船载多传感器组合定位系统设计与实现*
2011-06-06李慧丽
李慧丽 黄 伟 赵 恒
(武汉数字工程研究所 武汉 430074)
1 引言
随着船舶定位技术的发展,定位设备的种类越来越多,定位系统的种类越来越多,如全球定位系统(Global Position System,简称GPS)、罗兰C无线电定位系统(Loran C)、惯性导航系统(Inertial Navigation System,简称INS)、船位推算系统(Dead Reckoning System,简 称 DRS)、多 普 勒(Doppler)测速系统以及电子海图显示与信息系统(Electronic Chart Display and Information Sys-tem,简称ECDIS)等[1],单一的使用某种定位系统在性能上都存在着局限性,难以满足船舶航行的可靠性要求,对自主性、可靠性以及精度性要求高的船舶导航应用场合,尤其是军用场合,需要定位系统可以运用现代信息融合技术充分利用船载多种设备,实现设备管理和信息集成,以获得更高的定位精度和可靠性。
文章研究设计了基于电子海图的多传感器组合定位系统。该系统以电子海图系统为平台,优化配置船载多种传感器设备,采用GPS和DR组合定位技术,实现了船舶的可靠性定位。利用信息融合技术综合处理传感器数据,得到船舶最佳的定位信息,通过电子海图实时动态地显示船舶的综合航行态势,从而构成高可靠性、多功能的船舶组合定位系统。
2 系统的结构组成和基本工作原理
2.1 结构组成
系统实时采集船载传感器的报文并进行解析,利用融合策略处理各类定位数据,以电子海图作为定位、监控和指挥的平台,在电子海图上实现了对航行中船舶的精确定位和对船载多传感器的可视化管理,结构图如图1所示。

图1 定位系统结构图
其中,传感器管理模块管理多源异质的传感器,所谓多源异质是指数据来源于多个不同类型的传感器[2],该模块实现了将船载多源异质传感器接入系统进行串口绑定并实现分类管理的功能;传感器数据采集模块主要完成对各个传感器报文的接收以及预处理,通过对报文进行解析,剔除不完整数据,保留有效的数据;航迹推算模块主要是用推算算法进行下一时刻的船位推算;定位数据组合处理模块是组合定位系统的关键部分,它是将多个数据源的数据通过融合策略将它们融合到一起,从而提高系统的准确性和鲁棒性;电子海图系统作为本系统的显示平台,主要是实时更新当前船舶的态势,并对各类设备的状态、定位数据以及船舶航行状态进行监控,做出相应的告警提示,提醒操作人员注意。
2.2 定位原理
DGPS以及GPS定位系统具有全球全天候高精度连续定位能力,以及操作使用方便、自动化程度高、可靠性高和费用低廉等优点[3],但是其信号容易受到其他信号的干扰以及卫星星历误差和卫星信号延迟的影响[4]。所以本系统使用以DGPS为首的位置传感器作为主用定位设备。在其出现设备故障或者数据无效的情况下,系统主动采用其他船用传感器如罗经(GYRO)、计程仪(LOG)等的定位定向数据或者人工观测的定位定向数据,使用船位推算(Dead reckoning,简称DR)进行辅助定位,进而实现系统的高可靠性定位。
