高精度多径时延估计
2011-06-03付龙飞张水莲
付龙飞,张水莲,辛 刚
(解放军信息工程大学,河南 郑州 450002)
多径时延参数是无线信道的重要参数,是反映无线信道通信质量的关键指标之一。多径时延参数的估计是现代信号处理领域非常活跃的研究课题,广泛地应用于通信、雷达、地质勘探等领域。匹配相关是估计信道多径时延的经典方法,具有高鲁棒性、低计算量等优点。但随着多径相对时延的减小,匹配相关法的性能会急剧下降,由于时延可分辨的条件是时延宽带积大于等于1,即使在理想信道的情况下,其分辨力的极限是信号带宽的倒数。为了突破匹配相关法的分辨力极限,人们提出了基于代价函数的时延估计方法。最小均方误差法(MMSE)、极大似然法(ML)以及非线性最小乘法(NLS)均是典型的基于代价函数的估计方法。这些方法能够实现超分辨力估计,即能够分辨时延小于信号带宽倒数的多径信号。但是,基于代价函数的时延估计方法涉及到多维参数优化的问题,计算量庞大,实时性不够理想。随着多径时延估计方法研究的深入,人们将阵列信号处理的方法应用于多径时延估计,建立了基于特征子空间分解的时延估计方法[1-4]。基于MUSIC算法的多径时延估计方法便是其中的杰出代表。本文针对无线信道多径时延的特点,提出一种基于MUSIC和root MUSIC算法的简单易行的高精度信道多径参数估计方法,把时域的时延问题转换到频域内,利用MUSIC和root MUSIC算法具有高频谱分辨率这一特性[5],进而得到高精度的信道多径时延参数。
1 数据模型
接收信号的离散模型可表示为:

其 中 ,s(n)表 示 发 送 的 信 号 序 列 ,λl(n)和 τl(l=1,…,L)分别表示第l条路径上信道对发送的信号序列所施加的调制和时延,υ(n)是白高斯噪声。一般情况下,若信号序列较短,信号在信道传输过程中,λl(n)可以认为是一个常数。于是,式(1)可以写成如下的形式:


式中,(n),N表示相关值的数据长度。
对式(3)进行N点的 DFT,可得:


在式(4)中,令n(k)=Ps,υ(k),统一等效成信号的噪声。虽然Ps,υ(k)不再是白噪声,但在信噪比较大的情况下,对估计性能不会产生很大的影响。

将式(5)写成矩阵的形式:

其中,
现在只需要证明T是列满秩,就可以建立近似等距多元线阵的数据模型,进而采用MUSIC算法,对T中的频率分量进行估计,再通过式(5)完成各时延的估计。在该近似等距多元线阵模型中,λ可以认为是不相干的远场窄带信号,Ps,r可以认为是一次快拍信号。其实,T是满秩的条件很容易满足。对T进行分解可得:

由于A是一个列满秩的Vandermonde矩阵,只要第一部分的秩(即对角矩阵G非零元素的个数)大于第二部分的秩 (即 Vandermonde矩阵 A的列数),T就是一个满秩的矩阵。在实际情况下,这样的条件一般是满足的。而且,矩阵G对角线上的元素构成了信号s(n)的功率谱,一般情况下呈现低通性,为第3部分基于单次测量数据的时延估计分析奠定了良好的基础。
通过多次“快拍”Ps,r估计出它的相关矩阵 RP=E{Ps,r},进而对其进行特征值分解得到由噪声特征向量所组成的矩阵C。根据MUSIC算法的原理,式(6)中的T与噪声特征向量所组成的矩阵C正交,即:

式(10)极大值出现的位置即为 T中ωl(l=1,…L)的估计。与经典 MUSIC算法的不同是,此时 T(ω)=[Ps,s(0),Ps,s(1)e-jω,…,Ps,s(N-1)e-j(N-1)ω]T,即 存 在 一 个 低 通 包 络 。
下面分析将root MUSIC算法应用上述模型的合理性。
root MUSIC算法是MUSIC算法的一种多项式求根形式,于1983年由Barabell提出,其基本思想是Pisarenko分解[6]。
对式(10)求倒数,并联立式(7)得到:
令 O=[Om,n]N×N=GHCCHG,则有:

式(8)的等价含义是,T中的每个列向量都与C正交。因为T的每个列向量均有相同的形式,于是对T中频率分量进行估计的问题可以转化为求下式零点的问题:

式(9)的另一个等价形式表示为:


