交流伺服电机在全自动端子压着机上的应用
2011-06-02宋春宁李陟升
宋春宁, 李陟升
(广西大学电气工程学院,广西南宁 530004)
0 引言
全自动端子压着机是近几年出现的一种将线束的切断、剥皮与端子压着等三个主要的线束末端加工工序集成于一体完成的机电一体化机械。新一代的全自动端子压着机具有加工效率高、加工精度高、运行平稳等特点。该应用中的全自动端子压着机每分钟可加工75根线束,平均不到1 s就加工一条线束。剥皮精度可达0.01 ms,运行平稳,噪声小。要想达到这个要求,非常重要的一点就是采用合适的执行电机。
交流伺服电机具有运行精度高、运行平稳、速度响应性能好等优点,且交流伺服系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样,内部构成位置环和速度环,一般不会出现丢步或过冲的现象,控制性能更为可靠。
基于以上特点,全自动端子压着机大多选择交流伺服电机作为系统执行电机。
1 控制系统的组成
控制系统的组成如图1所示,全自动端子压着机可以同时对线束的两端进行加工,分别称为前端加工和后端加工,由于两端加工流程相似。现以前端加工为例进行说明(前端加工的执行电机为1#和2#伺服电机,旋转由1#伺服电机完成,搬送夹固定在2#伺服电机上)。
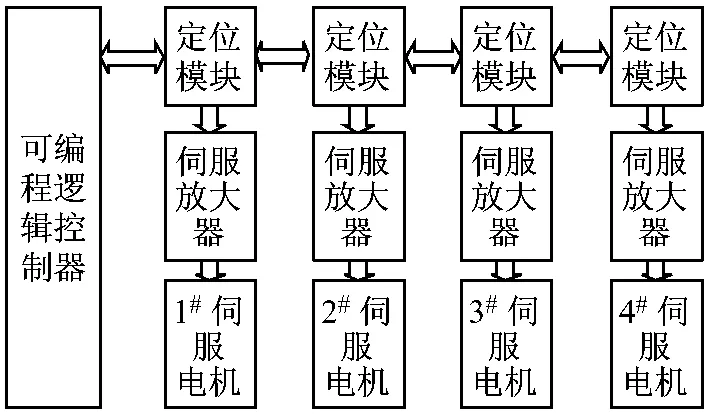
图1 控制系统框图
前端加工流程如下:(1)切断线束后,搬送夹倒退一段距离,然后旋转12°到剥皮台,伺服电机将搬送夹按照预先设定的剥皮长度向前进。(2)剥皮刀刃切入线束后,搬送夹倒退进行剥皮。(3)旋转45°至压着台,在旋转的过程中经过20°位置所示的剥皮检出装置,确认检测出芯线后,搬送夹前进至预先设定的压着位置。(4)压着完成后,返回到原来的位置(给进线)。(5)搬送夹开起,送线滚轴给出所设定长度的电线。前端加工机械动作图如图2所示。

图2 前端加工机械动作图
2 交流伺服系统的组成
选用日本三菱的通用交流伺服放大器MRJ2S,其具有以下优点:(1)具有RS-232和RS-422串行通信功能,通过安装有伺服设置软件的个人计算机就能进行参数设定、试运行、状态显示和增益调整等操作。(2)与MR-J2S系列配套的伺服电机编码器采用了分辨率为131 072脉冲/转的绝对位置编码器,采用高性能的CPU,大大提高产品的响应性。(3)多种系列伺服电机适应不同控制需求,电机上的编码器均支持ABS模式,只要在伺服放大器上另加电池,就能构成绝对位置系统。(4)使用更为方便,具有优异的自动调谐性能,机械分析功能,可以轻松实现抑制机械振动,增益搜索功能,可以自动找出最佳增益值。(5)进行原点回归设置后,即使发生报警也不需要再次原点回归即能正常工作。
选用 MR-J2S兼容的 HC-MFS系列的 HCMFS13(B),HC-MFS43(B)两种型号电机。该系列电机具有超低惯量的特点,特别适用于高频操作。
3 可编程逻辑控制器和定位模块的选择
在该设计中选用三菱的最新一代小型可编程逻辑控制器(Programmable Logical Control,PLC)FX3U作为控制器,该型PLC具有如下功能:(1)PLC上的直接可以连线的输入输出点达到256点。(2)输入输出的扩展设备可以连接FX2N系列的输入输出扩展模块。(3)内置了64 K步的RAM内存。(4)可以通过远程进行RUN/STOP操作,给程序的调试带来了极大的方便。(5)丰富的定位控制指令,可以完成3根独立轴的定位。
选用FX2N-1PG定位模块对伺服电机进行位置控制(FX3U可以扩展FX2N-1PG定位模块)。每组1PG可以完成一个独立轴的定位,是通过向伺服电机的驱动放大器提供指定数量的脉冲来实现的。
4 伺服电机位置控制相关参数设置
4.1 MR-J2S 参数设置
