电动自行车永磁同步电机矢量控制调速策略的设计
2011-06-02江剑峰曹中圣杨喜军雷淮刚
江剑峰, 曹中圣, 杨喜军, 雷淮刚
(1.上海交通大学电气工程系,上海 200240;2.上海大学自动化系,上海 200072)
0 引言
作为一种清洁环保的交通工具,电动自行车(E-Bike)因其生产和使用方面具有许多优点,市场前景非常广阔。目前为止,E-Bike的电动机大都采用永磁无刷直流电动机(Brushless DC Motor,BLDCM),这种电动机的反馈装置和控制结构都比较简单,生产成本也较低。但是定子电流和气隙磁通为方波或梯形波,带来了转矩脉动大的固有不足,特别是低速时,脉动更加明显,静音效果差。E-Bike量大面广,由蓄电池供电,要求其传动系统具有更高的效率。基于以上考虑,可以采用基于矢量控制的永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)代替 BLDCM,可以克服以上问题。因为PMSM的定子电流和气隙磁通都接近正弦波,转矩波动和系统噪声都有较大改善。新型PMSM的效率可以高达92%。本文基于控制器μPD78F1213实现了上述系统,采用了传统的转子磁链定向PMSM矢量控制调速策略,重点放在了单零矢量开关损耗最小空间矢量脉宽调制(Space Vector Pulse Width Modulation,SVPWM)算法、三相定子电流重构等方面,目的是减少损耗和降低成本。
1 E-Bike驱动器组成与PMSM矢量控制原理
1.1 E-Bike驱动器组成
E-Bike调速控制系统如图1所示。驱动器分为控制电路和功率电路两部分。功率电路由48 V蓄电池电源、分立逆变电路、开关电源组成。控制电路包括MCU μPD78F1213及其外围器件、6路分立绝缘栅双极晶体管(Insulated Gate Bipolar Transistor,IGBT)驱动电路、直流回路电流检测电路、编码器脉冲整形以及速度给定、刹车和倒车等电路。
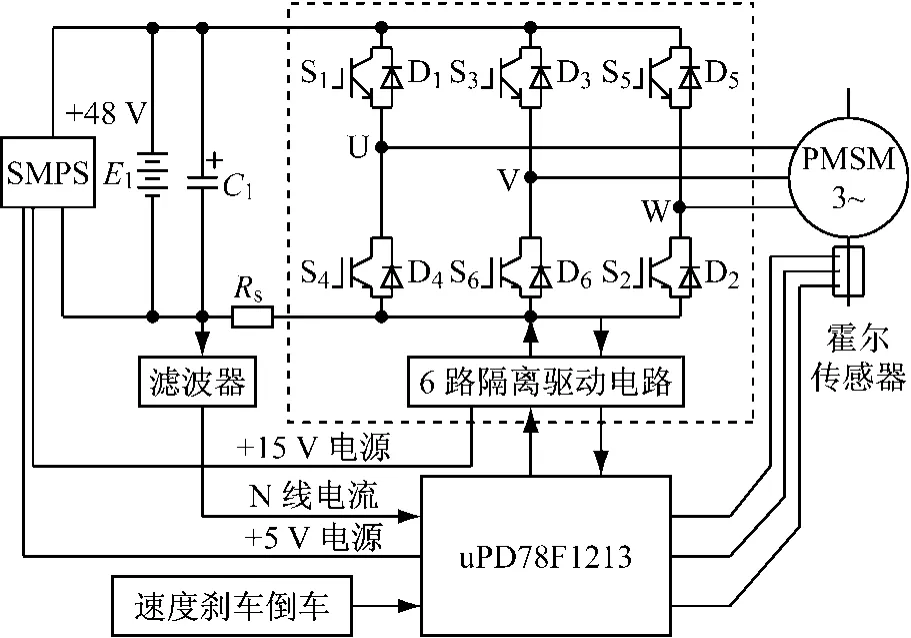
图1 控制系统框图
在E-Bike控制中,速度信号通过转把给定的模拟信号,经过滤波后传送到MCU的A/D转换输入口。刹车信号直接由模拟电路转换成高低电平传送到MCU的外部中断口。倒车信号直接由模拟电路转换成高低电平传送到MCU的外部输入口。
控制器 μPD78F1213的内部已经集成了PMSM电动机控制的全部资源,大大降低了系统的复杂性。利用它完成以下主要功能:(1)矢量控制运算,包括速度环与电流环控制算法、单零矢量开关损耗最小SVPWM和转速计算;(2)辅助程序,包括A/D转换与滤波、外中断服务与PWM波形发生等;(3)各种辅助功能,包括电力辅助刹车、速度给定错误保护、限速、电机锁定保护等。
1.2 PMSM的数学模型