DR作为一种先进的自主式定位方法,其实现导航定位的原理却是比较简单的:以起航点或观测船位为推算起始点,根据船舶最基本的航海仪器(GYRO和LOG)所指示的航向、航程以及船舶的操纵要素和风流要素等,在不借助外界导航物标的条件下,推算出具有一定精度的航迹和船位[5],在2D平面内,其推算方程[5]如式(1)所示。

式中,X0、Y0表示推算起点的位置,Si表示Ti-1时刻到Ti时刻船舶行使距离,θi表示Ti-1时刻到Ti时刻船舶行使航迹向,TC表示真航向,γ表示风流压差,它等于风压差与流压差的代数和。
由式(1)可以看出,虽然DR可以完全自主的进行定位,但是定位精度都取决于传感器的测量精度,当航向信息的精度较差时,DR推算出来的船舶航迹将很快地偏离实际行使的轨迹;而且随着时间的推移,测量误差以及计算误差将会递增,精确度从而也呈现出递减趋势,因此,单独的船位推算系统不宜进行长时间的单独定位。
系统利用GPS具有长时间绝对定位的稳定性,而DR具有短时间相对定位的稳定性的特点,一方面当GPS观测卫星数较多、卫星几何分布结构较好时工作于GPS模式,同时利用GPS精确的定位结果辅助DR的初始化;另一方面,一旦GPS出现设备故障或者定位数据无效时,系统又可以自动地切换到DR导航方式,直至GPS恢复正常状态。采用这种组合定位方式可以大大提高导航的安全性和系统的可靠性。
3 关键设计的实现
系统主要由系统初始化模块、串行通讯模块、数据采集模块、数据组合处理模块以及数据显示模块等几部分组成。在实现过程中,需要解决一些关键技术,例如多源异质传感器的管理,以及定位信息的解析以及组合处理等。本文就以下两方面对系统具体实现过程做出论述。
3.1 多传感器管理
通常情况下,船上一般都载有多个定位用传感器设备,如何管理这些传感器资源,最大化其利用率以更好的为导航服务,具有重要的意义。系统将各种定位相关传感器设备按其用途来划分,分为以下四大类,分别是:
1)位置源传感器:能够提供本船定位信息(包括地理位置、航速航向等信息)的传感器,比如Loran-C、GPS、DGPS等。
2)航速源传感器:能够提供本船航速信息的传感器,比如LOG。
3)航向源传感器:能够提供本船航向信息的传感器,比如GYRO。
4)其它类传感器:不直接提供本船航速航向或者位置信息,但在本船定位过程中要参考价值的传感器,例如测深仪、风速风向仪等。
为了实现可靠性定位,对位置源传感器、航速源传感器、以及航向源传感器进行双配置,形成冗余备份。在这几类设备接入系统的同时进行优先级指定,规定它们中只能有一个主用设备,另外一个作为备用设备,在主用设备完好的情况下,系统采用主用设备的输出进行本船定位,同时根据两个设备的精度,设定一个阈值,该阈值用于监测主备用设备的输出值差异,当主备用设备输出差异大于设定的阈值时,提醒操作人员注意,以此来监测两个设备是否工作在正常状态,当确定主用设备出现故障时,可以提高备用设备的优先级,从备用改为主用。
3.2 数据处理过程
