基于MCF5213的开关磁阻电机控制系统设计
2011-06-02谢方南朱莉莉刘俊纯
谢方南, 朱莉莉, 刘俊纯
(中国矿业大学信电学院,江苏徐州 221008)
0 引言
开关磁阻电机调速(Switched Reluctance Drive,SRD)[1-2]系统是一种新型可控调速系统,其具有结构简单、调速性能优良、输出特性变化灵活等优点。但是SRD自身具有严重的非线性特性[3],使得建立其精确数学模型的计算相当繁琐[4]。常规的线性系统控制方法和传统的低端微控制器[5-6]难以取得理想的动、静态性能。随着现代控制理论在SRD系统中的应用逐渐增多,以及微电子器件的飞速发展,为SRD系统的高性能控制提供了可能。
本文以三相12/8极、500 W开关磁阻电机(Switched Reluctance Motor,SRM)为控制对象,设计了以MCF5213为核心的SRM控制系统,这是一款集成了数字信号处理器(Digital Siginal Processor,DSP)的计算能力和微控制单元(Micro Controller Unit,MCU)的控制器特性的数字控制器[7]。本文详细介绍了系统的硬件结构和软件实现方法,并通过试验验证了方案的可行性。
1 SRD系统组成
SRD控制系统主要由SRM、功率变换器、控制器和位置检测器及电流检测器组成,系统结构如图1所示。

图1 SRD控制系统结构示意图
SRM是SRD实现机电能量转换的执行元件,其运行遵循磁阻最小原理,即磁通总要沿着磁阻最小的路径闭合,由磁场扭曲产生切向磁拉力,从而产生磁阻性质的电磁转矩。
该系统采用三相不对称半桥功率变换电路,其结构如图2所示。