于是,式(10)极值的估计问题可以转化成为式(13)在单位圆上根的估计问题。通过式(13)求出离单位圆最近的并关于单位圆对称的L对根。这些根的相位即对应式(8)中 ωl(l=1,…L)的估计。
2 基于单次测量数据的多径时延估计
在前面的推导中,对“快拍”数据Ps,r的自相关矩阵的估计需要用到多次测量的数据,并且要求各传输路径的调制系数 λ=[,…,]T不相关。但很多情况下,多径信道随着时间的推移其多径参数会发生显著变化。譬如多径的条数以及时延发生了变化,上述的模型将不再适用于多径时延估计。另外一个必须注意的问题是,如果各传输路径邻近,则它们的调制系数λl(n)(l=1,…L)可能存在着强相关性,这种强相关性也使得多次测量的数据没有什么意义。因此,通过分析单次测量的数据来估计多径时延更具有实际意义。
为了克服远场信号的相干性,人们提出了空间平滑技术。通过空间平滑,可以构建一个缩小了孔径的多元线阵模型。针对单次测量的数据,将空间平滑的技术移植到本文所提出的模型同样适用,即可以通过空间平滑技术得到一个较小的自相关矩阵RP=E{Ps,r,}。 但是本文提出存在一个低通的包络,会对空间平滑估计的性能产生不利影响。然而,BESSON和STOICA指出[7],在包络变化平缓的情况下,信号子空间与噪声子空间的匹配程度只是稍有下降,即MUSIC的估计性能只是稍有降低,仍然可以用于高精度地估计式(6)中的频率分量,从而估计多径时延。

其中,RP(Δk)表示Ps,r(k)的自相关函数的估计序列。得到Ps,r(k)自相关函数的估计RP(Δk)之后,可采用参考文献[8]的思想完成基于单次探测数据的自相关矩阵的估计,令自相关矩阵的估计为:

其中,M可以认为是缩小了孔径的阵元数,应充分小于单次测量数据的长度N;式(15)中的元素为:当i≥j时,有Rij=RP(i-j);当i<j时,有Rij=。从统计的角度讲,式(15)中的M越小,更接近于自相关矩阵的真实值[9];从阵列信道处理的角度讲,M越大,相当于阵元越多,分辨率越高。二者对立统一,如何选择M的大小,在工程应用中需要针对不同的通信序列具体分析。

