坐姿人体垂向振动特性及其三自由度模型参数
2011-06-05侯之超高江华何乐
侯之超,高江华,何乐
(清华大学 汽车安全与节能国家重点实验室,北京 100084)
理解坐姿人体对振动的响应特性可用于载运工具动态舒适性的评价与优化.对坐姿人体垂向振动特性的研究可追溯到1960年前后Coermann和Von Gierke等的工作[1-2],有关研究随着技术进步一直持续至今[3-5].根据大量实验观察,通常采用集中参数模型描述坐姿人体垂向振动特性,典型的有Coremann的单自由度模型、Suggs的二自由度模型,以及依据身体结构特征而建立的多自由度模型.国际标准化组织(ISO)发布的系列标准[6-9]中,先后给出过二自由度[6]、七自由度[7]以及三自由度[9]模型.模型的适用性一直是重要的研究内容[4-5].
上述研究以及相关标准均基于欧美人群.因为人种、生活方式、饮食习惯等方面存在的差异,这些成果难以直接用于东亚人群.韩国学者自20世纪90年代后期开始针对本国人群开展坐姿人体垂向振动特性研究[10].2005 年,Maeda与 Mansfield 发表了对12名日本男性志愿者进行的坐姿人体垂向振动试验,指出日本人体坐姿垂向视在质量与ISO5982-2001基于欧美人体给出的数据存在明显的差异[11].
1988年,冯焕玉以驱动点机械阻抗为响应函数,采用正弦激励对10名志愿者进行了坐姿振动实验,得到了一种二自由度模型的全部参数[12].1993年,房立新等基于随机激励与视在质量的幅频特性研究了坐姿人体垂向振动特性,比较了若干单自由度、二自由度系统模型的适用性[13].颁布于1996年并沿用至今的国家标准GB/T 16440,以中国人体坐姿驱动点机械阻抗测试数据为依据,给出了一种三自由度模型[14].然而,该模型既不同于 ISO5982-1981中的二自由度模型,也不同于ISO5982-2001中的三自由度模型.
研究显示,三自由度模型比二自由度模型更为准确,而进一步增加自由度数对模型拟合精度的提高作用有限[15-16].因此,本文采用 ISO5982-2001推荐的三自由度模型以描述坐姿人体垂向振动特性,以1980年代出生的中国人群为主要对象,基于随机激励研究无靠背坐姿人体垂向振动特性.应用视在质量的幅频与相频信息构造误差函数,通过优化识别全部模型参数,得到了多种激励水平下特定年龄段中国人体坐姿垂向振动特性的模型参数.
1 基本理论
1.1 视在质量及其测定
在描述坐姿人体垂向振动特性的主要物理量中,视在质量因为直观、便于测量而得到广泛的应用.其原始定义为

而实际测试中则采用下式计算:

式中:ω为圆频率,F(ω)与a(ω)分别为在座椅椅面测定的垂向激振力与垂向加速度的傅里叶变换,GFa(ω)、Gaa(ω)则分别为对应的力—加速度互功率谱与加速度自功率谱.
为了获得具有统计意义的模型参数,可采用2种方式对各志愿者实测视在质量数据进行处理,即简单平均与相对质量归一化后平均[14].文献[14]与本文的研究显示,质量归一化平均更能剔除个体差异.另一方面,视在质量在零频处的数值正是无振动时座椅承担的人体重量.以该值或某频率f1(接近零值)处的视在质量为参照[4],可定义归一化视在质量AMN.考虑到所用电液激振台的下截止频率,本文取 f1=1.0Hz.因此有


式中:ms为标准人体体重,γm为座椅静态受力与人体重量之比.
1.2 三自由度模型及其参数识别
ISO5982-2001推荐的描述坐姿人体垂向振动特性的三自由度模型如图1所示.图中mi、xi(i=0,1,2,3)为人体质量参数与各自相对平衡位置的位移;f表示外部激励;cj、kj(j=1,2,3)为人体阻尼与刚度参数.