图2 三相不对称半桥结构
相桥臂均由两个主开关管和两个续流二极管构成。在电压脉宽调制(Pulse Width Modulation,PWM)斩波控制方式下,考虑单管斩波的电流波动比双管斩波小,为了减小转矩脉动,该系统采用每相的上开关管V1、V2、V3的驱动信号为 PWM斩波信号,下开关管V4、V5、V6的驱动信号为各相的位置开通关断信号。其工作原理以A相为例,每相有两个主开关管 V1、V4及续流二极管VD1、VD4。在开通期间,主开关管V1和V4导通,PWM信号斩波时,V1关断,相电流 iA经 V4和VD1续流;关断换相期间,V1和V4关断,相电流经两只续流二极管VD1和VD4续流。
控制器是根据控制指令综合处理由位置检测器和电流检测器传输的转子位置信号及相电流信号的中枢,通过控制功率变换器中主功率开关器件的工作状态,实现对SRM运行状态的控制。
2 控制系统的硬件结构
MCF5213是飞思卡尔半导体公司推出的基于ColdFireV2内核的32位微处理器。其具有集成度高、运算速度快等优点,为实现较复杂的控制算法提供了可能,使系统的控制性能得以保证。同时它提供了许多外围模块,如PWM模块、模数转换器(Analog Digital Converter,ADC)、定时器、串行通信外设(UART、QSPI、IIC)以及片上 Flash和RAM,使芯片的使用效率得到了较大提高,大量简化了系统的硬件配置。基于MCF5213的SRM控制系统的硬件结构如图3所示。
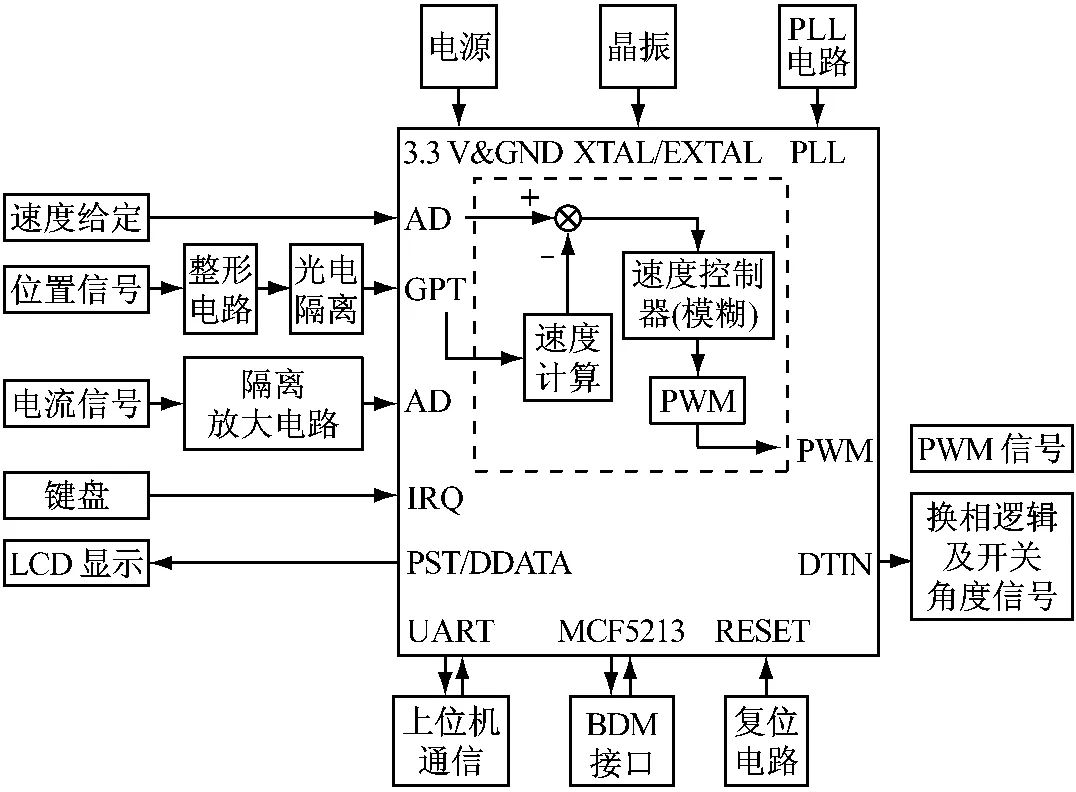
图3 基于MCF5213 SRM控制系统
2.1 最小化系统
系统的最小化系统主要包括电源及其滤波电路、复位电路、晶振电路及PLL滤波电路、写入器接口电路等。
2.2 位置及速度检测
位置检测的目的是确定定子和转子的相对位置,然后将位置信号送到控制器,以确定相绕组的通断,并且实现转速闭环控制。MCF5213的通用定时器具有输入捕捉、输出比较功能。输入捕捉功能可以检测信号的跳边沿并记录发生跳变的时间,输出比较功能可以在规定的时刻,产生一个期望的输出信号,实现对外部电路的控制。光敏传感器输出的转子位置信号经过整形后接入到输入捕捉引脚,通过记录转子信息的连续跳变沿,利用软件计算输入信号的周期和脉宽,得到电机的实时转速。同时,根据位置传感器产生的脉冲信号经过微处理器的逻辑判断处理,利用定时器的输出比较功能,在规定的时刻输出需要的功率开关的驱动信号,调整开关管的开通、关断角。
2.3 电流检测
电流检测电路通过霍尔检测元件(LEM模块)来检测绕组电流和主电源回路电流,实现SRM运行状态控制及电机过电流保护。MCF5213内含有8通道12位A/D转换模块,A/D转换的时钟频率最高为5 MHz,采样速率高达1.66×106/s,8路A/D转换总时间只要26.5个ADC时钟周期(5.3 μs)。检测电流经过隔离放大与MCF5213的A/D转换单元连接,实现电流的实时检测。系统的给定速度也可以从ADC引脚读取。
2.4 PWM输出
MCF5213内置了功能强大的PWM控制器,PWM模块能够配置为4通道16位或8通道8位的PWM发生器,所有通道都可以软件编程。PWM的每个通道都是独立的,都可以产生不同占空比的PWM波形。输出的波形可以是左对齐或者中间对齐格式。通过程序设置可以产生频率固定、占空比可控的PWM信号。在电压PWM控制方式下,通过PWM技术将直流电源调制成具有一定频率、宽度可调的方波脉冲电压,用来调节电机绕组两端外加电压的大小,单片机把检测到的SRM实际转速与给定转速相比较,通过模糊调节器调制PWM脉冲的占空比,使该占空比与保持给定转速所需要的电压大小相对应,实现对SRM的调速控制。
2.5 上位机通信
MCF5213自带通用异步收发器,支持半双工和全双工的数据传输。通过RS-232串行通信协议与上位机通信,实时监控电机运行的转速、电流等。同时,上位机也可以发送指令给单片机,控制SRM的运行。在用RS-232总线进行串行通信时,需要外接电路实现电平转换。由于MCF5213采用3.3 V供电,故系统选用单一3.3 V供电的SP3232芯片实现上位机和单片机的通信。
3 控制策略与软件设计
3.1 控制策略
由于SRM模型严重的非线性,在不同的控制方式下,其参数、结构都是变化的,普通定参数的PID调节器难以达到理想的控制效果。为了获得良好的SRD调速性能,采用一种鲁棒性能好,适合于非线性、变结构系统的模糊控制。
对SRD的三个可控参数相绕组电压Us、开通角θon和关断角 θoff,系统通过模糊控制器调节PWM信号的占空比,控制相应绕组相电压,实现转速闭环控制,另外两个参数θon、θoff是转速和相电流的函数,在运行中应不断加以调整,以优化系统性能。因此,该系统采用角度控制与电压PWM斩波相结合的控制方式。
模糊控制器采用双输入、单输出结构,输入量为转速偏差e和偏差变化量Δe,输出量为电压PWM控制信号占空比增量u。原理框图如图4所示。