该应用中利用FX2N-1PG定位模块对1#~4#伺服电机进行控制。伺服放大器MR-J2S需要设置的参数有:电子齿轮、加减速时间、脉冲方式等。其中需要注意的是伺服放大器中设置的脉冲方式必须与FX2N-1PG中脉冲方式一致,否则可能导致错误。
4.2 FX2N-1PG定位模块参数设置
定位模块使用FROM/TO指令与PC进行数据传输。FX2N-1PG需要写入的参数有16位和32位两种类型,分别用TO/DTO指令。以1#伺服电机为例,下面依次设置:电机转一圈所需脉冲数;电机转一圈所走过的距离;单位系统,脉冲方式,定位数据放大倍数,原点返回方向,DOG输入极性,停止信号极性;最高速度;基速;原点回归速度(高速);原点回归速度(爬行);原点返回的0点信号数;原点位置;加减速时间;目标位置;运行速度。
5 伺服电机回原点设计
伺服电机回原点速度控制示意图如图3所示。DOG开关是FX2N-1PG定位模块上用来实现回原点的一个输入引脚。本例中设置DOG开关为ON时伺服电机开始减速,OFF时停车。

图3 伺服电机回原点速度控制示意图
传统的伺服电机回原点是通过一个较长的DOG开关,或者两个位置开关来使得高速运行的伺服电机有足够的时间减速到v实现的(v是一个临界速度,只要伺服电机在这个速度以下停车,就能每次都停在同一位置,保证了回原的精确)。但是该方式需要爬行距离较长。在该设计中采用的回原点方式——两次回原点,使得只需要一个光电开关就能实现回原点。原理如下:
发送回原点指令,伺服电机高速v1(BFM 10#和9#)回原点,当近原点信号DOG由OFF变为ON时,伺服电机开始减速。当近原点信号DOG由ON变为OFF时,伺服电机根据Z相信号数确定停车位置(BFM 12#)。本例中BFM 12#为0,所以伺服电机立即停止(注意,没有减速到爬行速度就停止了,且停止位置必须使DOG开关保持ON。清除回原点完成标志位后再次发送回原点指令,重新设置(BFM 10#和9#)为一个较低的速度v2(该设计中为K100),重置的速度只要能使伺服电机在DOG变为OFF前减速到v即可。
实践证明该方法能够使伺服精确的回原点,并且稳定性极高,有效弥补了传统回原点的不足。
6 软件设计
伺服电机的位置由驱动放大器接收的脉冲数来决定。当编码器和滚珠丝杆进给量确定以后,可以通过设置电子齿轮使伺服电机每接收一个脉冲移动0.01mm,或者 0.01°。以 1#伺服电机为例,因为设置了位置数据倍数为100倍,所以在第一次定位到剥皮台时位置参数应写入12,即12×100 ×0.01°=12°;
起动单速定位之前要回原点,初始位置在以原点为基础旋转8°处。那么剥皮台和压着台的绝对位置就是 20°、53°。
采用绝对坐标配合单速定位方式对伺服电机的位置进行控制,这是通过设置FX2N-1PG中BFM 25#参数实现的,使用绝对坐标避免了累积误差的产生。程序中使用FORM指令读出伺服电机当前位置存入D100中,D100分别与各个目标位置进行比较,如果相同则接通对应中间继电器,如果8°定位完成,则M100接通,写入下一个定位数据20°。20°定位完成则写入下一个定位数据53°,如此循环。M288为定位完成标志位,每次定位完成后都自动接通。M258起动单速定位,定位完成后延时一段时间进入下一次单速定位。在程序的最后可以通过跳转指令跳到第一次定位执行处,使程序循环执行。
7 结 语
本文介绍了交流伺服电机在全自动端子压着机上的应用,根据机器装配完成后调整了位置数据的具体数值。伺服电机运转非常平稳,振动小。采用的两次回原点方法使得伺服电机的回原点更加方便、精确。该应用具有很强的工业实用性,本文所采用的全自动端子压着机投入运行半年多以来,运行良好、操作方便、加工效率高。
[1]三菱电机自动化(中国)有限公司.FX-1PG/FX2N-1PG 用户指南[G].2000.
[2]三菱电机自动化(中国)有限公司.MR-J2S-A伺服放大器技术资料集[G].2001.
