开关磁阻电机的直接瞬时转矩控制系统设计与仿真*
2011-06-02李大威王勉华刘春元
李大威, 王勉华, 刘春元
(西安科技大学电气与控制工程学院,陕西西安 710054)
0 引言
开关磁阻电机(Switched Reluctance Motor,SRM)具有结构简单、运行可靠、起动转矩大、调速范围宽、控制灵活等优点,是一种具有发展潜力的新一代交流调速电机。但相较于传统的异步电机,SRM的另外一个典型特征是转矩脉动大,这是由其工作方式决定的。SRM是一种反应式电机,其定、转子的双凸极结构以及磁饱和工作区间都给系统性能的精确预测带来了麻烦。如何从控制的角度抑制SRM的转矩脉动已成为各国学者研究的热门课题。
目前较主流的解决思路是基于各种非线性模型辨识理论的优化电流控制方法,如迭代学习控制、神经网络控制等,这些方法都是在已知转矩模型的前提下进行最佳控制电流的学习,在导通角变化时转矩分配函数也要随之变化,控制过程较为复杂。直接瞬时转矩控制(Direct Instantaneous Torque Control,DITC)方法可以回避以上问题,它将转矩作为直接的控制量,在换相期间不需要设计转矩分配函数,能适应各种导通角下的运行情况,控制思想简单直观,易于在低成本的控制系统中实现,其控制的关键是转矩控制器的设计。
1 SRM的DITC方法
DITC方法将任意时刻总的输出转矩作为自己的控制量。在预先设定好的导通角内,根据参考转矩和反馈转矩的偏差,控制导通相的开通、关断和续流状态来控制该相转矩的变化,从而控制总的合成转矩,其中相邻两相转矩的分配是按下一相优先导通的原则确定的,以实现转矩的顺利过渡。
1.1 SRM的转矩特性
SRM的运行原理遵循“磁阻最小原理”,即磁通总要沿着磁阻最小的路径闭合,因此要产生正的转矩,SRM要工作在电感上升区域。连续切换各相,使每相都在正的转矩区导通,电机就能连续地转起来。SRM一相定子绕组产生的转矩可以根据能量守恒定律推导出来:

式中:i,ψ——相电流和相磁链;
θ——转子所转角度;
Wc——磁共能。

式中:l——相电感。
当电流恒定时,式(1)可简化为

