p2(n+1)]T为柔性梁单元节点坐标阵,n为有限元单元段数;Jh、Jf、Jt分别为中心刚体、未变形梁及末端质量块相对于中心点O的转动惯量;Td为干扰力矩;U为刚柔耦合系数阵;Mpp、Cf、Kf分别为柔性梁结构质量阵、阻尼阵及刚度阵;D为转动柔性梁动力刚度阵.
2 喷气闭环开关序列控制
2.1 成形器基本原理
使用喷气推力器作为执行机构进行姿态机动时,每一次的喷气动作都将激发柔性附件的振动,但是如果在适当的时间进行喷气开关还是可以消除柔性附件振动的.如图2所示,将喷气的单次“开”命令,变为“开—关—开”命令序列时,先前命令激起的振动被后面的命令消除,使系统在完成刚体运动的同时残余振动得到抑制.这就是输入成形技术抑制振动的基本原理,即由一系列的脉冲信号(成形器)与期望输入指令相卷积所形成的新指令来驱动系统的技术[15].

图2 输入成形原理
适用于喷气开关控制的成形器主要有2种:燃料最优成形器[8]和时间最优成形器[6].针对无阻尼系统,最简单的燃料最优成形器、时间最优成形器分别为 SZV-FE、SZV-TO,具有一阶鲁棒性的燃料最优成形器、时间最优成形器分别为SZVD-FE、SZVD-TO,脉冲序列表达式如下:

其中:A为脉冲幅值大小序列;t为脉冲的作用时间序列;T为系统单个模态振动周期.
将喷气“开”命令与这4种成形器相卷积时,得到喷气开关命令,为实现最终产生打开喷气同时抑制振动的目的,燃料最优喷气开关命令,只产生同向的喷气,而时间最优的喷气开关命令,具有快速“正反向”的喷气特性,这在实际工程中并不实用,一方面会造成燃料的浪费,另一方面当航天器正向、反向喷气力矩大小不一致时,这种通过正反向喷气来消除振动的方法将失效.所以,根据实际工程需要,本文选择燃料最优喷气开关命令对喷气进行控制,同时,忽略柔性梁的弱阻尼影响.
2.2 喷气控制策略
将上一节的成形器应用于喷气闭环调制中,以消除柔性附件的振动,保持机动平稳性,下面分3步设计该喷气控制策略.
第一步,定义喷气的4种“开关序列”.一般喷气存在正向打开、关闭,反向打开、关闭这4种控制命令,但是每一次的喷气动作都会激发柔性附件的振动.根据上一小节的分析,将单次喷气动作变为多次喷气动作,可以消除柔性附件振动,那么将这4种控制命令与成形器SZV-FE结合得到抑制振动的控制命令序列,定义为“正开序列”、“正关序列”、“负开序列”、“负关序列”.基于 SZV-FE的控制命令序列如图3所示,每次命令只产生同向喷气动作,避免不同向喷气,由于正反向力矩不一致,不能消除柔性附件的振动.

图3 ZV-FE的开关命令序列
“正开序列”、“正关序列”为一对完成一次正向喷气动作,“负开序列”、“负关序列”为一对完成一次负向喷气动作.为保证每一次控制命令序列执行的有效性,规定同一时间内只能执行一种控制命令序列,并且只有当一种控制命令序列达到最小作用时间后才可执行下一种控制命令序列.其中最小作用时间为成形器的脉冲序列时间长度,设为tmin.
提出了一种以专业论文文本大数据为数据源的评价因子取值新方法,这种方法使得评价因子研究的信度和效度得到提高。对专家论文进行客观数据分析的方法,降低了以往评价因子取值的个人主观性。为主观评价提供客观数据参考,可以提高评价因子取值方法的客观性和科学性,也符合时代发展需要具有的高效性特点。所以,这种方法是对传统评价因子取值方法的重要补充。
第二步,设计基于喷气推力器的“姿态反馈控制律”,如下:

其中θref、˙θref为期望姿态角度和角速度,θ、˙θ为姿态角度和角速度,g1、g2为增益系数.
第三步,设计“开关序列触发逻辑”,根据公式(1)中Tt(t)的变化,设计触发第一步中4种命令序列的逻辑,即闭环的喷气推力器的控制策略,在每一个控制周期内执行如下命令:
1)如果Tt(t)>a,并且t-tact>tmin,并且上一次喷气控制命令序列不是“正开序列”及“负开序列”,那么触发执行一次“正开序列”;
2)如果Tt(t)>a,并且t-tact>tmin,并且上一次喷气控制命令序列是“负开序列”,那么触发执行一次“负关序列”;
3)如果Tt(t)<-a,并且t-tact>tmin,并且上一次喷气控制命令序列不是“负开序列”,那么触发执行一次“负开序列”;
4)如果Tt(t)<-a,并且t-tact>tmin,并且上一次喷气控制命令序列是“正开序列”,那么触发执行一次“正关序列”;
5)如果 -a≤Tt(t)≤a,并且t-tact>tmin,并且上一次喷气控制命令序列是“正开序列”,那么触发执行一次“正关序列”;
7)如果触发了新的控制命令序列,则更新上一次喷气控制命令序列及tact,否则喷气维持原状态.
其中a为大于零的常值,起到对Tt(t)的过零检测和产生喷气控制死区的作用;t-tact>tmin用于保证每次命令序列能达到最小作用时间,其中tact为上一次喷气控制命令的开始作用时刻;初始状态为空命令序列,即喷气无动作.
那么,喷气开关命令序列控制策略框图如图4所示,姿态反馈控制律输出控制量Tt(t),开关序列触发逻辑根据Tt(t)、当前时间t及上一次的命令,来触发新的开关序列,最后开关序列作用于推力器执行机构.

图4 喷气开关命令序列控制策略
3 喷气-飞轮切换控制
上一小节喷气推力器的闭环姿态控制策略,本质上是一种延迟开关控制,有固定开关作用序列,对慢变控制力矩的处理更为有效,所以一般适用于柔性航天器大角度加速过程和减速过程中的振动抑制,实现姿态的快速平稳机动.但为达到姿态高精度定向目的,在大角度机动末期,当姿态误差趋向为变快小量时,应切换为具有连续力矩输出设备的控制.因此,在姿态机动末端切换为反作用飞轮控制,切换条件设计如下式所示:

即姿态满足一定精度要求时,切换执行机构.那将公式(2)改为

同时,单独设计飞轮控制反馈控制律为

由控制律(3)、(4)可看出,当姿态的误差在飞轮的控制范围时,喷气停止工作;当姿态的误差超过飞轮的控制范围时,由喷气为其提供卸载,避免飞轮的超速保护引起系统失稳.
4 实验系统
为验证本文提出的控制策略有效性,基于图5所示单轴柔性航天器全物理仿真系统进行实验验证.该系统主要分为4部分:1)单轴气浮台、柔性梁、尖端质量块,模拟柔性航天器的无摩擦动力学环境;2)反作用飞轮、喷气推力器,作为执行机构;3)转台测角仪、陀螺、动态应变仪,作为敏感器提供航天器姿态角、角速度及柔性附件振动信息;4)xPC实时控制器,运行控制算法,控制周期为10 ms.系统的物理参数如下:中心刚体转动惯量约为11 kg·m2、中心刚体半径450 mm、柔性梁尺寸1 850 mm×100 mm×1.85 mm、柔性梁体积密度 2.766 7×103kg/m3、柔性梁弹性模量6.895 2 ×1010N/m2、尖端质量块 0.33 kg、反作用飞轮力矩0.55 N·m、喷气推力器力矩输出约0.16 N·m.该仿真系统是1个包含诸多实际工程因素的被控对象,因此基于它进行的柔性航天器控制仿真实验能在很大程度上反映实际情况.
将单轴气浮台浮起,保持系统静止,然后对柔性梁根部施加1个冲击力,记录梁根部的应变变化,对其进行频谱分析,得到系统的前三阶振动频率:0.440 7 Hz、2.987 9 Hz、8.235 4 Hz.通常柔性梁的第一阶模态振动对系统的影响最大,考虑到实验系统中柔性梁阻尼较小,根据系统的频率特性设计抑制柔性梁第一阶模态振动的燃料最优成形器,如下式所示:


图5 柔性航天器全物理实验系统
5 实验结果
为验证本文控制策略的有效性,分别采用文献[11]提出的输入成形联合PWPF喷气调制的控制策略和本文提出的控制策略分别进行柔性航天器全物理系统的60°机动实验,并对其性能进行对比分析.
5.1 输入成形联合PWPF喷气调制的控制策略
采用文献[11]提出的控制策略实现姿态的60°机动,PWPF喷气调制器的参数分别取Kp=5、Km=1、Tm=0.2、Ton=0.5、Toff=0.4,控制器比例、微分增益系数分别取Kp=9、Kd=39.仿真结果如图6所示.

图6 输入成形联合PWPF喷气调制的控制策略仿真结果
图6(a)为PWPF调制下的喷气开关变化图,在姿态机动加、减速阶段喷气常开,在姿态稳定阶段喷气开关频率变大.系统姿态输出见图6(c)、6(d)所示,在20 s左右姿态完成粗机动,但是姿态角输出振动明显,单独使用喷气执行机构无法达到高精度姿态定向.图6(b)为梁根部应变响应图,可以看出PWPF喷气调制方式在姿态机动中激发柔性梁的一阶模态振动,最大振幅达0.7×10-6左右,而且在姿态稳定阶段梁残余振动幅值为0.3 ×10-6左右.
5.2 本文提出的控制策略
采用本文提出的飞轮喷气联合控制策略进行60°姿态机动控制实验.其中取喷气的控制死区界限a=0.04,取飞轮喷气切换条件参数b1=5,b2=0.5,取飞轮、喷气反馈控制参数分别取g1=3,g2=20,f1=8,f2=25,根据成形器(5)的脉冲序列时间长度并考虑硬件执行效率取tmin=1 s.仿真结果如图7所示.
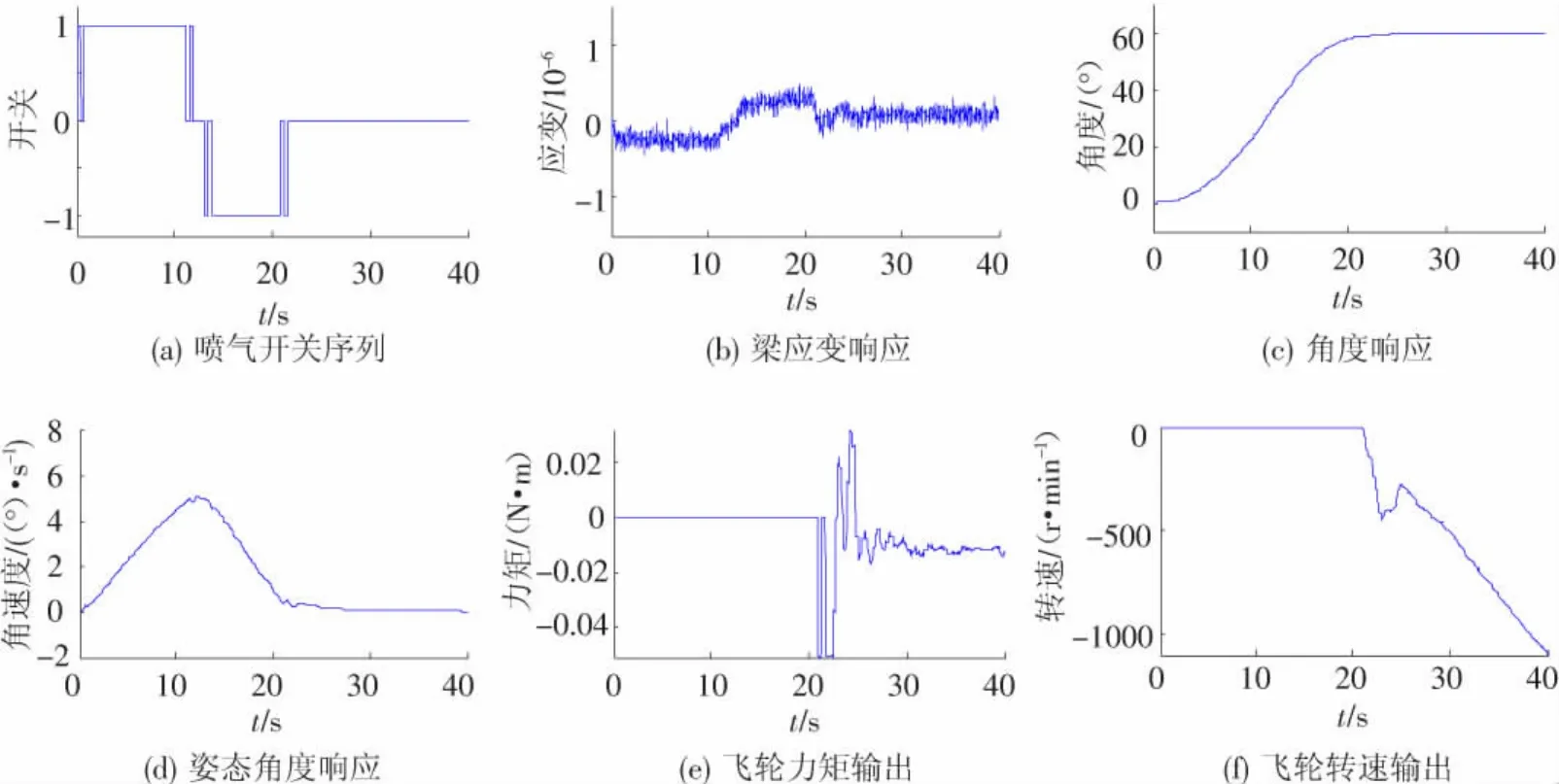
图7 飞轮喷气联合控制策略仿真结果
从喷气开关命令曲线图7(a)可以看出,喷气依次执行了一次“正开序列”、“正关序列”、“负开序列”、“负关序列”,不存在快速正反向喷气现象,燃料浪费少,喷气实际总共打开18.84 s.从飞轮输出曲线图7(e)、7(f)可以看出,在30 s左右时完成姿态高精度定向,同时在姿态期望值附近存在0.01 N·m左右的干扰力矩.在喷气开关控制下,20.83 s时姿态角、角速度误差已在飞轮控制范围内,达到飞轮喷气切换条件,喷气的姿态粗控制功能完成,喷气开始执行“负关序列”,以抑制喷气突然关闭引用梁的振动,同时飞轮开始工作,进行高精度姿态定向控制.由图7(c)、7(d)可以看出,飞轮喷气切换控制时系统响应没有出现突变.对比图6(b)、图7(b)的梁根部应变响应图,可以看出本文控制策略使梁的一次模态振动在整个机动过程中都没被激发出来,但是由于单轴台台面与水平面存在一定的误差角,柔性附件受重力的影响在姿态期望值附件存在微小的应变.
对比这两种控制策略可以看出,与PWPF喷气调制相比,本文闭环开关序列控制的优势在于:在柔性航天器大角度加速过程和减速过程中,有效的抑制柔性梁的模态振动,实现姿态的快速平稳机动.但缺点是,无法处理快速变化的控制小量,为达到姿态高精度定向目的,在大角度机动末期,当应切换为具有连续力矩输出的设备进行姿态控制.
6 结论
针对柔性航天器大角度姿态机动时柔性附件的振动抑制问题,提出了一种闭环脉冲序列控制方法.将成形的喷气开关序列应用到姿态控制内闭环中,对每次喷气开关动作进行成形处理,在利用喷气完成闭环大角度机动时,避免激发柔性结构振动、保持机动平稳.理论和实验表明:该方法不仅使航天器快速完成高精度姿态机动,而且显著地减少了柔性结构的弹性振动,并且喷气浪费少,算法简单,易于在轨实时计算,具有很高的工程可行性和有效性.
[1]胡庆雷,马广富.基于PZT和脉冲调制控制的挠性卫星振动抑制[J].哈尔滨工业大学学报,2005,37(12):1698-1702.
[2]WIE B,SINHA R,LIU Q.Robust time-optimal control of uncertain structural dynamic systems[J].Journal of Guidance,Control,and Dynamics,1993,15(5):980-983.