但本文采用另外一种方法来构建基于单次测量数据的自相关矩阵。 由式(3)和(4)可知,Ps,r(k)是Rs,r(τ)的傅里叶变换,它们均是长度为N的序列。若将它们看作随机变量的采样值,存在如下关系:
对照式(11)到式(13),基于单次实验数据所推导的模型同样适用于root MUSIC算法,这里不再赘述。
3 仿真
下面的仿真结果均基于单次测量的数据。仿真的信号是频率为f(t)=flower+βt(0≤t≤T)的正弦波,即 Chirp序列。 在这里,β=(fupper-flower)/T,flower和fupper分别对应在时间区间0≤t≤T内的起始频率和终止频率,仿真信号的带宽为B=。 仿真条件为flower=0 Hz,fupper=4×104Hz,采样频率fs=8B=8fupper,T=511/fs, 式 (15)中的M=roundround(x)表示取离x最近的整数。仿真的多径条数为2,时延相差4个采样点。
图1是信噪比为0 dB时接收的信号与本地参考信号匹配相关的结果,由于4/fs<1/B,即相对多时延小于信号带宽的倒数,匹配相关后不能得到任何的多径信息。
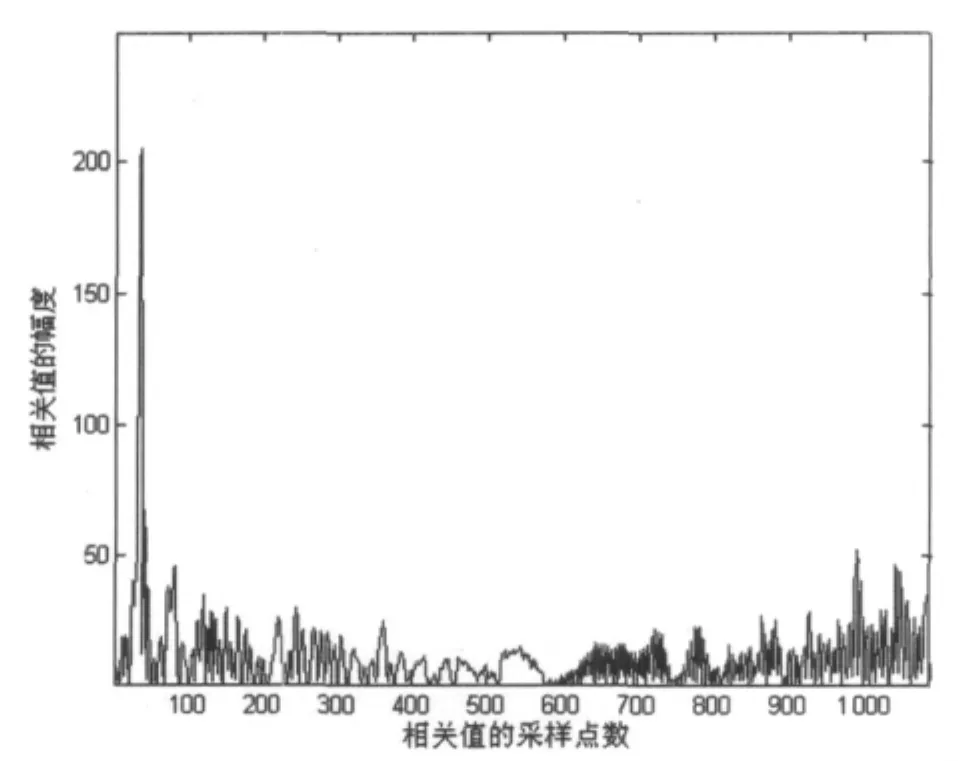
图1 接收的信号与本地参考信号匹配相关的结果
图2是由基于本文模型的MUSIC算法和root MUSIC得到的仿真结果,信噪比仍为0 dB。曲线的两个峰值分别对应通过MUSIC算法得到的由两条多径时延所产生的频率的估计,两个星号对应由root MUSIC算法得到频率估计,两箭头表示由实际时延所生的频率分量。由此可以看出,通过本文提出的算法,即使基于单次测量的数据,也能够高精度地估计式(6)中T的频率分量,从而得到准确的时延估计。
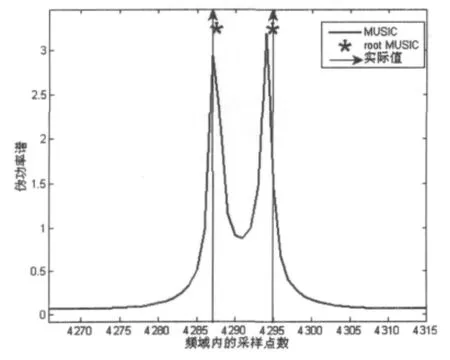
图2 MUSIC和root MUSIC算法进行时延估计的结果
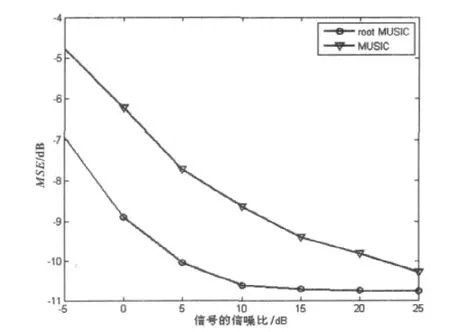
图3 MUSIC和root MUSIC算法估计性能比较
提出了一种多径时延模型,将时延问题转化成为频谱估计的问题。该问题的实质是,完成存在低通包络情况下的频率分量估计。建立相应模型之后,再利用具有高频率分辨力的MUSIC算法以及root MUSIC算法完成对时延的高精度估计。分析了基于单次测量数据的时延估计,并对其进行了仿真。仿真结果表明,本文提出的方法对时延具有超分辨力;在相同的条件下,root MUSIC算法比MUSIC有更好的估计性能;由于低通包络的影响,基于单次测量数据的时延估计是一个有偏估计。
[1]王巍,熊瑾煜,朱中梁.CDMA信号码片内多径时延估计算法[J].电子与信息学报,2004,26(9):1345-1450.
[2]黎英云.微弱多径信号时延估计技术研究[D].武汉:华中科技大学,2009.
[3]Ge Fengxiang,Shen Dongxu,Peng Yingning,et al.Superresolution time delay estimation in multipath enviroments[J].IEEE Transactions on Circuit and Systems-I,September 2007,54(9):1977-1986.
[4]SAANRNISSARI H.TLS-ESPRIT in a time delay estimation[C]//Proceedings of IEEE 47th Vehicular Technology Conference.Phoenix,USA,1997:1619-1623.
[5]SCHMIDT R O.Multiple emitter location and signal parameter estimation[J].IEEE Transactions on Antennas and Propagation,March 1986,AP34(13):276-280.
[6]BARABELL A J.Improving the resolution performance of eigenstructure based direction-finding algorithms[C].Proceedings of International Conference on Acoustics,Speech and Signal Processing.Boston,USA,1983:336-339.
[7]BESSON O,STOICA P.Analysis of MUSIC and ESPRIT frequency estimates for sinusoidal signals with lowpass envelopes[J].IEEE Transactions on Signal Processing,1996,44:2359-2364.
[8]REN Q S.WILLIS A J.Extending MUSIC to single snapshot and online direction finding applications[C].Record of IEEE International Radar Conference,Publ.No.449.Edinburgh,UK,1997:773-787.
[9]王世一.数字信号处理(修订版)[M].北京:北京理工大学出版社,1997.