系统在运行过程中可能在同一时间会收到来自多个传感器的多条报文,对于数据的采集和解析是影响整个系统效率和可靠性的重要因素。根据国际电工委员会制定的IEC61162-1协议,在程序中定义个11个与常用定位相关语句相对应的语句结构体,语句归纳详见表1所示。串口接收线程将获取到的数据按照协议提取,保留符合标准的完整语句,抛弃不完整的语句;信息解析线程将这些语句解析后分类放入相应的结构体内;数据融合处理线程对数据进行融合处理,然后分发给界面以及外部设备。
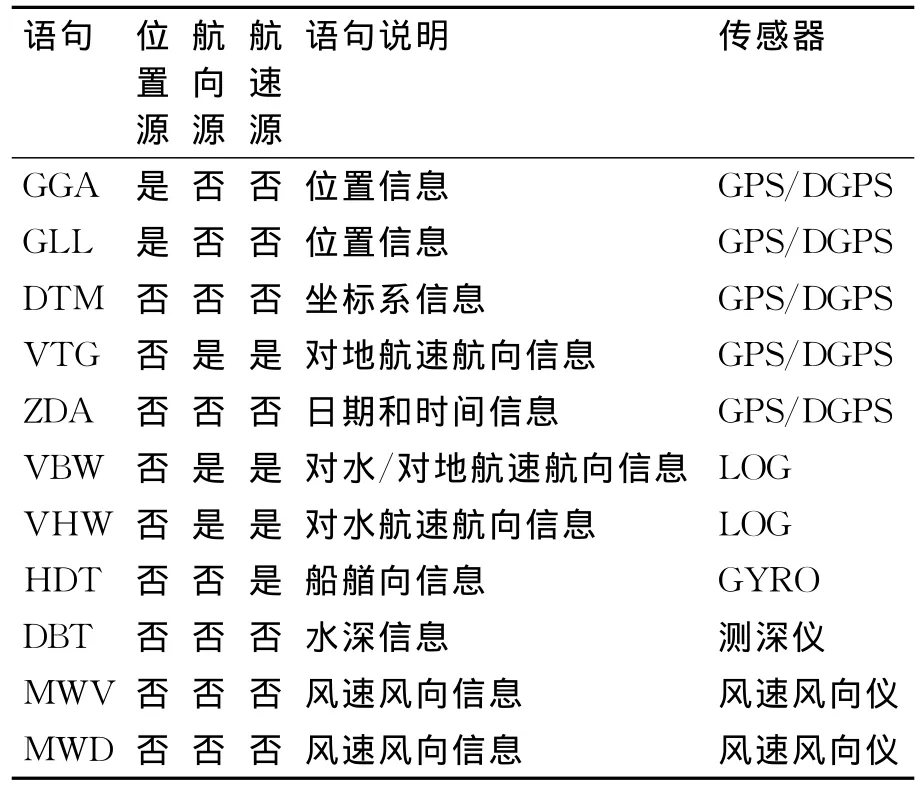
表1 定位相关语句
信号在传输和接收过程中不可避免的要受到噪声的干扰或污染,在量测过程中也不可避免的要引入一定的量测噪声,这些都使模型的定位精度降低,为了提供船舶的定位精度,系统采用了Kalman滤波算法,对所有可操作的定位传感器提供的位置信息进行滤波处理,为本船提供平滑过渡的位置信息。同时将此信息连同航速航向信息,更新DR模块的本船的定位信息,以作备用。
数据处理过程自动识别传感器是否工作在正常状态,若均工作在正常状态,则进行融合,若其中某个传感器暂时失效,则抛弃其受污染的数据,依照一系列判断逻辑,采用可用的且精度最高的传感器的数据,进行船舶定位,来提高系统输出数据的精确性和整个系统的健壮性。其中,位置信息自动识别过程如图2所示。

图2位置信息自动识别过程逻辑框图
航速航向信息的自动识别过程如图3所示,DGPS、GPS所获取的对地航速、对地航向具有最高的优先级,当这两类传感器无效的时候,次之选择LOG提供的对地航速航向,如果LOG也无效,则先选择采用人工设置的设置的航速、航向,最低优先级采用LOG提供的对水航速以及GYRO提供的本船航向信息。

图3航速航向信息自动识别过程逻辑框图
4 试验结果与分析
使用综合船桥通导设备集成模拟器进行仿真实验,实验配备两个GPS,两个LOG,两个GYRO,噪音比率统一设置为5%。设计一条计划航路,确定14个参考点,以检验组合定位系统的精度,航路起始点位置为北纬29°57′36″,西经121°59′57″,终止点位置为北纬29°39′56″,西经122°34′45″,全长39.20海里。

图4 定位设备完好情况下系统误差统计
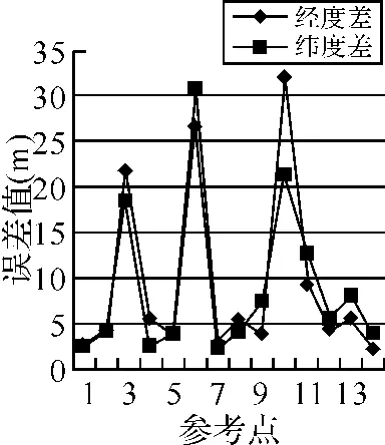
图5 GPS失效情况下使用LOG、GYRO进行DR定位误差统计
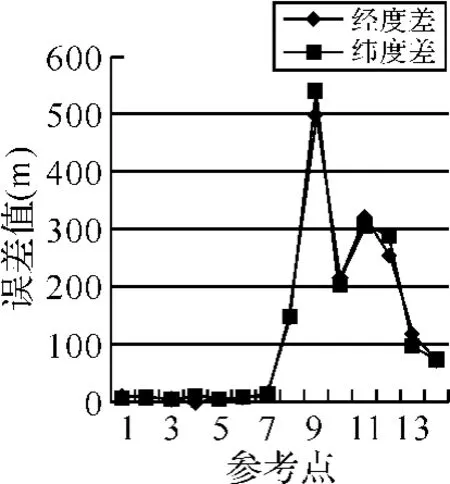
图6 定位设备失效时使用人工输入进行DR定位误差统计
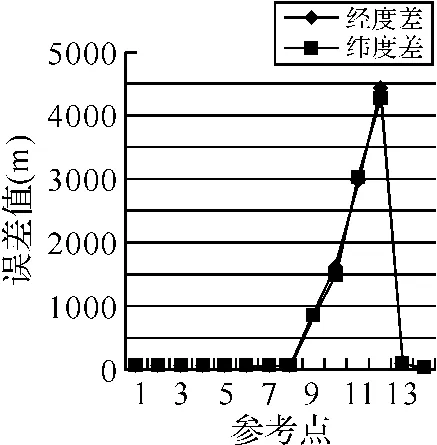
图7 定位设备失效时利用惯性DR定位误差统计
采集四组实验数据,分别对应四种定位模式:1)模式为GPS、LOG、GYRO都正常工作,组合定位系统经纬度误差见图4所示;2)为定位过程中有几段时间内GPS工作失效,进行DR定位,推算用数据由LOG、GYRO提供,组合定位系统经纬度误差见图5所示;3)为定位过程中一段时间以后GPS、LOG、GYRO相继失效,进行DR定位,推算用数据由人工调整输入提供,组合定位系统经纬度误差见图6所示;4)为定位过程中一段时间内GPS、LOG、GYRO相继失效,根据惯性定律,进行DR定位,推算用数据采用定位设备最新更新的船舶定位数据,组合定位系统定位经纬度误差见图7所示。