[3]SINGH T,VADALI S R.Robust time-optimal control:a frequency domain approach[J].Journal of Guidance,Control,and Dynamics,1994,17(2):346 -353.
[4]SUNG Y G,SINGHOSE W E.Deflection-limiting commands for systems with velocity limits[J].Journal of Guidance,Control,and Dynamics,2008,31(3):472-478.
[5]SINGHOSE W E,BOHLKE K,SEERING W.Fuel-efficient pulse command profiles for flexible spacecraft[J].Journal of Guidance,Control,and Dynamics,1996,19(4):954-960.
[6]SINGHOSE W E,SINGER N,SEERING W.Time-optimal negative input shapers[J].Journal of Dynamic Systems,Measurement,and Control,1997,119(2):198-205.
[7]SINGHOSE W E,BIEDIGER E.Experimental verification of real-time control for flexible systems with on-off actuators[J].Journal of Dynamic Systems,Measurement,and Control,2006,128(2):287 -296.
[8]SINGHOSE W E,MILLS B W,SEERING W P.Closed-form methods for generating on-off commands for undamped flexible spacecraft[J].Journal of Guidance,Control,and Dynamics,1999,22(2):378 -382.
[9]BANG H,PARK Y,HAN J.Feedback control for slew maneuver using on-off thrusters[J].Journal of Guidance,Control,and Dynamics,1999,22(6):816 -822.
[10]SONG G B,AGRAWAL B N.Vibration suppression of the flexible spacecraft during attitude control[J].Acta Astronautica,2001,49(2):73-83.
[11]SONG G B,BUCK N V,AGRAWAL B N.Spacecraft vibration reduction using pulse-width pulse-frequency modulated input shaper[J].Journal of Guidance,Control,and Dynamics,1999,22(3):433 -440.
[12]AGRAWAL B N,BANG H.Robust closed-loop control design for spacecraft slew maneuver using thrusters[J].Journal of Guidance,Control,and Dynamics,1995,18(6):1226-1344.
