气动肌肉驱动步态康复训练外骨骼装置的研究
2011-06-05隋立明张立勋
隋立明,张立勋
(哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001)
在脑卒中病人的康复过程中,运动和步行能力的康复占有十分重要的地位.在卒中病人的步态康复训练中,减重运动平板训练由于其灵活的方式、不受场地限制以及训练过程中能够对病人神经系统产生有益刺激等优点而得到广泛的应用.由于脑卒中病人在行走过程中存在由于运动神经元损伤导致的异常运动模式以及肌肉无力等情况,为对步态进行矫正,在训练过程中,治疗师需要帮助病人以正确的姿态进行运动.因此,在卒中病人的平板训练过程中,往往需要两个治疗师帮助病人以正常的方式运动下肢,体力消耗很大.
为减轻治疗师的工作强度,提高训练的效果,专业化的步态康复机器人开始出现.目前应用和研究比较广泛的是在运动平板上的机器人辅助康复训练系统[1],比较著名的像瑞士研制的Lokomat康复训练机器人以及美国特拉华大学研制的ALEX步态康复训练系统[2-3].此外,德国夫琅和费研究所也研制了各种基于足轨迹控制的各种步态康复训练机器人[4].以上康复训练机器人的基本思想都是靠一定的装置来带动病人的下肢产生接近正常步行的运动,从而减轻了治疗师的体力活动.此外,韩国还研究了能够进行上楼梯训练的康复机器人[5].在步态训练机器人中,下肢的助力是一个很关键的问题.在各种下肢的助力方式中,穿戴式外骨骼装置是一种比较理想的方式[6].在外骨骼研究中,比较著名的有美国的BLEEX主要用于士兵的负重行走,RoboKnee用于普通的助行和康复训练[7-8].日本研究的HAL外骨骼装置既能用于正常人的助力又能用于偏瘫病人的助行等场合[9].用于步态训练的外骨骼装置需要解决的问题包括装置的轻型化、柔顺性和人机协调.
本文基于人体肌肉驱动下肢的原理,根据正常步行中的下肢运动规律,设计并制作了步态康复训练外骨骼装置.装置采用气动肌肉进行驱动,解决了轻便和柔顺性的问题.对该装置的驱动模型进行了分析,并对装置进行了初步实验.
1 人体步态基本分析
人体步行是一个由神经、骨骼与肌肉参与的复杂的运动.在一个步态周期,根据下肢足和地面的接触情况,正常步行可以分为支撑期和摆动期.支撑期从足跟着地开始,然后足要经历足平放和跟离地2个阶段(如图1所示).而在临床上,常采用RLA法对一个步态周期进行更具体的划分[7].从功能角度来说,步行的主要作用就是身体的前移,而其前提是保持姿态的稳定.在步行中,姿态的稳定通过合理规划足的着地点轨迹来实现.
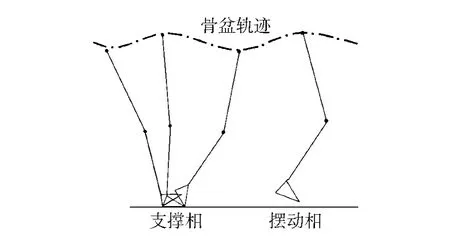
图1 下肢运动示意Fig.1 Schematic of low limb movement
在人的正常步行过程中,人体骨盆或重心的轨迹在矢状面呈现正弦曲线的形式(如图1所示).而髋关节、膝关节和踝关节在一个步态周期的角度变化规律如图2所示.在一个步态周期,髋关节的角度变化呈现近似正弦变化规律.而膝关节与踝关节通过互相配合与协调,来实现重心的轨迹变化平滑、幅度小,从而达到较低的步行能量消耗.由于人体行走的姿态主要是由各关节的运动所决定,因此,通过对下肢各关节运动的控制就可以达到对人体正常步行姿态的控制.为此,提出了人体步行姿态控制模型.该模型也作为后面康复训练系统的控制模型.该模型基本结构如图3所示.模型中,Gp代表重心轨迹和2个足轨迹之间的函数关系,Gf代表足的运动轨迹与髋关节和膝关节运动角度之间的函数关系,Gh代表肌肉驱动关节的模型,Gt代表髋关节和膝关节角度与实际足轨迹之间的函数关系,相当于Gf的逆模型,Gq代表两足轨迹与重心轨迹的函数关系,相当于Gp的逆模型.整个模型的输出为步行过程中实际的重心轨迹.