由图4可知,定位设备完好的情况下,系统误差最低,在图5、图6以及图7中,波峰所在的位置即为定位设备失效以后一段时间,由图可知,GPS具有最高的定位性能;LOG、GYRO由于不提供位置数据,所以只能减缓GPS失效时组合定位系统误差的发散;人工输入DR用推算起点、航速航向,因主观差异性比较大,定位误差的浮动比较大,与操作者的个人经验有很大的关系;而依据设备失效时所得的最新的定位数据进行惯性推算定位,在短期内能保持系统的定位精度,但是随着时间的推进,误差会递增,当GPS再次可用时,位置误差才可以得到校正。所以,在实际使用中,根据特定情况,不同组合定位方式的快速切换,可以在一定程度上保障航行的安全,同时为设备维修争取了时间。
5 结语
该组合定位系统将船载多种定位传感器如GPS、DGPS、LOG、GYRO等同电子海图,船位推算有机地结合起来,充分利用了GPS和DR的互补作用。论文详细介绍了定位系统的基本原理以及实现过程中的关键设计,通过仿真实验,比较了系统提供的四种定位模式下的定位精度,验证了该设计思路的简单可行性以及该组合定位系统能一定程度上提高航行的可靠性和精度。
[1]韩剑辉,许镇琳,赵承利,等.船舶综合导航系统应用技术[J].天津大学学报,2010,43(2):121~125
[2]刘效武,王慧强,梁颖,等.基于异质多传感器融合的网络安全态势感知模型[J].计算机科学,2008,35(8):69~73
[3]饶滚金,徐海蓉.GPS不能作为惟一的导航定位设备[J].世界海运,2003,26(3):48~49
[4]汤文钰.GPS误差对船舶定位的影响及措施[J].中国水运,2009,9(4):16~17
[5]高玉德.航海学[M].大连海事大学出版社,2003:246~262
[6]刘严岩.多传感器数据融合中几个关键技术的研究[D].中国科技大学,2006,5
[7]彭燕.无线传感器网络定位优化算法及其仿真[J].计算机与数字工程,2011,39(3)
[8]李建,韩忠.无线传感器网络定位技术探析[J].计算机与数字工程,2010,39(5)
[9]XU Hai-feng,Research on GPS/DR/MM Integrated Navigation Positioning Algorithm For Vehicle[J].Computer Applications and Software,2008,25(10):144~147
[10]FURUNO OPERATOR'S MANUAL-Electronic Chart Display and Information System[G].FURUNO ELECTRIC CO.LTD.,2008
[11]IEC 61162-1Ed.3-2007.4Maritime navigation and radiocommunication equipment and systems-Digital interfaces[S].International Electrotechnical Commission,2007