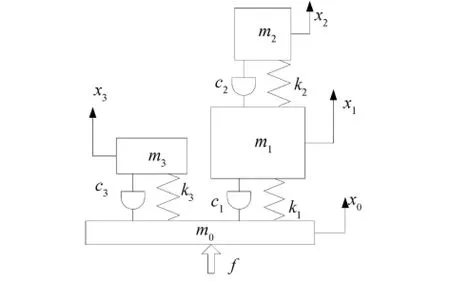
图1 ISO三自由度模型Fig.1 ISO model with three degrees of freedom
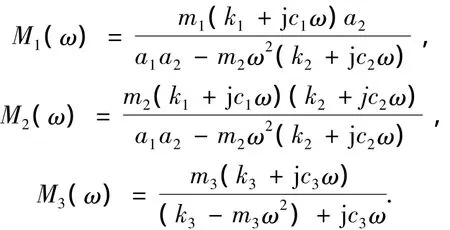
依据定义,该模型对应的视在质量为


应用式(5)、(6),考虑参数 mi>0、ci>0、ki>0等约束,可建立优化模型.针对不同激励水平下测得的某志愿者视在质量数据,或依据式(4)得到的某群体归一化平均数据,应用Matlab优化函数fmincon识别模型参数,进而计算相应的固有频率与模态阻尼等模态参数.参数识别过程中,初值和加权常数的选择是关键.本文利用随机函数生成可行域内初值,对不同的加权常数进行拟合,比较优化结果,选择误差最小的解作为最优模型参数.
在三自由度模型中去掉m2、c2、K2,即得到包含框架质量的二自由度模型[12-14],同样可以应用式(6)通过优化而识别全部模型参数.
2 实验与模型参数
2.1 视在质量的实验测定
测试系统与试验用自制无靠背座椅传感器分别如图 2[17]、3 所示.
座椅高度与椅面尺寸参考国家标准GB10000-88[18]设计.座椅面板为铝板,其四角下方各有一个力传感器.面板与力传感器的支撑底座采用角钢焊接而成,其框架结构固有频率高于80Hz.4个力传感器为组合梁结构剪切式应变力传感器,量程200 kg、频带范围0~200 Hz.2个压电式加速度计BK4383分别安装于座椅面板底面中心处和振动台面上,其频带范围0.01~20 kHz.力传感器弹性元件以上部分,包括座椅面板,共重8.4 kg.电液伺服振动台为日本鹭宫公司生产的EVH20-100-10,最大行程 ±100mm、频带范围1.0 ~20 kHz.
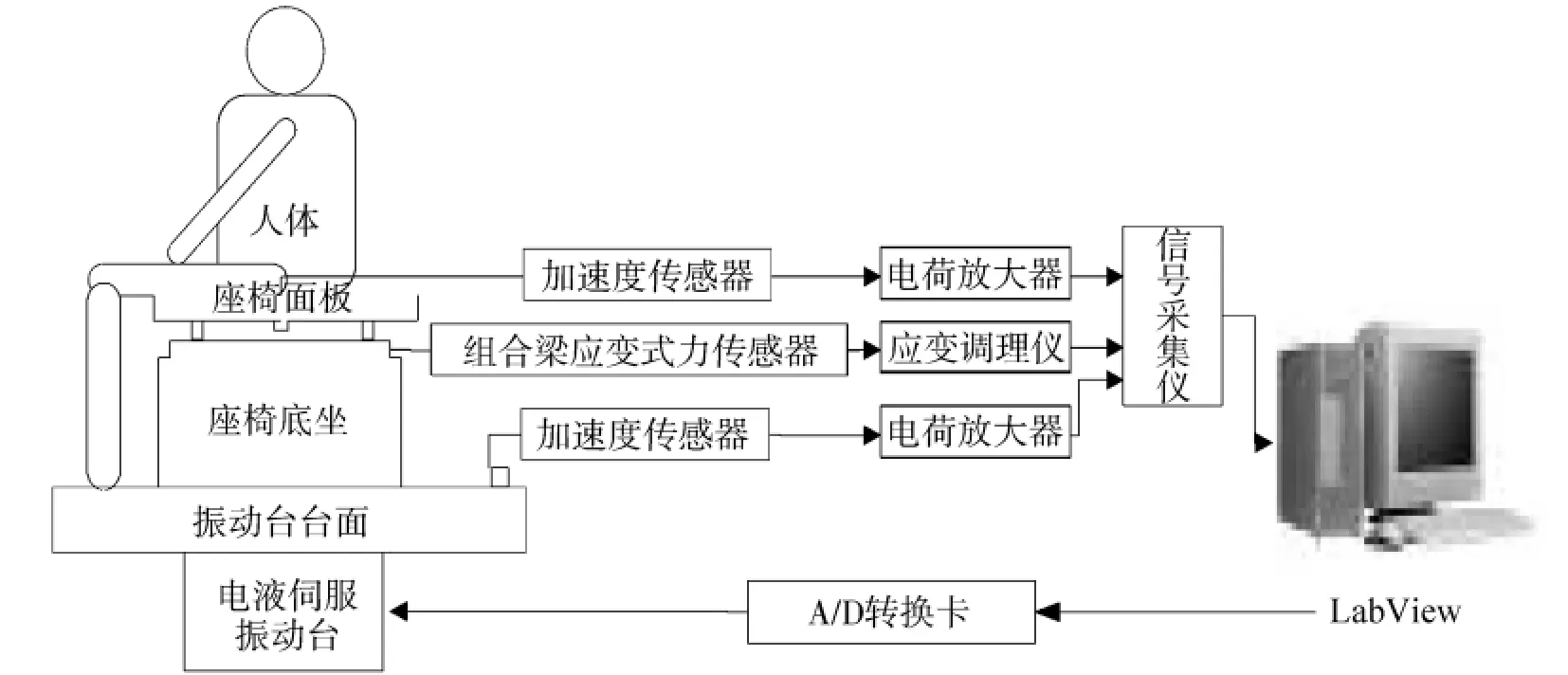