对PMSM作如下假设:(1)忽略铁心磁饱和;(2)不计铁心涡流和磁滞损耗;(3)永磁材料的电导率为零;(4)相绕组中感应电动势波形为纯正弦波,可以得到PMSM在d-q坐标系下的数学模型如下:
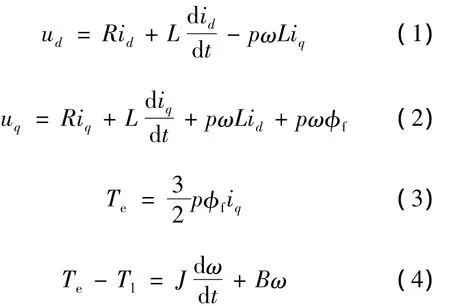
式中:ud、uq——d、q 轴定子电压分量;
id,iq——d、q 轴定子电流分量;
R,L——定子相电阻和相电感;
p——转子极对数;
ω——转子角速度;
φf——转子磁链;
Te——电磁转矩;
Tl——负载转矩;
J——转子侧转动惯量;
B——阻尼系数。
由式(3)可知,如果id=0,当转子永磁体磁链确定后,电机的转矩便取决于定子电流的iq分量。矢量控制实际上就是对电动机定子电流矢量的相位与幅值进行控制,以达到控制电机转矩的目的。
1.3 矢量控制基本原理
PMSM矢量控制的基本原理是:将同步电动机在三相坐标系下的定子电流Ia、Ib和Ic,通过三相-两相变换(Clarke变换),等效成两相静止坐标系下的交流电流Iα和Iβ,再通过按转子磁场定向旋转变换(Park变换),等效成同步旋转坐标系下的直流电流Id和Iq。Id相当于直流电动机的励磁电流,Iq相当于与转矩成正比的电枢电流。然后采用直流电动机的控制方法,求得PMSM控制量,经过上述坐标逆变换,实现对PMSM的控制。其实质是将PMSM等效为直流电动机,分别对速度、磁场两个分量进行独立控制。E-bike PMSM矢量控制系统原理如图2所示。

图2 E-Bike PMSM矢量控制系统原理
根据霍尔元件发送来的三路PWM信号,MCU计算出转速信号和转角信号。转速信号与转速给定比较,通过PI控制器算出定子电流q轴参考值。再由电路检测出的直流母线电流重构出定子三相电流,根据磁势和功率不变的原则进行正交变换,将其从三相静止坐标ABC变到两相静止坐标αβ,即Clark变换,再将两相静止坐标变为两相旋转坐标dq,即Park变换。这样三相定子电流就分解为两个分量。再分别与它们的参考值相比较,经过PI调节器可获得控制量Ud和Uq。这两个量经Park逆变换后即得到Uα和Uβ,再根据单零矢量开关损耗最小SVPWM合成方法合成所需的控制矢量,达到矢量控制的目的。实际上外环速度环负责产生定子参考电流,内环电流环负责得到实际控制信号,从而形成了一个完整的速度矢量控制系统。
2 单零矢量SVPWM与定子电流重构
2.1 单零矢量SVPWM算法
SVPWM控制的目的是把电压源逆变器和交流电动机视为一体,按照跟踪圆形旋转磁场来控制逆变器工作状态,实质就是一种在三相正弦波中注入了零序分量的调制波进行规则采样的变型正弦脉宽调制(Sin_Wave Pulse Width Modulation,SPWM)。与直接的SPWM相比,SVPWM在输出电压和电机线圈中的电流都将产生更少的谐波,开关次数少、功耗小、直流母线电压利用率高。
