变采样率技术在电磁波流速测量中的应用研究
2011-06-05刘纪元焦学峰
杨 强, 刘纪元, 焦学峰 , 么 启
(1.沈阳航空航天大学 电子信息工程学院,辽宁 沈阳 110136;2.中国科学院 声学研究所综合声纳实验室,北京 100080;3.北京航瑞博泰科技有限公司 北京100102)
目前流速测量的方法有很多,常用的有机械测量法、电磁测量法和超声测量法等。这些测量方法都是要求与流体直接接触的、近距离的测量方式,不适合测量含沙量大、漂浮物多的流体。电磁波流速测量方法是一种远距离、无接触的测量方法,适合于测量水流急、含沙量大、漂浮物多、水流复杂的一般江河的流速,具有安全、快速、使用方便等特点,在水文监测、水资源开发和利用、防汛防洪、环境保护、军事等行业都有重要的意义[1]。
1 电磁波流速测量原理介绍
电磁波流速测量原理如图1所示。电磁波流速测量方法是利用雷达多普勒效应[2]来测量流速的。雷达照射水面时,部分电磁波能量折射入水,部分能量被水面波散射,只有后向散射的那部分能量可以构成回波,波浪底下的水流基体是波浪的载体。所以波浪和基体的运动速度是相同的,接收到的信号频率相对于发射频率有一定的偏移,即波浪上的回波产生了“多普勒频偏”,它反应其水面流速,其直接关系式为:
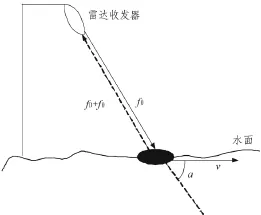
图1 电磁波流速测量原理图Fig.1 Water velocity measurement by electromagnetic wave

即:

其中:fD为多普勒频率,f0为雷达的发射频率,v为水流速度,c0为光速,α为水流的实际方向与传感器到运动目标连线之间的角度。
由式(2)可以看出,求得流速的关键是从回波信号频谱中提取多普勒频率fD。
2 变采样率技术的提出
2.1 多普勒频率的估计方法—FFT算法
1965年Cooley和Tukey提出了快速傅里叶变换[3](Fast Fourier Transform,FFT),使得N点的DFT的乘法计算量由N2次降为(Nlog2N)/2次。FFT的基本思想在于,利用Wn周期性和对称性,将原有的N点序列分解成两个或更多的较短序列,这些短序列的DFT可重新组合成原序列的DFT,而总的运算次数却比直接DFT的运算少得多,从而达到提高速度的目的。
利用FFT技术对信号进行频谱分析时,FFT算法测频精度主要受制于采样率fs和采样点数N。频率分辨率是两根谱线间的最小间隔,用频率间隔Δf表示:Δf=fs/N。要提高FFT的频率分辨率,可通过以下两种途径来实现:1)降低采样频率fs,这会使频率分析范围缩小,其降低的幅度受到采样定律的限制;2)增加采样点数N,这意味着计算机的存储量和计算量大大增加,不能满足测量系统实时性的要求。
2.2 单采样频率带来的问题
电磁波流速测量系统要求流速测量范围为0.10~20.0 m/s,测量相对误差小于1%,且满足嵌入式系统实时性要求。
根据采样定理fs≥2fD得出:
当采样频率fs较低时,可提取最大多普勒频率fD=fs/2,由式(2)可得最大可测流速较小,不能满足系统量程要求;采集N点数据时间较长,不能满足嵌入式系统实时性的要求。