图2 视在质量测试系统框图Fig.2 Configuration of the test system

图3 测试用座椅Fig.3 Seat with force sensor
LabView产生的宽带随机白噪声信号通过NI公司PCI-6221型A/D转换卡转换为模拟信号,控制电液振动台产生激励.调整振动台面未计权加速度均方根值,可实现不同水平的激振.
参照ISO 5982-2001,约定如下测试条件:直立坐姿、无靠背,脚平放于振动台上、上臂自然下垂、双手平行放置于身前大腿上.28名志愿者中男性18名、女性10名,年龄为20~37岁、平均年龄24岁,身高为152~180 cm、平均身高168.9 cm,体重为42.9 ~79.5 kg、平均体重为62.4 kg.基于均方根表示的限带随机白噪声激励水平为0.5~2.0 m/s2.
在每一激励水平下,对每位志愿者测试2~3次,每次5 min,间隔不少于30 min.分别依据式(2)计算实测视在质量,取平均值作为试验值.分析实测数据发现,在1.0 m/s2激励水平下,18名男性志愿者坐姿垂向振动的第1阶固有频率在4.39~6.61 Hz,与相近年龄段日本男性志愿者的测试结果4 ~6.5 Hz[11]相近.当激励水平从 0.5 m/s2增加到2.0 m/s2时,各志愿者第1阶固有频率平均值由5.57 Hz下降为4.31 Hz,第 1 阶模态阻尼比总体呈下降趋势.第2阶固有频率平均值由12.1 Hz下降为9.34 Hz,第2阶模态阻尼比呈上升趋势.此外,就现有样本而言,无论男女,身高与模型参数间没有秩相关性;但体重与部分模型参数有不同程度的秩相关性.
2.2 模型与实测结果的对比
在依据式(6)优化识别出模型参数之后,根据式(5)可得模型的视在质量曲线.将其与前述实测视在质量曲线进行对比,可以考察模型的准确性.图4、5对比显示了激励水平为1.0 m/s2时模型与实测视在质量的幅频与相频曲线.