当忽略磁场的非线性时,将式(2)代入式(3):

由式(4)可以定性得出以下结论:一相绕组的转矩可以认为是转子位置角θ和绕组电流i的函数,转矩随着位置角θ作周期性的变化,在任意一个确定位置θ,转矩值随着电流的增大而增大。
1.2 开关状态的设定
SRM的功率变换电路采用了半桥式结构。根据其工作过程,可以将一相定子绕组的开关状态分为三种:1、0和-1。图1为一相电路的3种开关状态。1是上下两个开关管都导通,此时绕组两端电压为+Us,电路处于激励状态;0是只有一个开关管导通,绕组两端电压为0,电路处于续流状态;-1是两个开关管都关断,绕组两端电压为-Us,电路向电源反馈能量。

图1 一相电路的3种开关状态
1.3 转矩控制器的设计
转矩控制器是DITC系统的核心,其任务是根据转矩的变化要求,合理地选择导通相及其开关状态。SRM任意一相的导通角需要根据负载的要求优化确定,通常可以由经验设定。根据任意时刻导通角的重叠情况,可以将SRM的工作区域划分为单相导通区域和两相导通区域,这样任意一相的一个工作周期可以划分为四个区域,如图2所示。
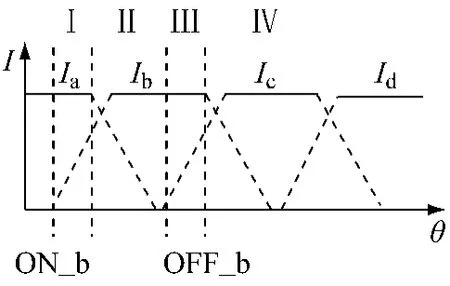
图2 四相绕组导通角的分布
在单相导通区域Ⅱ,导通相的前一相已经关断而其后一相还没有开通,此时只需根据转矩内滞环对该相进行斩波控制。该区域的前一阶段前一相虽然关断,但电流不会立刻下降到零,会有一段电流下降时间,前一相的开关状态保持为-1不变。对于导通相,为了在不增加开关频率的情况下保证转矩的平稳变化,只采用1和0两个开关状态来调节转矩。当瞬时转矩增大,转矩偏差低于内滞环下限-ΔTmin时,转入状态0让该相处于续流状态,以减小输出转矩;当瞬时转矩减小,转矩偏差大于内滞环上限-ΔTmin时,转入状态1,给该相励磁以增大输出转矩,工作过程如图3(a)所示。
在两相导通区域Ⅰ和Ⅲ,当前相还没有关断而后一相已经开通,因此要合理调节两相的开关状态以使转矩得到合理分配。为了让后一相转矩迅速建立起来,只选择1和0对该相进行调节。采用内外双滞环限进行调节,工作过程如图3(b)所示。