当采样频率fs较高时,若同样采集N点数据,由Δf=fs/N得,频率分辨率Δf较大,测量精度较低;若增加采样点数,当信号做FFT计算时,会增加大量计算量,不能满足嵌入式系统实时性的要求。
因此,单一采样率不能同时满足系统对量程、测量精度及实时性的要求。所以引进了变采样率技术来实现测量系统的优化。
3 变采样率技术
实现采样率转换的方法有3个:1)如果原模拟信号可以再生,或者已经记录下来,那么可以重新采样;2)将数字信号通过D/A变成模拟信号后,再对模拟信号经A/D采样;3)运用变采样率算法,对抽样后的数字信号在“数字域”做采样率转换,以得到新的采样。这样既可以通过抽取来降低采样率,也可以通过内插来提高采样率。
首先介绍一下原模拟信号可再生的变采样率技术,原模拟信号可再生的变采样率系统流程图[5]如图2所示。系统主要包括AD初始化部分、FFT数据采集部分、频谱分析部分、确定速度范围部分及调整AD时钟部分。
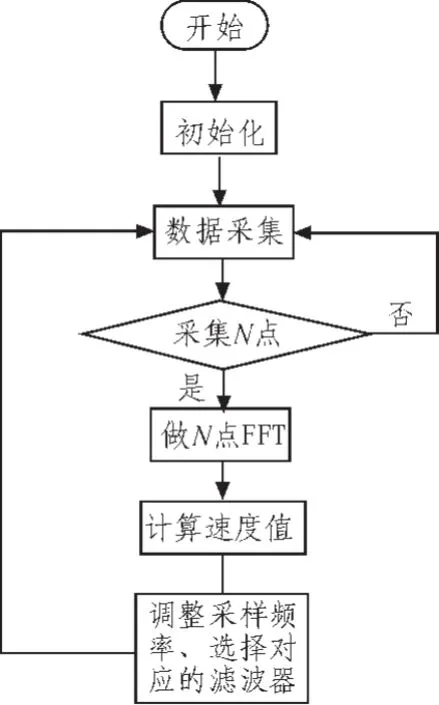
图2 原模拟信号可再生的变采样率技术流程图Fig.2 Changing sample ratio based on renewable analog signals
这种方法对硬件要求较高,每次测量都要对速度范围做判断,根据不同速度范围来调节AD时钟,从而改变采样频率。
下面着重介绍一下变采样率算法,变采样率算法主要有抽取算法和插值算法。通过抽取算法可以降低采样频率,通过内插算法可以提高采样频率。
3.1 抽取算法—降低采样率
3.1.1 基本原理
为了解决采样数据量过大,做FFT时计算量太大的问题,可以在原始采样序列x(n)中每D个抽样中取出一个,构成一个新的序列y(m)=x(Dm),这样的抽取称为 D倍抽取(D为整数,称为抽取因子)。
抽样关系如图3(a)所示。其中↓D表示抽样率降低为原来的1/D,也就是表示抽样器。

图3 抽取器及其框图Fig.3 Extractor and its block diagram
假设之前采样频率为fs,经D倍抽取之后,采样频率降为fs/D,采样频率降低了D倍。对于一个带宽为B的信号,以采样率fo(已经降低的)进行的采样过程,必须要满足采样定理所要求的条件,以保证经采样后的输出信号 y(m)可以准确无误的恢复原来的面貌。在-∞<f<∞的范围内或基本区间-fs/2<f<fs/2内,频谱的总带宽被表示为B。对于给定的采样率fo,带宽为B,必须满足如下的必要条件
实际上,大多数的输入信号都不能很好的满足这个条件,因此在进行抽取操作之前,必须事先经过一个抗混叠滤波器(Anti-Aliasing Filter,AAF),一般为低通滤波器,时域内可以起到平滑波形的效果,在频域内可以去除高频分量。一个完整的抽取器[6],如图 3(b)示。
3.1.2 抽取实例
输入信号如图 4(a)所示,图 4(b)和图 4(c)为下采样因子D=2 时抽取后信号 y(m)及其频谱函数|Y(ejΩ)|,图 4(d)和图 4(e)为下采样因子 D=4 时抽取后信号 y(m)及其频谱函数|Y(ejΩ)|。