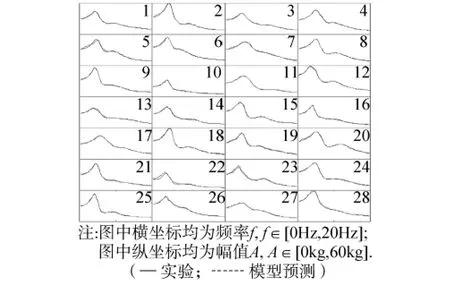
图4 28名志愿者的视在质量幅频曲线对比Fig.4 Amplitude of the apparent mass
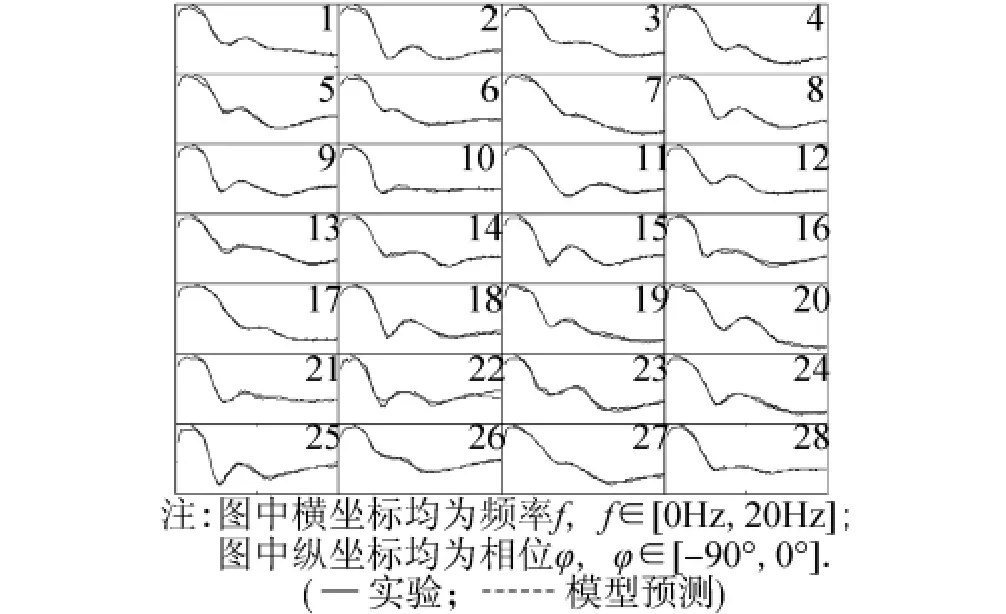
图5 28名志愿者的视在质量相频曲线对比Fig.5 Phase angle of the apparent mass
显然,对绝大多数志愿者而言,模型与试验确定的视在质量,其幅频曲线高度吻合;相频曲线吻合良好,只是在2 Hz以下频段存在误差.经测试分析可知,误差的主要原因是振动台因老化而使得低频精度较差.进一步考察模型与实测数据的相对误差,可以发现:几乎对所有志愿者,三自由度模型均优于二自由度模型;对某些志愿者,优势尤为明显.因此,ISO5982-2001所推荐的三自由度模型可以准确地描述坐姿中国人体垂向振动特性.
2.3 基于归一化视在质量的模型参数
依据国家标准GB10000-88,标准中国人体体重ms=65.0 kg.测试结果显示,座椅静态受力约为人体重量的83%,即γm=0.83.将同一激励水平下全部志愿者的视在质量测试结果依据式(3)作归一化,再平均,然后应用式(4)即得到标准中国人体坐姿垂向振动的视在质量数据.针对这组数据,通过优化识别出相应激励水平下模型的全部参数.几种激励水平下的模型参数如表1所示.需要指出的是,因为实验中志愿者绝大多数为1980年后出生,表1所示参数对其他年龄段人员的适用性有待验证.
进一步分析显示,在所关注的1~20Hz频段内,表1参数所确定模型给出的视在质量,其幅频与相频曲线均位于同一激励水平下实测数据上下限的中间.这说明模型预测结果是可靠的.
从表1可以看出,随着激励水平从0.5 m/s2增大到0.7 m/s2,m0减小;进一步提高激励水平,该参数几乎不变.然而其它参数的变化却与之不同.其中,m1、c1、k1先增大后降低,而 m2、c2、k2与 m3、c3、k32组参数则呈现先减小后增大的趋势.换言之,就所研究的年龄段而言,描述标准中国人体坐姿垂向振动特性的模型参数,随激励水平的变化较为复杂,但均非单调变化.
另一方面,表1所示全部模型参数与ISO 5982-2001针对欧美人群(体重75kg)给出的模型参数[9]均存在很大的差异.因为该标准中并未明确介绍模型所涉及人群的准确信息,这里难以进行详细的对比.然而,参数差异的存在说明将该标准数据用于描述坐姿中国人体垂向振动特性时需要十分慎重.