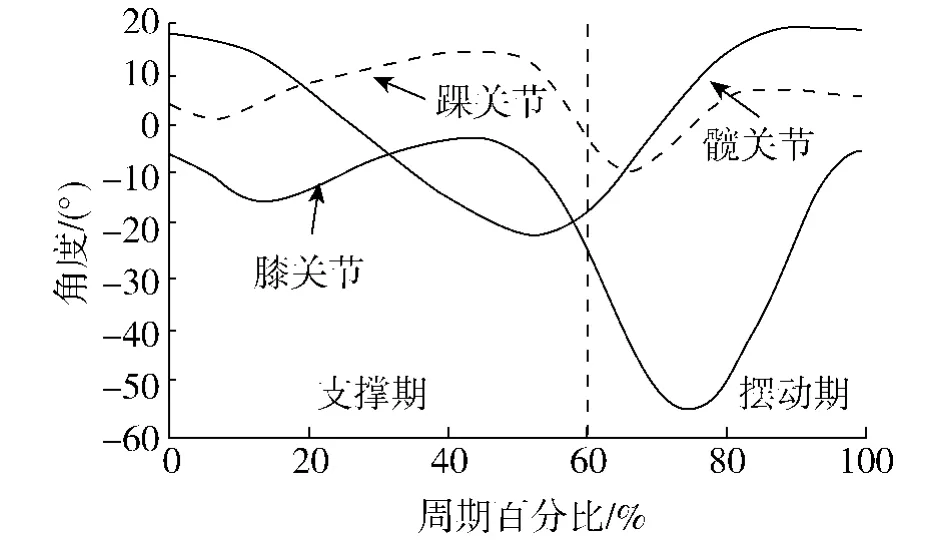
图2 一个步态周期下肢关节的角度Fig.2 Joint angles in a gait cycle
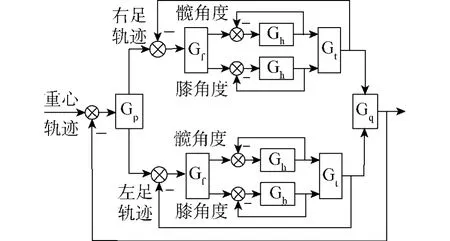
图3 下肢步行姿态控制模型Fig.3 Model of the low limb gait control
在该模型中,以人体骨盆(或重心)的轨迹作为步行姿态的表示.正常步态时人体重心的轨迹和两足的运动轨迹之间有明确的对应关系.而从下肢二连杆的角度看,两足的运动轨迹又由髋关节的角度和膝关节的角度决定.对于每个关节来说,可以看作是以肌肉做为驱动的最基本的闭环系统,其输入为期望的关节角度,输出为实际关节角度.在图3中,每个比较器的输入信号都是期望信号.
因此,步态的控制从顶层的角度看,可以认为是对人体行走重心的控制,使得行走达到稳定、高效的目的;而从底层的角度看,是通过肌肉对下肢各关节的角度控制达到控制人体步态的目的.
2 基于外骨骼方式的步态康复策略
由于正常的步行由神经、肌肉与骨骼等多个系统参与,因此任何一个方面出现问题都会对步态有影响.脑卒中病人在大脑发生损伤后,其皮层运动神经元所支配的随意运动丧失,而脊髓神经元所支配的原始反射运动模式得到释放,因此导致各种异常运动模式的发生,例如步行中的各种偏瘫步态.步态康复训练的主要目的是通过患者主动反复地运动偏瘫下肢从而促进随意运动、协调反射运动和引导节律性运动[10].
由于在步态训练过程中,病人的肌肉出力不足,而且可能会产生各种异常姿态,因此,步态训练过程中需要解决助力问题以及对下肢关节非正常姿态的矫形.为此,我们提出采用动力式外骨骼方式完成这个功能.
外骨骼方式的训练既可以在平地上又可以在运动平板上进行,相比传统的减重运动平板训练,采用外骨骼方式可以提供更多的训练方式.采用外骨骼可以有如下几种训练方式.