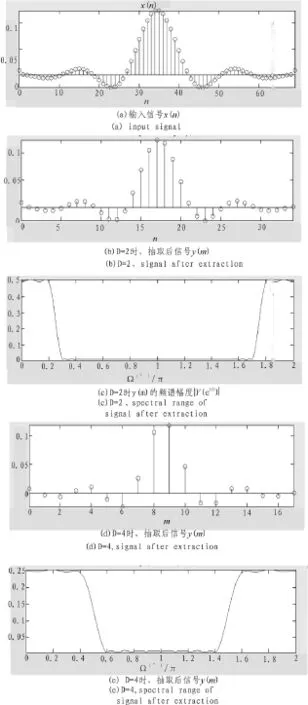
图4 抽取实例Fig.4 Extractor examples
3.2 内插算法—提高采样率
3.2.1 基本原理
在系统设计中,还会遇到提高采样率的要求,一般采用内插器来实现[6]。
所谓的内插就是在两个原始采样点之间等间距地插入L-1个零值,其中L为大于1的整数,称为内插因子。若原始采样数据为 x(n),插值之后的数据为 y(m)为:

内插关系如图5所示。其中↑L表示抽样率降低为原来的L倍,也就是表示内插器。
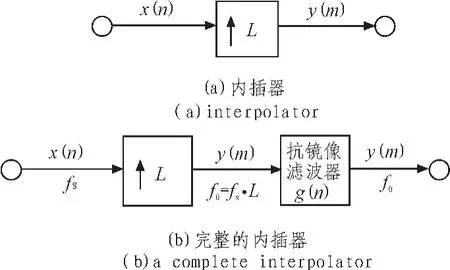
图5 内插器及其框图Fig.5 Interpolator and its block diagram
内插后信号y(m)的频谱周期变为原来的1/L,在数字频率轴2 π范围内会产生重复的波形,称之为镜像。因此,为了保证信号的原始特性不改变,必须要在内插之后加一个低通滤波器来滤除[-π/L,π/L]外的频谱,称之为抗镜像滤波器(Anti-Imaging Filter,AIF)。 完整的内插过程如图 5(b)示。
3.2.2 内插实例
输入信号为 x(m)如图 6(a)所示,图 6(b)和图 6(d)分别为内插因子L=2时和L=4时内插后的信号y(n)。图6(c)和图6(e)为经过抗混叠滤波后输出的信号y(n)。其中抗混叠滤波器的长度为80,截止频率为0.6 π。

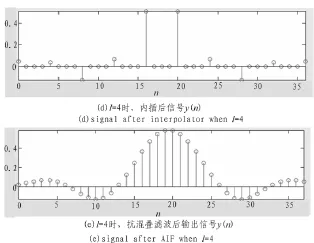
图6 内插实例Fig.6 Iinterpolator examples
3.3 有理数倍的采样率转换算法
3.3.1 基本原理
单独的抽取器和内插器只能实现整数倍的采样率转换,为了满足系统的不同需求,有时还需要将抽取器和内插器级联起来从而实现有理数倍的采样率转换,实现框图如图7示。

图7 有理数倍的采样率转换系统框图Fig.7 Rational multiples of changing sample ratio system and its block diagram
3.3.2 转换实例
输入信号 x(n)如图 8(a)所示,图 8(b)~图 8(d)分别为输入信号x(n)经L=3倍内插,低通滤波和D=5倍抽取之后的信号,转换因子为0.6。
3.3.3 抽取与插值不同次序的系统频域比较
柴晓东在其 《数字信号抽取与插值不同次序的频域分析》[7]中指出,输入信号x(n)经过先抽取后插值的抽样率转换系统后,其基带频谱损失为Δw1>Δw4,而经过先插值后抽取的抽样率转换系统后,当且仅当L<M,π/M<Ωc/L时,其频谱有损失,其基带频宽损失为 Δw2=2(MΩc-Lπ)/L。 对于其他情况其频谱都没有损失。显然Δw1>Δw4。这说明,先插值后抽取的采样率转换系统对信号频谱影响较小,丢失信息相对较少。因此,在构造有理数倍采样率转化系统时,一般采取对信号先插值后抽取的方法。
4 实验验证
系统中使用微波段雷达收发器,设定工作频率为20 GHz,由式(2)得,当 α=0时,1 Hz对应流速为 0.75 cm/s.