[13]杨辉,洪嘉振,余征跃.一类刚-柔耦合系统的模态特性与实验研究[J].宇航学报,2002,23(2):67-72.
[14]DENG F Y,HE X S,LIANG L,et al.Dynamics modeling for a rigid-flexible coupling system with nonlinear deformation field [J].Multibody System Dynamics,2007,18(4):559-578.
[15]SINGER N C,SEERING W P.Preshaping command inputs to reduce system vibration[J].Journal of Dynamic Systems,Measurement,and Control,1990,112:76 -82.
Closed-form on-off control for large angle maneuver of flexible spacecraft
KONG Xian-ren,YANG Zheng-xian,LIAO Jun,ZHANG Ye-chi
(Research Center of Satellite Technology,Harbin Institute of Technology,150080 Harbin,China,yangzhengxian@hit.edu.cn)
A closed-form pulse train control algorithm is presented for vibration suppression of flexible spacecraft during large angle maneuver.Based on attitude angle and angular velocity,the control algorithm uses thrusters for coarse attitude control and reaction wheels for high precision attitude control at the final stage of operations.The input shaping is introduced to modulate thruster pulses with a set of properly timed impulses to suppress vibrations introduced by on-off control.Physical experiment results demonstrate that the proposed approach can significantly reduce the vibration of flexible appendages during fast large angle maneuver,and the presented control algorithm has the advantages of less fuel consumption,as well as simplicity and efficiency for practical on-board computer operation.
flexible spacecraft;large overall motions;on-off control;vibration suppression;physical experiment
O313.7
A
0367-6234(2011)11-0011-05
2010-11-29.
国家自然科学基金资助项目(60904051).
孔宪仁(1961—),男,教授,博士生导师.
(编辑 张 宏)