舰船主机自动控制装置的设计*
2011-06-06王爱民
王爱民 葛 尧
(92941部队 葫芦岛 125000)
1 引言
遥控舰船作为被攻击目标是在军事试验领域的主要用途之一,主机自动控制装置是遥控舰船自动控制系统的重要组成部分,是船只在无人遥控状态下航行时必不可少的设备之一[1]。它将接收到的变速、换向等控制指令信号转换成控制动作,实现对舰船航行的自动控制[2]。本方案设计的舰艇主机自动控制装置,适合不同舰船改装成遥控靶艇,可较好地解决新遥控靶艇研制、建造周期长、经费高,无法满足使用需求的难题,也可提高退役舰艇的利用率,达到减低费用的目的。
主机自动控制装置的工作原理是当主机自动控制装置的主机控制器接收到中心控制设备发出的控制指令后,对送来的控制信号做出判断和反应,并通过执行器完成主机的变速、换向等相应动作。
装置的主要功能是:1)具有控制主机自动变速、自动换向、自动连锁和自动保护功能;2)装置与遥控终端间能够进行定时联络,在信号长时间中断后,主机控制装置自动进入程序保护状态,信号恢复接收后,重新进入受控状态;3)能够自动采集靶艇运动航向、航速和当前位置信息并送回中心计算机显示、形成数据库文件;4)系统具备可扩充功能,并能转入手动操控[3~4]。
2 主机自动控制装置的设计
主机自动控制装置主要由PLC控制器、执行器等部分组成。PLC控制器主要完成遥控指令的接收和处理并送给执行器;执行器是一个位置控制装置,主要包括换向、变速装置两部分,它的作用是把PLC送来的动作信息通过传动机构控制主机变速和换向拉杆,以实现对主机的自动控制。
2.1 PLC控制器
PLC控制器主要包括CPU模块、电源模块和功能模块,通过接收遥控指令,经PLC控制器译码和处理后发送给执行器,执行相应动作[5~6]。
主机的控制指令多,逻辑复杂。选用可编程控制器(PLC)来完成各种逻辑控制,是因为它具有以下特点:1)可靠性高。因为它采用微电子技术,大量的开关动作由无触点的半导体电路完成,在设计中采用一系列硬件和软件抗干扰措施,有效地抑制了外部干扰。2)应用灵活。由于PLC实现了产品的标准化、标准的积木式硬件结构和单元化的软件设计,使它既可适应复杂功能的控制要求,又适应各种工艺流程变更较多的场合。3)功能强、通用性好。PLC不仅具有逻辑运算、定时、计数、顺序控制等功能,而且还具有A/D、D/A转换、数值运算、数据处理和通讯联网等功能。4)编程简单。大多数PLC采用梯形图编程方式。梯形图与传统的继电器接触控制线路图有许多相似之处,与常用的计算机语言相比更容易被操作者掌握[7~9]。
为了保证主控制器的可靠性,主控制器采用高可靠性的OMRON CJ1系列PLC作为主控部件。对操纵杆进行控制的执行元件为直流力矩电机,下面简述直流力矩电机PLC控制方案[10~11]。
在操纵杆行程范围内放置一定数量的位置检测元件,图1为直流力矩电机控制原理图,图中以3个元件为例,分别为SB1、SB2和SB3。对电机的控制一共采用4个继电器,分别为KM1、KM2、KM3和KM4。
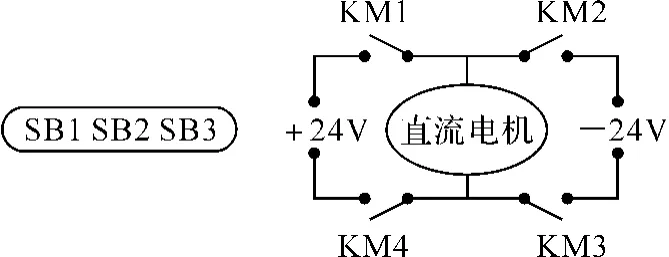
图1 直流力矩电机控制原理图
当电机正转时,操纵杆从左至右移动;电机反转时,从右至左移动。如从SB1移动至SB3,KM1和KM3首先接通,电机正转,到达SB3后全部继电器断开,电机停止,如在需要从SB3移动至SB2,则KM2和KM4接通,电机反转,到达SB2后全部继电器断开,电机停止。
2.2 控制器
控制器由变速和换向装置两部分组成。其设计的主要目的就是要把变速和换向的手动操纵改为自动操纵并保持原有手动功能。
通过调研了解,现有舰船的手动操控装置虽形式各异,但其结构可归纳为图2(a)、2(b)两种,即均是通过人工扳动换向、变速杆实现舰船航向、速度的变换。两种操纵杆结构形式的区别在于图2(a)中的换向杆仅控制前进和后退,图2(b)中的换向杆不仅控制舰船的前进和后退,还控制主机启动和停机。本设计基于微计算机技术的主机自动控制方案,通过使用高可靠性、高稳定性的集成元件和机械设计满足主机的自动换向和变速控制功能。由于图2(a)中变速杆和换向杆与图2(b)中的变速杆结构类似,控制方式一致,因此,下文中主要以实现图2(b)自动控制的结构设计为主,左图中的变速杆和换向杆可利用图2(b)中的自动变速装置实现其自动控制功能。
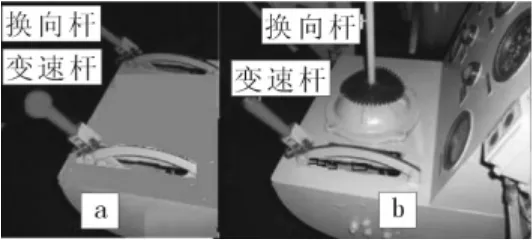
图2 舰船两种主机变速、换向操纵装置示意图
2.2.1 换向控制器
新设计的换向控制器由直流力矩电机(正反运动)、联轴器、蜗杆减速器、齿条、拉杆和齿轮等组成,实现主机启动、停机、前进和后退。
1)原主机换向杆操纵原理
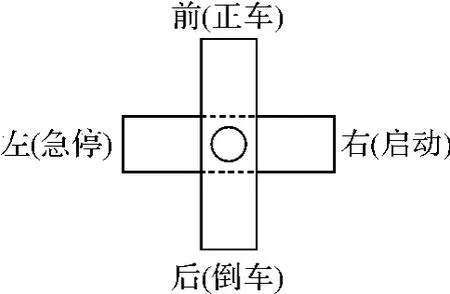
图3 “十”字滑槽
原艇主机换向杆操纵由人工控制。换向杆共有5个位置,如图3所示,即中间位置、启动位置、停车位置、正车位置和倒车位置。这5个位置是换向杆在一个“十”字滑槽中所处的位置,从操纵杆上方位置看,中间位置向右摆动为启动,向左摆动为停车,向前推为正车,向后拉为倒车。
2)换向控制器自动操纵原理
新设计的换向控制器保留原手动操纵机构,增加自动操纵机构。自动操纵机构和原手动操纵过程类似,即通过两套相同的齿轮—齿条拉杆机构将原换向杆手动左右摆动和前推后拉改为由传动机构自动左右摆动和前后推拉。
换向控制器的结构、原理如图4所示,其中两个拉杆设计在相互平行的两个平面中。简要工作原理是直流力矩电机(1)驱动蜗杆(3),经减速后驱动蜗轮低速空间交错轴输出,在蜗轮输出轴上固联的直齿轮拖动齿条(4)横向水平移动。与齿条(4)刚性联接的启、停拉杆作横向移动,拉杆(5)的端部固联具有纵向导槽的拖板,拖板导槽的宽度切于操纵杆外径。电机的正反转动,通过齿轮(13)推动齿条(4)即拉杆(5)作左右直线移动,达左右死点处,将由杆(5)的端部导槽推动操纵杆达停车、启动位置。当拉杆5作横向平移时,拉杆7端部的导槽(水平向)便是操纵杆6的水平导轨。同理,电机11驱动蜗杆减速器10、齿轮9正反转动时,齿条8将作上下纵向平移,通过拉杆7端部的水平向导槽拉动操纵杆作纵向位移,达上下死点时,为正倒车的控制位置。当两套系统运动时,可实现操纵杆的启动—正车、启动—倒车等复合运动。