在不同的导通状态下,三相逆变桥的6个开关管可以产生不同的电压基本矢量。SVPWM算法就是通过一个周期内切换这些电压矢量,改变开关管导通时间来合成所需要的电压矢量。电压空间矢量合成图如图3所示。

图3 电压空间矢量图
参考图1中的逆变器功率回路,S1~S6表示6个开关,它们可以形成8种开关状态,代表着8个电压矢量。1表示上管开通,下管关断。0表示下管开通,上管关断。8个电压矢量可分别表示为 U(000)、U(100)、U(110)、U(010)、U(011)、U(001)、U(101)和 U(111),其中 U(000)和U(111)为零矢量,表示电动机三相定子被短路。以这8种不同工作矢量形成的实际磁链来追踪三相对称正弦波供电时定子的理想磁链圆,即可得到PWM时的等效基准磁链圆。
如图3所示,整个空间被划分为6个扇区,要合成输出电压矢量,首先要确定参考矢量在哪个扇区。假设合成矢量在第一扇区,则其计算公式为

其他扇区确定方法与此类似。
当Ux旋转到某扇区时,例如扇区1。记Ua=U(100);Ub=U(110)。tα、tβ分别为其作用时间。t0为零矢量U(000)或U(111)作用时间。可得:
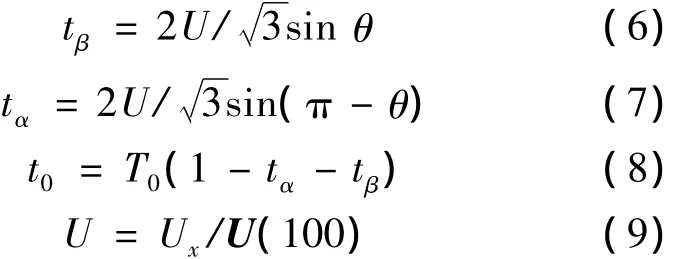
通过计算可以得出调制驱动波形。由图3可知,任意相邻的三个矢量都有且仅有一位相同(为1或0)。所以最多只有一相桥臂不工作,从而最多可将开关总次数减少1/3。该系统采用单一零矢量调制方式,属于非对称调制,即在矢量图的所有区域中都使用同一零矢量U(000)。这样可以有效降低调制过程中的开关损耗。
2.2 PMSM定子电流重构
矢量控制法需要对电机的相电流进行闭环控制。这就需要对相电流进行检测,该设计采用直流母线电流检测获得相电流的方法,不仅减少传感器数量、降低成本,还可以消除由于电动机线路电流传感器增益不相等造成的压降不均衡问题。
母线电流可以通过开关状态与网侧交流电流联系起来。反过来,若母线电流已知,且三相桥的开关状态确定,则网侧某相电流可以构造出来。对于不同的电压空间矢量,相电流与直流母线电流的对应关系如表1所示。

表1 各开关状态下母线电流与相电流关系
任何时刻只能重构出一相电流,若能在一个开关周期中分时重构出两相电流,则第三相可根据三相电流和为0原则算出。但是考虑到死区时间、器件开通时间以及A/D转换时间,该方法并不能可靠地实现电流重构。因此,对SVPWM波形进行了简单修正,对PWM波形平移。采用这种非对称的方法提高了采样精度,但同时也给系统的动态性能带来一定的影响。
3 试验结果与分析
基于以上调制算法和调速策略,搭建实际电路进行试验。E-Bike传动系统的主要电气指标如下:额定输入直流电压为48 V,额定输出功率为350 W,PMSM的额定转速为300 r/min。估算整机效率为 75%,选择 IGBT RJH60F7ADPK,600 V,100°C时通态电流为50 A。驱动器件采用分立器件。蓄电池并联电容为470 μF。