当采样频率为2 kHz,采集2 048点时,对应的频率分辨率为1 Hz,速度分辨率为0.75 cm/s,满足系统精度的要求。但是可测最大速度为7.68 m/s,不能满足系统量程要求。
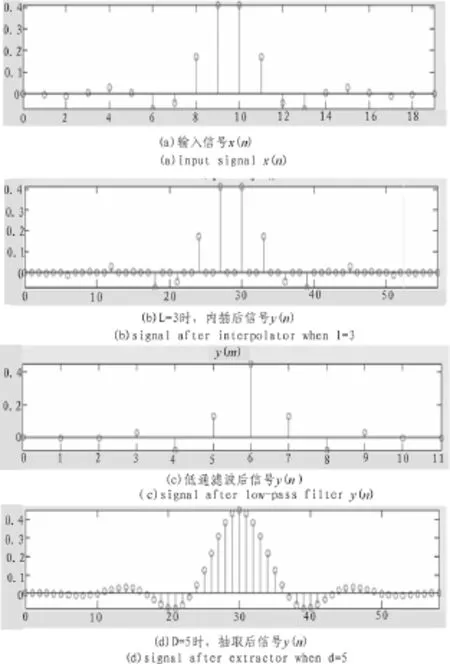
图8 有理数倍变采样率实例Fig.8 Rational multiples of changing sample ratio example
当采样频率为8 kHz,采集2 048点时,对应的频率分辨率为4 Hz,速度分辨率为3 cm/s,不能满足系统精度的要求。可测最大速度为7.68 m/s,不能满足系统量程要求。若采集8 192点时,则可以满足系统精度的要求,但会大大增加计算量,不能满足系统实时性要求。
经过试验反复验证,将变采样率技术应用到电磁波流速测量系统中后,系统中测量精度、量程和实时性的矛盾得到了很好的解决,系统运行可靠高效。
表1为输入信号为不同单一频率时,系统测得的对应的频率值。从表中可以看出,去除测量系统误差,测量值与真实值基本一致。图9为表1中输入信号为频率为500 Hz的正弦信号4倍抽取的过程。原采样率为8 k,采集8 192点。4倍抽取后,采样率变为2 k。

表1 输入信号为不同单一频率时,系统测得的对应的频率值Tab.1 Test data of different single frequency of input signal
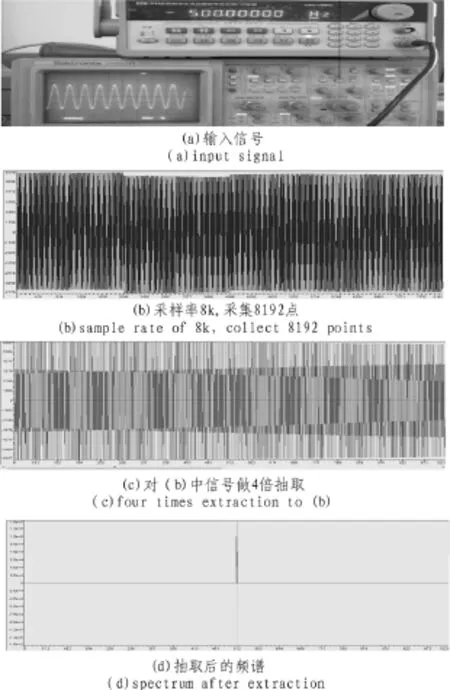
图9 采集单一频率的4倍抽取Fig.9 Four times extraction on a single frequency
表2为输入信号为不同扫描频率时,系统测得的对应的频率值。图10为表2中输入信号为频率范围为200~300 Hz的正弦信号4倍抽取的过程。原采样率为8 k,采集8 192点。4倍抽取后,采样率变为2 k。
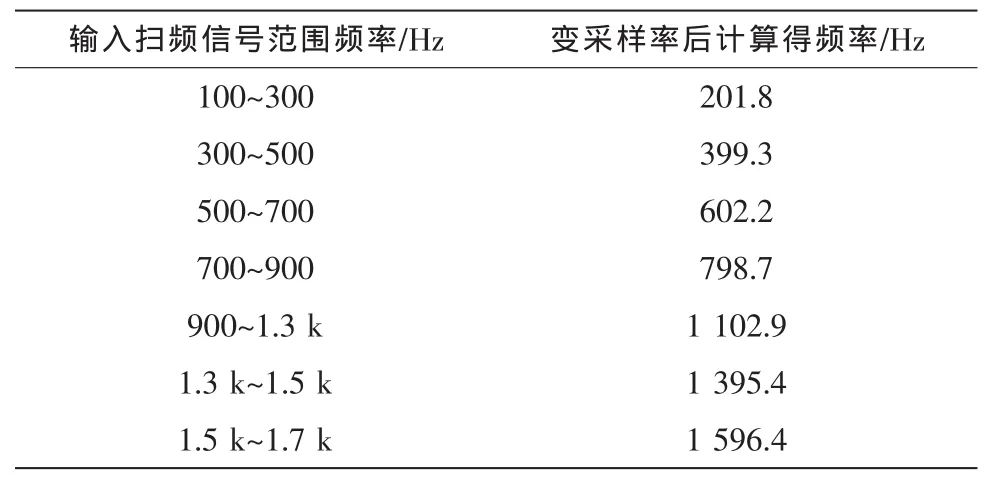
表2 输入信号为不同扫描频率时,系统测得的对应的频率值Tab.2 Test data of different scanning frequency of input signal
5 结 论
单一采样频率无法满足电磁波流速测量系统对测量精度、量程和实时性的要求[8]。将变采样率技术应用到测量系统后,这一问题得到了很好的解决。经过反复实验验证,运用变采样率技术之后,测量系统得到明显优化,系统运行可靠高效。
