无刷直流电机的指数趋近律滑模变结构控制
2011-06-02李运德
李运德, 张 淼
(广东工业大学,广东广州 510006)
0 引言
无刷直流电机(Brushless DC Motor,BLDCM)由于结构简单、出力大、调速性能良好等优点,在工业领域中得到了广泛应用。但是BLDCM的齿槽转矩和非理想的方波输入等多方面原因,使得该电机的转矩波动比较明显,这就很大地限制了其在较高精度的伺服系统中的应用。
随着对控制精度、速度以及对环境变化的适应能力的要求越来越高,经典PID逐渐暴露其缺点。采用传统的PID方法控制BLDCM难以达到高性能的要求,并且在实际工业生产过程中整个系统往往具有非线性、时变不确定性,对于本来就在这方面存在缺陷的PID更难以取得理想的效果。
为了提高系统的鲁棒性,本文提出采用趋近律的滑模变结构的方法,设计滑模变结构控制器来控制BLDCM,并采用MATLAB软件进行仿真验证。结果表明,控制系统具有超调量小、响应速度快、抗负载扰动能力强等良好的控制性能[2,8-9]。
1 BLDCM的数学模型
BLDCM一般由电机本体、逻辑驱动电路和位置传感器三部分组成。以三相星型连接BLDCM为例,电机的转矩方程为

式中:Te——电磁转矩;
ea、eb、ec——定子绕组的反电动势;
ia、ib、ic——定子绕组的相电流;
ω——转子角速度。
当BLDCM运行在120°导通的工作方式下,且不考虑换相暂过程,三相Y接定子绕组中只有两相导通,其电流大小相等且方向相反。这样式(1)可简化为

式中:KT——电机转矩系数;
i——稳态时绕组相电流。
忽略粘滞摩擦系数的影响,电机运动方程为

式中:TL——负载转矩;
J——转动惯量[3]。
2 滑模变结构控制器设计
滑模变结构控制方法的设计和实现都相对简单,而且比较适合功率电子器件的“开关”工作模式。由于滑模模态可以进行设计且与系统参数变化及扰动无关,使得滑模变结构控制具有快速响应、对参数变化及扰动不敏感等特点。因此,当系统进入滑动模态以后,对系统的干扰和摄动具有很好的自适应性,基本不受系统参数变化和外界干扰的影响,其高速切换特性对于电机负载的变化和绕组换相引起的电流波动也均具有较好的抑制功能。如图1(a)所示,为滑模变结构控制的相轨迹图[1,4],图 1(b)为仿真得到的相轨迹图。

图1 滑模变结构控制相轨迹图
当系统状态向量穿越开关面时,反馈控制的结构就发生变化,并一直在滑模区域内运动而不受系统参数、扰动等因素的影响,从而使系统达到所期望的指标。
2.1 指数趋近律
一般,滑模变结构控制在滑动模态下会产生高频抖振,为了减弱抖振可以采用趋近率的方法。
指数趋近律表示为

其中:k>0,δ>0,s为滑模切换函数,sign是符号函数。
在指数趋近律中,趋近速度从较大的值逐步减小到零,这样,不仅缩短了趋近时间,还使运动点到切换面时的速度很小。通过调整指数趋近律的参数k和δ,既可以改善滑动模态到达过程的动态品质,又可以减弱控制信号的高频抖振。
2.2 滑动模态的到达条件和稳定性
系统的初始点可在状态空间的任意位置,但在系统运行后,为了使系统正常起动滑模运动,则要求运动点在有限的时间内到达切换面s=0,即系统的运动必须趋于切换面。到达条件[5]为

根据式(4),得


2.3 控制器设计
令状态量为

式中:x1——速度误差;
x2——速度滑模变结构调节器输入;
ωr——给定转速;
ω——电机的实际转速。
把式(2)、式(3)代入式(9),得系统在状态空间的数学模型为

选取滑模切换函数为

式中,c为常数,且 c>0。由式(4)、式(11),得

再由式(10)、式(12),得

对式(13)进行微分计算,可得滑模变结构调节器输出,即电流给定u=ir为

在滑动模态:

到达切换面s=0,得通解为

其中,a为常数。由式(16)得:

可知,t趋于无穷时,ae-ct沿指数曲线趋于零,使得实际速度趋近于给定速度,可认为ω=ωr,因此能实现转速无超调的跟踪而使系统达到稳定状态。
为更好地解决滑模控制存在的抖振问题,采用准滑动模态控制原理,即使一定范围内的状态点均被吸引到切换面的某一邻域内,或称为切换面的边界层。因此,用饱和函数sat(s)代替滑动模态中的符号函数sgn(s),sat(s)的表达式为