表1 24岁左右标准中国人体坐姿垂向振动模型参数(体重65kg)Tabel 1 Model parameters for Chinese people around an age of 24 with standardized weight(65kg)
3 结束语
本文利用宽带随机激励与自制刚性座椅传感器对28名平均年龄为24岁的志愿者进行了垂向振动特性试验,得到了多种激励水平下对应年龄段中国人体坐姿垂向振动的视在质量数据.基于视在质量的幅频与相频信息,识别得到了适合中国人体的ISO5982-2001推荐的三自由度生物动力学模型的全部参数.对比分析显示模型预测结果与实验数据吻合.研究工作说明了所采用模型的适用性以及参数识别方法的正确性.
今后可应用本文方法对其他年龄段中国人体进行研究.结合本文数据,可望获得完整的坐姿中国人体垂向振动特性数据,并建立统一的生物动力学模型,用于车辆乘坐舒适性评价与设计、以及工程车辆的振动防护.
[1]LIPPERT S.Human vibration research[M].London:Pergamon Press,1963:1-27.
[2]COERMANN R R.The mechanical impedance of the human-body in sitting and standing position at low-frequencies[J].Human Factors,1962,4(5):255-274.
[3]FAIRLEY T E,GRIFFIN M J.The apparent mass of the seated human body:vertical vibration[J].Journal of Biomechanics,1989,22(2):81-94.
[4]WEI L,GRIFFIN M J.Mathematical models for the apparent mass of the seated human body exposed to vertical vibration[J].Journal of Sound and Vibration,1998,212(5):855-874.
[5]BOILEAU P E,RAKHEJA S.Whole-body vertical biodynamic response characteristics of the seated vehicle driver measurement and model development[J].International Journal of Industrial Ergonomics,1998,22(6):449-472.
[6]International Organization for Standardization.ISO5982:1981.Vibration and shock—mechanical driving point impedance of the human body[S].1981.
[7]International Organization for Standardization.ISO7962-1987.Mechanical vibration and shock—mechanical transmissibility of the human body in the z direction[S].1987.
[8]International Organization for Standardization.ISO 2631-1:1997.Mechanical vibration and shock—evaluation of human exposure to whole body vibration[S].1997.
[9]International Organization for Standardization.ISO5982:2001.Mechanical vibration and shock—Range of idealized values to characterize seated-body biodynamic response under vertical vibration[S].2001
[10]PARK S J,PARK S C,KIM J H,et al.Biomechanical parameters on body segments of Korean adults[J].International Journal of Industrial Ergonomics,1999,23:23-31.
[11]MAEDA S,MANSFIELD N J.Comparison of the apparent mass during exposure to whole-body vertical vibration between Japanese subjects and ISO 5982 standard[J].Industrial Health,2005,43:436-440.
[12]冯焕玉.两自由度人体振动模型及其在汽车平顺性试验中的应用[J].汽车技术,1986,5:19-26.
FENG Huanyu.A model for human body exposed to vibration with two degrees of freedom and the application in automotive ride comfort experiment[J].Automotive Technology,1986,5:19-26.
[13]房立新.中国人立姿、坐姿人体振动模型的试验研究[D].北京:清华大学,1993:86-119.
FANG Lixin.Testing research of the mechanical model of Chinese people in sitting and standing position[D].Beijing:Tsinghua University,1993:86-119.
[14]中华人民共和国国家标准GB/T 16440-1996,振动与冲击—人体的机械驱动点阻抗[S].1996.
GB/T 16440-1996,Vibration and shock-mechanical driving point impendence of the human body[S].1996.
[15]KIM K S,LEE J H,KIM K J,et al.A nonlinear dynamic model of human body seated on vehicles[C]//The 33rd International Congress and Exposition on Noise Control Engineering.Prague,Czech Republic,2004:22-25.
[16]HOU Z C,GAO J H,ZHAO P.Research on models about apparent mass for seated human body subjected to vertical vibration[C]//The 13th Asia-Pacific Vibration Conference.Christchurch,New Zealand,2009:22-25.
[17]赵培.坐姿人体-泡沫坐垫系统参数识别与动力学分析[D].北京:清华大学,2008:52.
ZHAO Pei.Parameter identification and dynamic analysis on seated human body and polyurethane foam cushion[D].Beijing:Tsinghua University,2008:52.
[18]中华人民共和国国家标准GB-10000-88,中国成年人人体尺寸[S].1988.
GB-10000-88.Human dimensions of Chinese adults[S].1988.