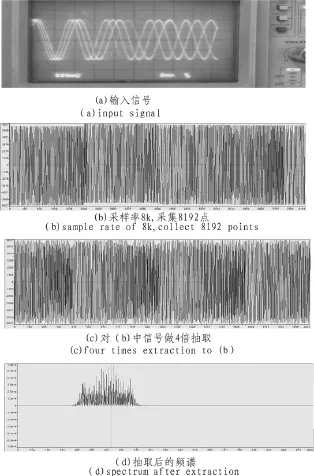
图10 采集200-300 Hz信号的4倍抽取Fig.10 Four times extraction on 200-300 Hz signal
[1]张建海.LD15-1型电波流速仪的比测与应用[J].水利水文自动化1997(3):13-17.ZHANG Jian-hai.Measurements and applications of LD15-1-type electromagnetic flow meter[J].Automation in Water Resources and Hydrolog,1997(3):13-17.
[2]丁鹭飞,陈建春.雷达原理[M].北京:电子工业出版社,2009.
[3]胡广书.数字信号处理:理论算法与实现[M].北京:清华大学出版社,2003.
[4]周翠,王路.多抽样率信号处理理论及其应用研究[J].软件导刊,2007(21):35-37.ZHOU Cui,WANG Lu.Multirate digital sigal processing theory and its application[J].Software Tribune,2007(21):35-37.
[5]陆娜,栾晓明,刘晶,等.宽动态范围自适应变采样率数据采集系统设计[J].自动化技术与应用,2008,27(1):79-81.LUNa, LUANXiao-ming, LIUJing, etal.Awidedynamicrange data acquisition system with adaptive sampling rate[J].TechniquesofAutomationandApplication,2008,27(1):79-81.
[6]奎克勤(美).多采样率系统[M].王德海,译.北京:电子工业出版社,2009.
[7]柴晓东,袁晓.数字信号抽取与插值不同次序的频域分析[J].通信技术,2009,42(02):317-319.CHAI Xiao-dong,YUAN Xiao.Frequency-domain analysis of sampling-and -interpolation different sequence[J].Communications Technology, 2009,42(02):317-319.
[8]张贤达.现代信号处理[M].北京:清华大学出版社,2002.