1)被动式运动训练.被动式训练时,外骨骼装置是运动的主体,人跟随或者被动地由外骨骼装置带动进行下肢的步态训练.在这种方式下,康复训练系统的输入信号是预先规定的运动轨迹,而外骨骼康复系统要能够对任何偏离轨迹的运动进行矫正.
2)主动式助力矫形运动训练.以人作为运动的主体,外骨骼装置提供一定的助力.当人的下肢运动出现大的偏差时,外骨骼装置能提供一定的矫正力矩.该方式下,外骨骼装置需要跟随下肢关节的运动,因此控制系统需要保证下肢和外骨骼装置的协调运动.
3)主动式抗阻运动训练.该方式主要在康复的后期阶段采用.病人在具备了一定的行走能力后,带动外骨骼装置进行步态训练.外骨骼装置在跟随下肢运动的同时,提供一定的负载阻抗转矩,从而加强病人肌力的锻炼,进一步提高康复训练的效果.
从以上分析可以看出,采用外骨骼方式可以针对步态康复的不同阶段而采用相应的训练方法,功能灵活,适应性强.而为实现上述的各种功能,外骨骼装置除了能够实现位置控制外,还应该实现关节的转矩或刚度控制.因此,对外骨骼装置的驱动器也提出了一定的要求.
3 外骨骼装置的结构设计
为满足步态康复训练的要求,确定外骨骼助力装置的设计原则如下:
1)能够实现髋关节和膝关节的驱动;
2)结构简单,重量尽可能轻便;
3)使用安全,具有一定的柔顺性;
4)穿戴方便,调整简单,成本较低.
根据以上原则,选择气动肌肉作为外骨骼装置的驱动器[11].气动肌肉不仅具有重量轻、出力大等优点,而且其工作方式类似人体骨骼肌,因此可以采用一对气动肌肉以主动肌-拮抗肌的方式驱动关节(如图4所示).以这种方式驱动关节,关节位置可以开环进行控制,而且关节的位置和刚度能够独立进行控制[12].此外,由于气动肌肉的收缩存在一个极限,因此,只要合理进行参数的设计,可以避免关节出现过度转动的危险.
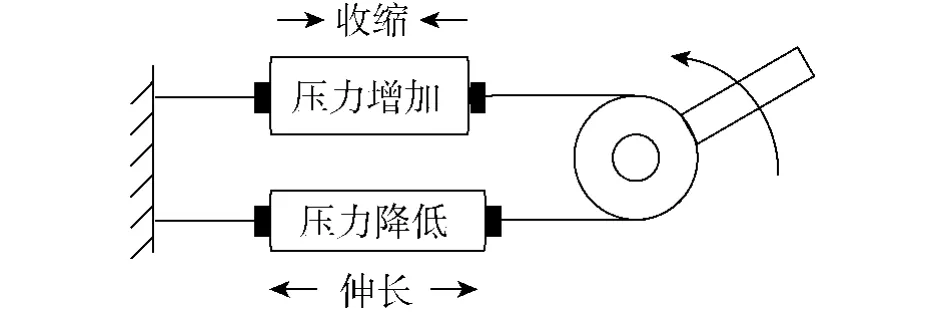
图4 气动肌肉驱动关节原理Fig.4 Principle of pneumatic muscles actuated joint
根据气动肌肉驱动关节原理,在外骨骼装置的设计中,采用了分别以一对气动肌肉来驱动外骨骼装置的髋关节和膝关节的机构方案.为保证装置结构紧凑,驱动髋关节的气动肌肉布置在大腿侧面,驱动膝关节的气动肌肉布置在小腿侧面.其布置方式和人体大腿肌和小腿肌的布置方式相似.所设计的外骨骼装置的机构如图5所示.