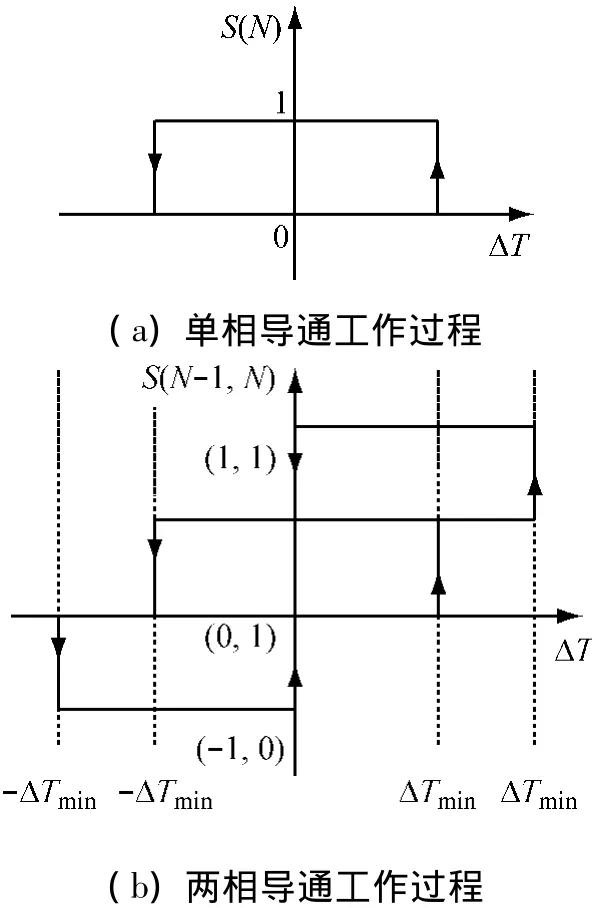
图3 转矩滞环控制原理图
在两相导通区域初期,给下一相通电,让下一相工作在状态1,让当前相续流工作在状态0。当下一相产生转矩不足时,总体转矩会下降,当转矩偏差大于外滞环上限ΔTmax时,让当前相也工作在状态1以增大转矩。当转矩偏差小于0时,再将当前相转入状态0。当转矩继续增大,转矩偏差小于内滞环下限-ΔTmin时,将下一相也转入状态0。此后,若转矩减小,转矩偏差大于内滞环上限ΔTmin时,再将下一相转入状态1;若转矩进一步增大,转矩偏差小于外滞环下限-ΔTmax时,将当前相转入状态-1以迅速减小转矩,当转矩偏差大于0时,再将当前相转入状态0。由图3(b)可知,两相的开关状态组合有四种(-1,0)、(0,0)、(0,1)和(1,1),电机在三个转矩滞环中进行切换工作。
2 DITC系统仿真模型的建立
本文在MATLAB中建立了SRM的DITC调速系统的仿真模型,如图4所示。电机模型选择Simulink模型库提供的SRM模块。系统主要包括PI调速模块、导通角设定模块、DITC模块及功率变换器模块等。
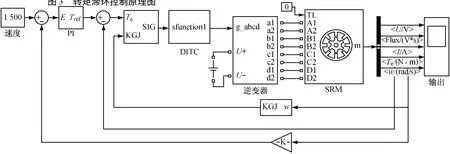
图4 SRM的DITC系统仿真模型
其中,DITC模块根据上文介绍的转矩控制器的设计方法编程实现,输入是四相的导通信号以及转矩偏差信号,输出是四相的三种开关信号。PI调速模块的作用是根据速度偏差信号给定参考转矩,要求在动态时能快速响应,稳态时转矩给定要恒定。本文采用了积分分离法来克服电机起动初期大转速偏差造成的积分饱和,当转速偏差小于100时才起动积分环节,以减小超调,如图5所示。
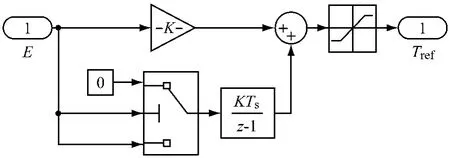
图5 PI调速模块
3 仿真结果与分析
选取一组仿真运行参数:开通角设为32°,关断角设为55°。转矩控制器的内滞环限为0.3,外滞环限为0.5,负载转矩为10 N·m。仿真结果如图6所示,图7为相同导通角下电流斩波控制(Chopped Current Control,CCC)时的转矩波形。