系统软件包括以下几个部分:主函数、霍尔中断、速度计算、转速回路、电流回路、定时器中断、空间矢量计算和过电流保护功能等。
PMSM转子位置与电压空间矢量间有着确定的位置关系,因此对霍尔传感器输出转子位置信号进行角度细分,得到准确的电压空间矢量位置。角度细分的基本原理是:对电动机位置信号采用了锁相分频技术,将由霍尔元件检测输出的位置信号进行倍频,倍频后的输出信号每个周期脉冲就代表着更小的电角度,从而可获得更丰富的转子位置信息。该系统采用软件方法进行角度细分,在细分的过程中必然会有一定误差,故通过霍尔输出信号每隔60°电角度对转子位置进行一次校正。
改变速度给定时,可以观测到电机速度也在跟随变化,改变电动机负载时,电机速度可以保持恒定。图4给出了同步电机运行时两相反电动势对应的线电压波形。

图4 两相反电动势对应的线电压波形
图5给出了MCU发出的两路上管PWM控制波形,试验所采用的是下管常通零矢量的最小开关损耗SVPWM算法,相当于调制正弦波中注入了一种特殊的零序分量。
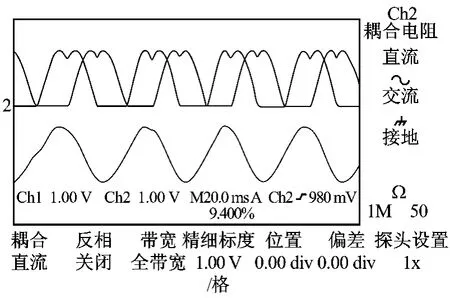
图5 MCU输出的PWM控制波形
当改变电机的速度和负载时,可以测得电流波形,如图6(a)和6(b)所示。其中100 mV代表1 A的相电流,带负载转矩分别为空载和8 N·m。
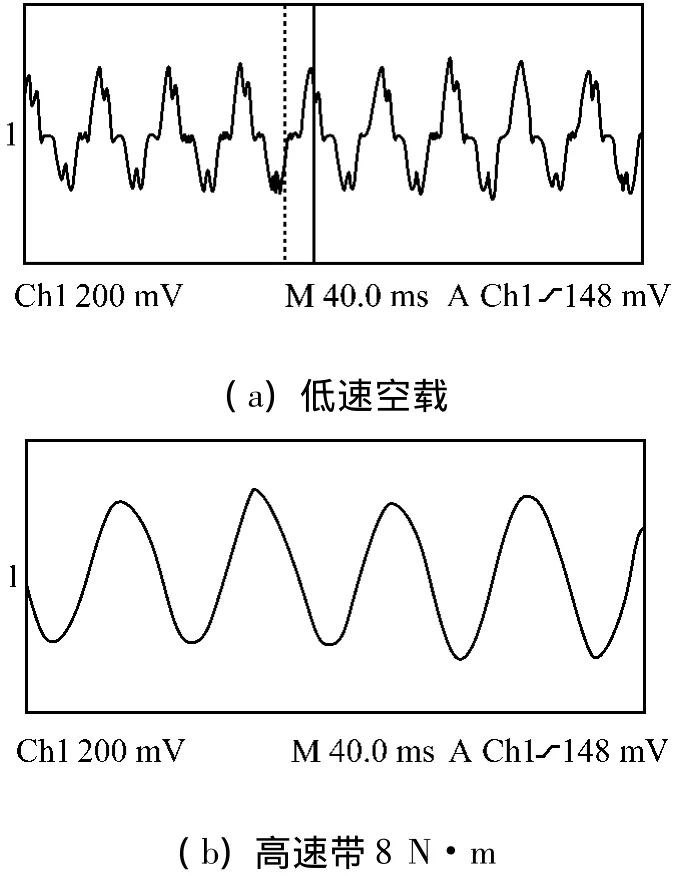
图6 电机相电流
4 结 语
根据 E-Bike的工作要求,基于单片机uPD78F1213,研究了一种基于PMSM矢量控制调速策略的设计方案,主要工作包括转子磁链定向PMSM矢量调速、单零矢量开关损耗SVPWM、三相定子电流重构。试验结果表明上述设计方案可行,具有效率高、成本低和调速性能高的优点。
[1]陈伯时.电力拖动自动控制系统-运动控制系统[M].3版.北京:机械工业出版社,2003.
[2]冯垛生,曾岳南.无速度传感器矢量控制原理与实践[M].北京:机械工业出版社,2006.
[3]阮毅,陈维钧.运动控制系统[M].北京:清华大学出版社,2006.
[4]张广栋,闫在春,于涛.基于NEC电子μPD78F1213的单电阻采样BLDC矢量控制系统[J].电子应用技术,2009,35(3):10-12.
[5]陈荣.永磁同步电机控制系统[M].1版.北京:中国水利水电出版社,2009.
[6]顾义坤,倪风雷,杨大鹏,等.基于母线电流传感器的相电流重构方法[J].电机与控制学报,2009,13(6):811-816.
[7]张佳.基于TMS32OF2812的永磁同步电机矢量控制系统研究[D].吉林:吉林大学,2009.
[8]熊健,康勇,张凯,等.电压空间矢量调制与常规SPWM的比较研究[J].电力电子技术,1999,33(1):25-28.
[9]黄海,李白雅,李强,等.基于最小开关损耗的SVPWM调制技术[J].自动化与仪表,2007(1):5-9.