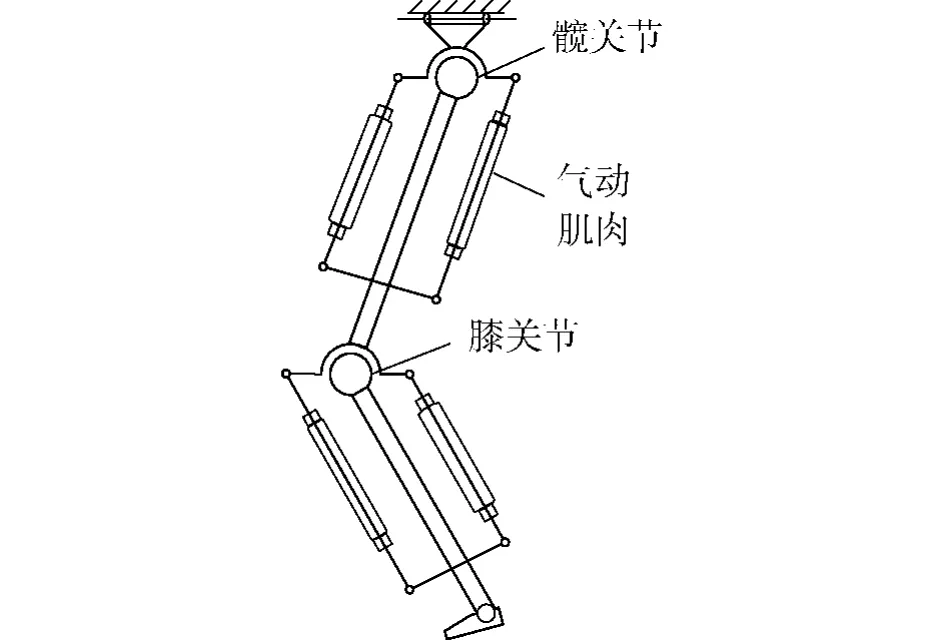
图5 外骨骼装置示意Fig.5 Schematics of exoskeleton
为保证装置整体重量较轻,其大小腿部位的支架采用空心管,而各关节采用铝材制作.在腰部、大腿和小腿分别设置了绑带,用于将装置固定于身体相应部位.为保证适应于不同腿长的人,装置的长度可以进行调整.同时,在髋关节和膝关节分别安装了编码器,以进行角度的测量.
该外骨骼装置的气动肌肉采用自行制作的气动肌肉.气动肌肉长度可以根据装置具体参数进行调整,同时气动肌肉的两端接头采用铝材,因此其重量很轻.图6为自行制作的气动肌肉及其充气后的照片.
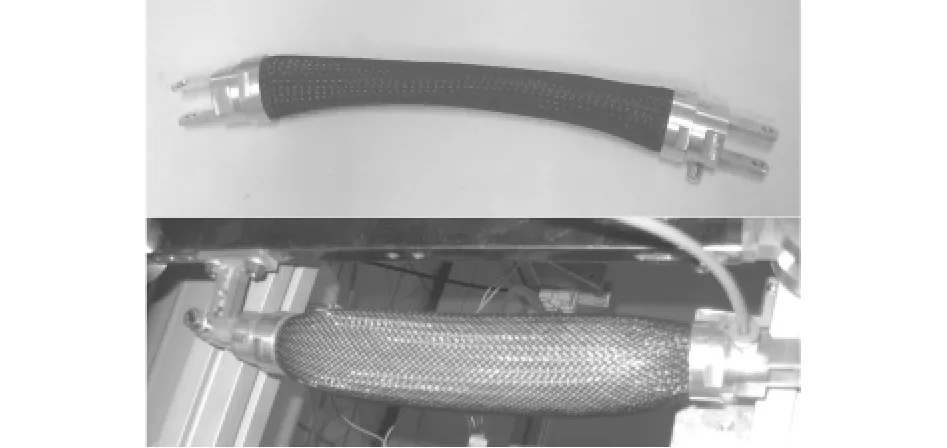
图6 气动肌肉Fig.6 Pneumatic muscles
4 外骨骼装置的驱动模型
为得到外骨骼装置的驱动模型,首先需要得到气动肌肉的模型.气动肌肉的理论模型比较复杂且不便于应用[13].因此,根据气动肌肉的等压特性并进行线性拟合,将气动肌肉的特性用如下公式表示[9]:

式中,F为气动肌肉张力,L为气动肌肉可变形长度,p为气动肌肉压力,a和b为拟合系数.
设外骨骼关节在初始状态时,2个气动肌肉的初始压力分别为 p10和 p20,初始长度分别为 L10和L20,初始外转矩为M0,关节半径为r.
根据力矩平衡方程,可以得到关节在气动肌肉的输入变化压力分别为Δp1和Δp2时,关节转角θ和外转矩M之间的关系为

式(2)是一个通用公式,适用于气动肌肉的压力任意变化时的情况.