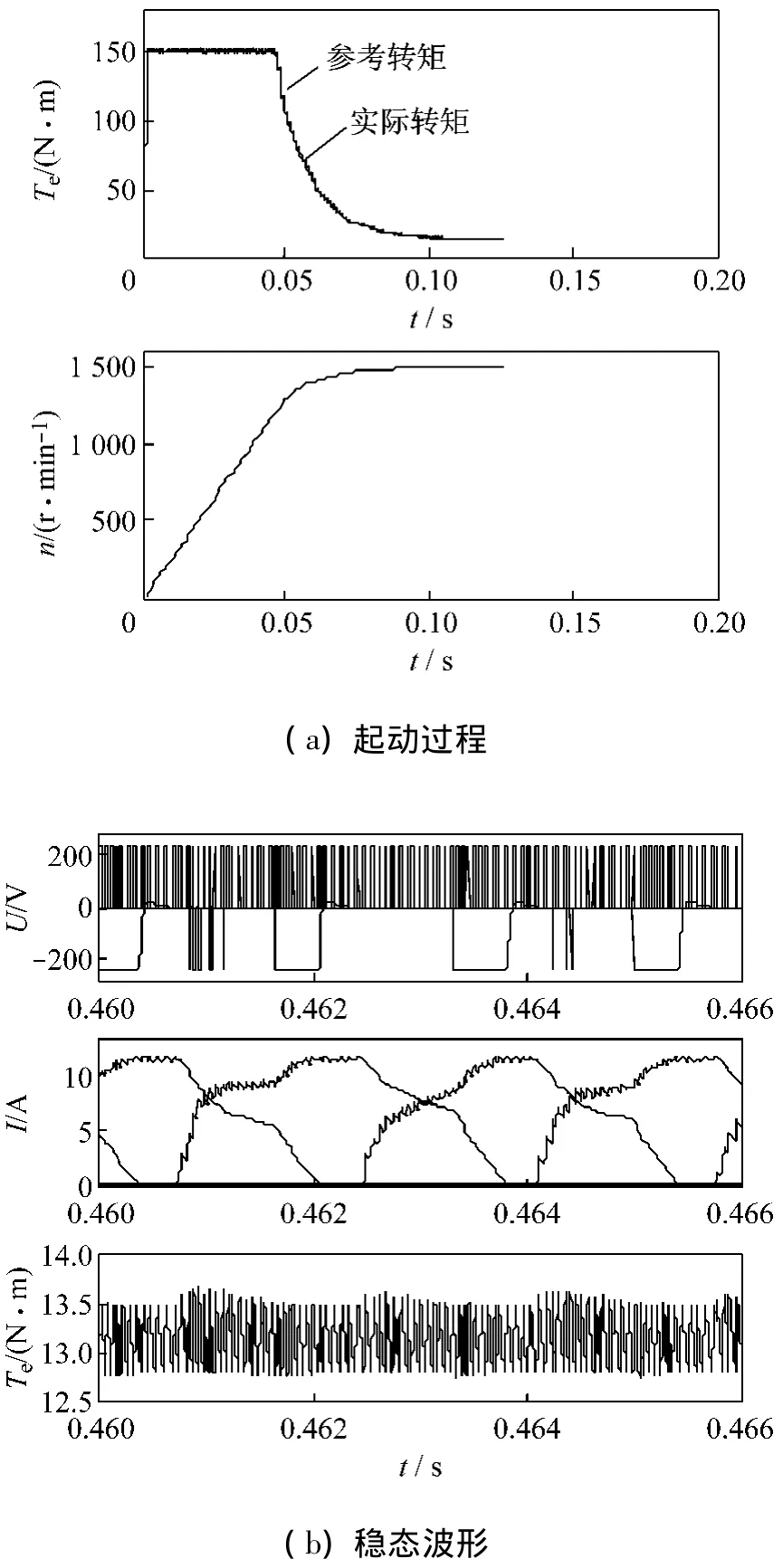
图6 DITC下的仿真结果
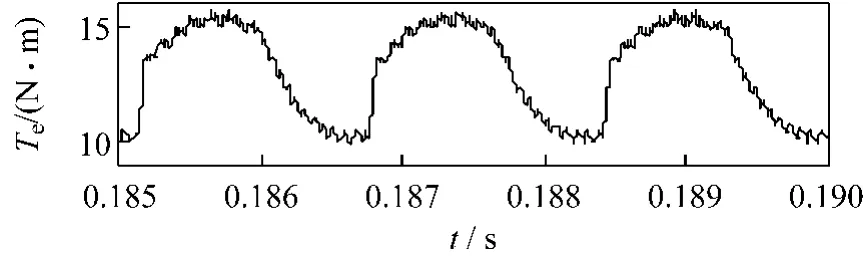
图7 CCC下的转矩波形
图6(a)为DITC下电机起动过程中的转矩和转速波形。可以看出,转矩能够准确地跟踪参考转矩,且波动很小,起动过程迅速平稳。图6(b)为电机稳定运行后的四相电压电流和转矩波形。可以看出,在换相期间前一相和后一相都进行了斩波控制,单相电流波形不再是方波。在两相导通期间,转矩值在12.8~13.6 N·m之间波动,单相导通期间,转矩值在12.8~13.4 N·m之间波动,波动范围在所设定的滞环限内,且转矩波形明显优于电流斩波控制下的转矩波形,证明本文所设计的DITC方法能在任意导通角给定下有效提升SRM动、静态工作过程中的转矩性能。
4 结 语
本文将DITC方法应用到SRM控制系统中,给出了一种转矩控制器的设计方法。仿真结果验证了本文所设计的DITC方法能够根据调速的需要准确地控制转矩,证明了DITC方法是一种有效可行的、减小SRM转矩脉动的控制方法。
[1]Robert B Inderka,Rik W De Doncker.Direct instantaneous torque control of switched reluctance drives[C]∥IEEE 37thIAS Annual Meeting,2002,USA,IEEE,2002:1605-1609.
[2]李珍国,魏艳君,阚志忠,等.基于四电平功率变换电路的开关磁阻电机瞬时转矩控制[J].电工技术学报,2007(8):144-149.
[3]Iqbal Husain.Minimization of torque ripple in SRM drives[J].IEEE Transactions on Industrial Eletronics,2002,49(1):28-39.
[4]孙剑波.开关磁阻电机的减振降噪和低转矩脉动研究[D].武汉:华中科技大学,2005.