式(18)中,Δ为边界层。当运动点在边界层外,切换控制起作用;运动点在边界层内,则线性化反馈控制起作用。在边界层内时,准滑动模态不要求满足滑动模态的存在条件,因此不要求在切换平面上进行控制结构的切换,可从根本上避免或削弱抖振。
3 MATLAB仿真试验
根据上面的理论分析,为了验证指数趋近律滑模变结构控制器对BLDCM进行控制的可行性,本文使用MATLAB/Simulink软件对系统进行仿真,对BLDCM参数设定如下:定子电阻 R=2.875 Ω,定子电感 L=8.5 mH,转子磁通 φf=0.175 Wb,转动惯量 J=0.000 8 kg·m2,反电动势平顶波为120°。图2所示为BLDCM的控制系统框图。
设仿真时间为0.1 s,给定速度为300 r/min,初始负载转矩为0 N·m,在0.05 s时突然增加速度,使其变为500 r/min,通过仿真分析控制系统的性能指标(包括上升时间tr、超调量σ和调节时间ts)和抗扰性能指标(包括转速降落ΔCmax和恢复时间tv)以及各因素的影响[7]。图3所示为两种速度下速度和转矩的仿真波形。

图2 BLDCM控制系统框图

图3 300 r/min和500 r/min的转速和转矩波形
对图3中转速和转矩波形进行分析,在转速为300 r/min时,速度能在极短的时间内就能跟踪上给定速度;当在0.05 s时突然加速到500 r/min,速度仍能快速到达期望速度;两种速度下均能实现无超调;转矩也非常稳定,并未出现明显的转矩脉动。图3对应的性能指标如表1所示。
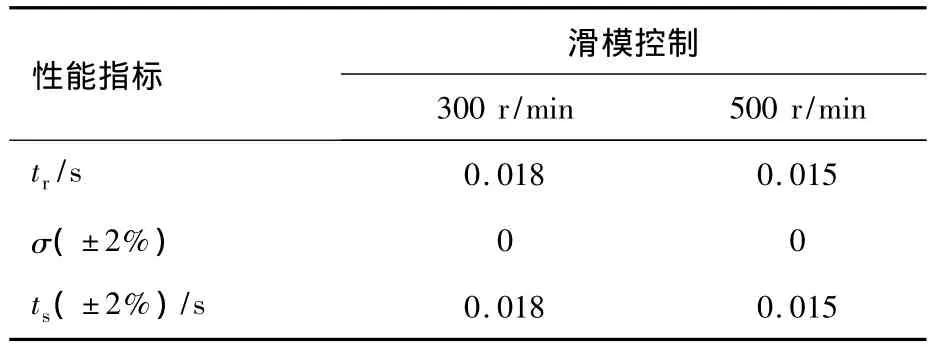
表1 性能指标
由于图3中没有加负载,因此,再对控制系统在突加负载的情况下进行仿真。仿真时间仍为0.1 s,给定速度为 500 r/min,在 0.05 s时突然增加1 N·m的负载,仿真结果如图4所示。

图4 500 r/min的转速和转矩波形
对图4中转速和转矩波形进行分析,转速亦能快速达到给定值,虽然在0.05 s时突加负载,系统也只稍微发生一点变化,又能立即回到原给定值,实现无超调调速,受负载干扰后的转速降落也可认为是零,同时稳定后的转矩也没有特别的转矩脉动。图4对应的性能指标如表2所示。

表2 性能指标
由以上两种情况对所设计的指数趋近律滑模变结构控制器进行分析可知,该控制器能实现快速跟踪的功能,较明显的效果就是没有出现超调,极大地抑制了外界干扰的影响,符合设计要求。
4 结语
本文通过分析BLDCM控制系统,并对速度控制环节进行指数趋近律滑模变结构控制策略设计,所设计方法简单,易于实现。滑模变结构控制由于其自身的设计方法,使它具有克服系统外界干扰和内部参数摄动的良好特性;当系统处于滑动模态时,系统状态的转移不受原有参数变化和外部扰动影响,具有完全自适应性和鲁棒性。仿真结果证明,指数趋近律滑模变结构控制系统具有响应速度快、误差小、无超调、抗干扰能力强和实时性能好等优点,极大地提高了控制系统的稳态性能。
[1]汪俊杰,周波,马长山.基于前馈控制的BLDCM滑模变结构调速系统[J].电工技术学报,2008,23(8):41-46.
[2]夏长亮,刘军华,俞卫.基于扩张状态观测器的永磁BLDCM滑模变结构控制[J].中国电机工程学报,2006,26(20):139-143.
[3]童克文,张兴,张星,等.基于新型趋近律的永磁同步电动机滑模变结构控制[J].中国电气工程学报2008,28(21):102-106.
[4]Miki Shichijo,Ryuichi oguro.Model following control with a sliding mode adjustment for a positioning system[C]∥ SICE-ICASE International Joint Conference 2006:292-295.
[5]Peter Korondi,Zoltan Petres.Sliding mode control based on tensor product model transformation[C]∥Mechatronics,IEEE International Conference,2006:672-677.
[6]Zhang Bin,Li Yao Hua.A PMSM sliding mode control system based on model reference adaptive control[C]∥ Power Electronics and Motion Control Conference,2000:336-341.
[7]李运德,张淼,孙兴中.基于内模控制的永磁同步电机调速系统设计[J].微特电机,2010,38(5):56-59.
[8]贾洪平,贺益康.永磁同步电机滑模变结构直接转矩控制[J].电工技术学报,2006,21(1):1-6.
[9]胡强晖,胡勤丰.新型全局滑模控制在永磁同步电动机中的应用[J].电机与控制应用,2010,37(2):13-16.