在实际应用过程中,2个气动肌肉的压力经常采用等值反向变化方式,即

而若2个气动肌肉的初始长度也取相等时,即

则在这种情况下,式(2)可进一步简化为

将式(5)进行变换,则可以得到将外骨骼关节从初始位置驱动到终止位置所需的气动肌肉的压力变化为

其中:ΔM=M-M0,

由式(6)可见,气动肌肉将关节从初始位置驱动到终止位置所需要的压力变化一部分用于克服负载转矩的增量变化,另一部分用于将关节驱动到一定位置.若负载转矩保持恒定,则气动肌肉的压力变化和关节的转角呈线性关系.
式(5)中的负载转矩需要针对不同的训练方式来给定.对于被动式训练,若外骨骼装置提供下肢全部的驱动力矩,则外骨骼的负载转矩就是正常步态下人体各关节的驱动力矩.对于抗阻训练,则负载转矩的符号和主动式训练的情况正好相反.
5 外骨骼装置实验
为测试所设计的步态康复训练外骨骼装置的有效性,进行了初步的实验.实验由正常人穿戴上外骨骼装置并在运动平板上进行.
实验系统原理图如图7所示.整个实验系统以工控机作为上位机,采用dSPACE实时仿真系统进行信号的转换与处理.每个气动肌肉的压力用比例压力阀进行控制,髋关节和膝关节的角度用编码器进行检测.
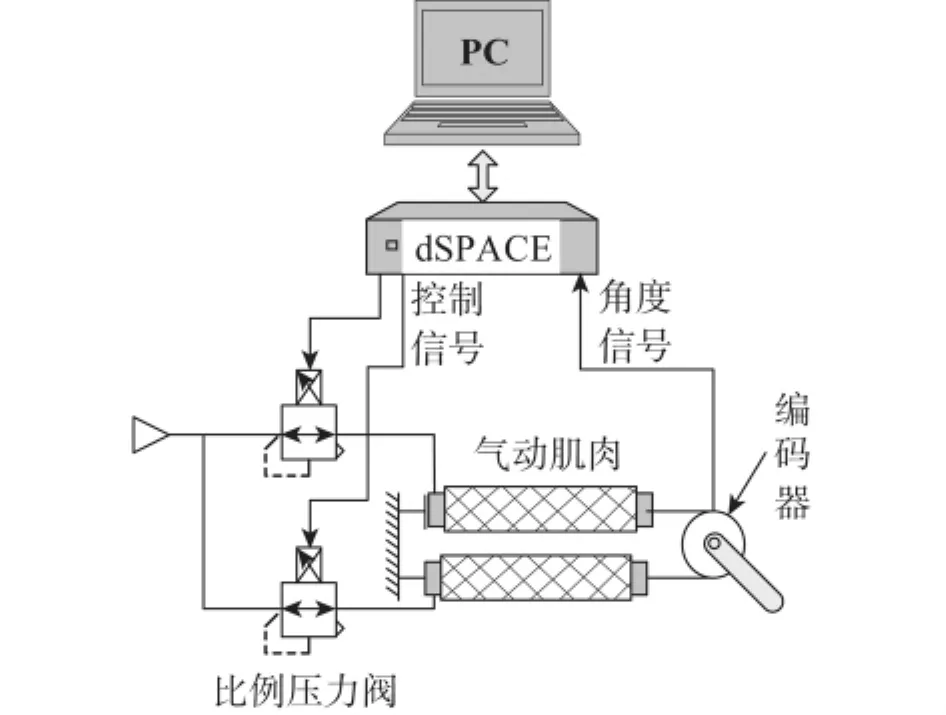
图7实验原理Fig.7 Schematic of experiment
由于人在运动平板上行走时,下肢推动身体前移的蹬运动通过平板的运动实现,而在平板上行走时,驱动下肢关节运动的主要力矩发生在摆动期.因此,外骨骼装置的助力主要是在摆动期帮助下肢向前迈步.
进行了2种模式的试验:一种是开环试验,在这种方式下,根据外骨骼各关节角度与负载力矩及气动肌肉压力变化的关系,计算得到气动肌肉压力的变化规律并作为系统输入;另一种是位置闭环试验,以正常步态时下肢关节的角度变化规律作为输入,并将关节的实际角度进行反馈.实验照片如图8所示.