图4 换向控制器安装位置示意图
换向控制器共两套,其中一套安装在图4的十字滑槽左右滑槽的左端外侧,且拨杆较短,拨杆从中间向右摆动到位,即是启动位置;向左摆动到位即是停车位置。另一套安装在图4的十字滑槽前后滑槽的后端外侧,且拨杆较长,拨杆从中间位置向前摆动到位,即是正车位置,向后摆动到位即是倒车位置。两套机构安装在座板上,再将座板安装到操作面板上。两套机构互相垂直放置,拨杆长短不一,互不干涉。
拨杆的运动由直流力矩电机经蜗轮蜗杆减速器传至输出轴,输出轴经键连接带动拨杆转动,以摆动到所需角度。
3)主要技术参数的选择与核算
(1)几何参数
齿轮齿数Z=23
模数m=2mm
齿高系数h*α=1mm
变位系数x=0
齿条有效长度L=150mm
宽度b=13mm
蜗杆减速器型号:NRV30-30
当电机转速nd=1400r/min
蜗轮输出转速nd=1400r/min
输入功率Pw1=0.18KW
输出扭矩T2=24Nm
选直流力矩电机55LYX04
峰值堵转时:0.84Nm
空载最大转速n0max=1500r/min
按NRV减速器输出扭矩T2计算直齿轮额定输出的切向力