实验初步表明,外骨骼装置在步态训练过程中能够有效地提供一定的助力和矫形功能.在实验中发现,由于每个人的步态轨迹存在差异,采用固定的步态轨迹做为输入并进行闭环控制时,由于控制力矩变化可能会不平滑,试验者会感觉不舒服.在开环实验中,力矩的变化则比较平滑,对试验者下肢轨迹的限制通过关节自身的刚度来保证,具有一定的柔顺性,因此相比闭环控制会舒服.

图8 外骨骼实验照片Fig.8 Photo of exoskeleton experiment
6 结论
本文设计并实现了一个用于下肢步态康复训练的外骨骼装置.对该外骨骼装置的训练模式进行了分析,并建立了基于气动肌肉驱动的外骨骼驱动模型.初步实验验证了该装置的有效性.
所设计的外骨骼具有如下一些特点:
1)既可以开环使用,也可以闭环控制;
2)具有一定的柔顺性,使用安全;
3)重量较轻,穿戴方便;
4)可以实现多种训练模式,灵活性强.
本文结果对于开发下肢步态康复机器人的研究具有重要的参考和应用价值.今后进一步研究的内容包括各种控制策略的研究,以得出具有较好人机协调性的控制方法;在原有外骨骼驱动髋关节和膝关节的基础上,再加上踝关节的驱动,以适应踝足的矫形.
[1]HUSSAIN S,XIE Shengquan,LIU Guangyu.Robot assisted treadmill training:mechanisms and training strategies[J]Medical Engineering & Physics,2011,33:527-533.
[2]JEZERNIK S,COLOMBO G,MORAR M.Automatic gaitpattern adaptation algorithms for rehabilitation with a 4-DOF robotic orthosis[J].IEEE Transactions on Robotics and Automation,2004,20(3):574-582.
[3]BANALA S,AGRAWAL S,SEOK H K,SCHOLZ J.Novel gait adaptation and neuromotor training results using an active leg exoskeleton[J].IEEE/ASME Transactions on Mechatronics,2010,15(2):216-225.
[4]SCHMIDT H,SOROWKA D,HESSE S,et al.Robotic walking simulator for neurological gait rehabilitation[C]//Proceedings of the 2nd Joint EMBS/BMES Conference.Huston,USA,2002:2356-2357.
[5]YOON J,NOVANDY B,YOON C H,et al.A 6-DOF gait rehabilitation robot with upper and lower limb connections that allows walking velocity updates on various terrains[J].IEEE/ASME Transactions on Mechatronics,2010,15(2):201-215.
[6]PONS J L.Rehabilitation exoskeletal robotics[J].IEEE Engineering in Medicine and Biology Magazine,2010,29(3):57-63.
[7]CHU A,KAZEROONI H,ZOSS A.On the biomimetic design of the berkeley lower extremity exoskeleton(BLEEX)[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation.Barcelona,Spain,2005:4345-4352.
[8]PRATT J E,KRUPP B T,MORSE C J.The RoboKnee:an exoskeleton for enhancing strength and endurance during walking[C]//Proceedings of the 2004 IEEE International Conference on Robotics& Automation.New Orleans,USA,2004:2430-2435.
[9]SUZUKI K,KAWAMURA Y,HAYASHI T,et al.Intention-based walking support for paraplegia patient[C]//Proceedings of the 2005 International Conference on Systems,Man and Cybernetics.Hawaii,USA,2005:2707-2713.
[10]王茂斌.脑卒中的康复医疗[M].北京:中国科学技术出版社,2006:64-79.
[11]陶国良,谢建蔚,周洪.气动人工肌肉的发展趋势与研究现状[J].机械工程学报,2009,45(10):75-82.
TAO Guoliang,XIE Jianwei,ZHOU Hong.Research achievements and development trends of pneumatic artificial muscles[J].Journal of Mechanical Engineering,2009,45(10):75-82.
[12]隋立明,张立勋.气动肌肉驱动仿生关节的理论分析[J].机床与液压,2007,35(6):113-116.
SUI Liming,ZHANG Lixun.Theoretical analysis of biomimetic joint actuated by pneumatic muscles[J].Machine tool& hydraulics,2007,35(6):113-116.
[13]CHOU Chingping,HANNAFORD B.Measurement and modeling of McKibben pneumatic artificial muscles[J].IEEE Transactions on Robotics and Automation,1996,12(1):90-102.