当蜗杆减速器传动比i=30时,则电机转速为n1

取直流力矩电机按0.7Nm输出转矩,系统效率η=0.5时,则直齿轮将获得输出力矩为:

此时拖动切向力Ft=807N
摆动速度:1~2s
2.2.2 变速控制器
1)原主机换变速操纵原理
设齿条线速度为v2=100mm/s时,则齿轮的转速为(蜗轮转速n2)
原艇主机油门杆操纵由人工控制。油门杆共有4个位置,即正车低速、中速、高速,倒车低速,这4个位置是油门杆在一个“一”字滑槽(见图5)中所处的位置,从操纵杆位置看,从左向右逐渐加速。

图5 一字滑槽图

图6 解脱自锁机构
2)变速控制器自动操纵原理
变速控制器由电机、减速器和拨杆等组成,实现主机低速、中速、高速、全速控制。其组成和工作原理和换向控制器相同,不再赘述。改装后保留原手动操纵机构,增加自动操纵机构。
原手动操纵杆可以在任意位置自锁定位,当改为自动控制时必须解脱自锁,才能完成自动控制,而其锁紧功能改由减速器提供,因此,特设计了一个解锁套,并将其用螺钉拧紧在手动操作柄座上,当需要自动控制时,只需将手动操作柄上的自锁按钮按下,即可解脱自锁,完成速度的自动控制。解脱自锁机构如图6所示。
3 结语
设计的主机自动控制装置利用软硬件结合的方法,采用成熟技术,试验结果证明:具有体积小、重量轻、安装控制方便、使用灵活和实用性强的特点,适合多种舰船的改装。
[1]杨榜林,岳全发.军事装备试验学[M].北京:国防工业出版社,2002,9
[2]王文斌等.海军装备试验靶标技术[M].北京:国防工业出版社,2007,4
[3]王爱民,苏德章,葛尧.活动靶艇无线电遥控系统的研制与应用[J].无线电工程,2008(2)
[4]王爱民,申良生,苏德章.靶船方位自动调整系统的设计与实现[J].战术导弹技术,2008(4)
[5]宫叔贞,王冬青.可编程控制器原理及应用[M].北京:人民邮电出版社,2002,7
[6]万福君.单片微机原理系统设计与应用开发[M].合肥:中国科技大学出版社,1995,6
[7]杨清峰,付骞.可编程控制器原理及应用[M].西安:西安电子科技大学出版社,2010,3
[8]夏辛明,黄鸿,高岩.可编程控制器技术及应用[M].北京:北京理工大学出版社,2005,10
[9]孙振强.可编程控制器原理及应用教程[M].北京:人民邮电出版社,2009,7
[10]西安交通大学.控制电机[M].北京:国防工业出版社,1979,7
[11][日]版本正文.步进电机应用技术[M].北京:科学出版社,2010,5