图4 模糊控制器原理框图
图4中,Ge和 GΔe为量化因子,Gu为比例因子,E和ΔE分别为输入量e和Δe模糊化后的模糊子集,U是输出量u的模糊子集。则控制策略可以用一组模糊条件语句描述:

由模糊推理合成规则,得到输出控制量模糊集。经解模糊求得输出控制增量U,将其乘以比例因子Gu,得到实际输出PWM占空比增量u。
为了提高系统的调速控制精度,单片机初始化时将PWM通道配置为16位的发生器,提高PWM波的分辨率,从而大大提高了模糊控制器的输出量,即PWM占空比增量u的分辨率,使得系统调速性能更加稳定、精确。同时,为了提高系统的响应速度,当电机实际转速与给定转速相差较大时,将模糊输出的PWM占空比增量u扩大一定的倍数,作为实际输出的占空比增量,并且在一定时间内增加调用模糊程序的次数,这样就缩短了获得与给定转速相应的占空比调节时间,达到快速响应的调速目的。
通过改变开通角和关断角,可控制绕组中的电流大小和波形形状,从而影响输出转矩的大小和正负,有效调节SRM的输出功率和转矩,实现SRM的优化控制。
3.2 软件设计
控制系统的软件主要由初始化程序和MCF5213控制程序等组成。初始化程序在主程序里调用,控制程序在中断服务子程序中完成。控制系统主程序流程图如图5所示。

图5 控制系统主程序流程图
初始化程序主要包括:软件变量定义及赋值、控制寄存器设置、中断向量定义、时钟频率设定、PWM初始化、A/D转换初始化、I/O初始化、UART初始化、外部中断初始化及各功能模块的初始化。
MCF5213控制程序是整个系统软件的核心组成部分,包括起动子程序、转速计算中断服务子程序、转速控制中断服务子程序、PWM模糊调制子程序、串口中断服务子程序、上位机通信子程序、液晶显示子程序、停车子程序等。
系统在改变开关角时无需添加任何硬件,直接利用定时器的输入捕捉、输出比较功能即可实现,其程序流程图如图6所示。
当定时器的输入捕捉引脚捕获到位置信号的跳变沿时,进入中断。在输入捕捉中断程序中,记录当前跳变沿发生时的计数器值,并与上次发生跳变时的计数器值相比较,计算出位置信号的周期,从而得到每度转子位置信号对应的计数器值。根据所要调整的开通、关断角,设置定时器的输出比较值,并允许发生比较中断,在输出比较中断程序中,调整各开关管的开通、关断驱动信号,实现SRM调速的变角度控制。

图6 角度控制程序实现流程图
4 试验结果
图7(a)、(b)、(c)分别是给定转速为400 r/min、800 r/min及1 200 r/min时的电机实际转速动态测试曲线及其相应的相电流波形。
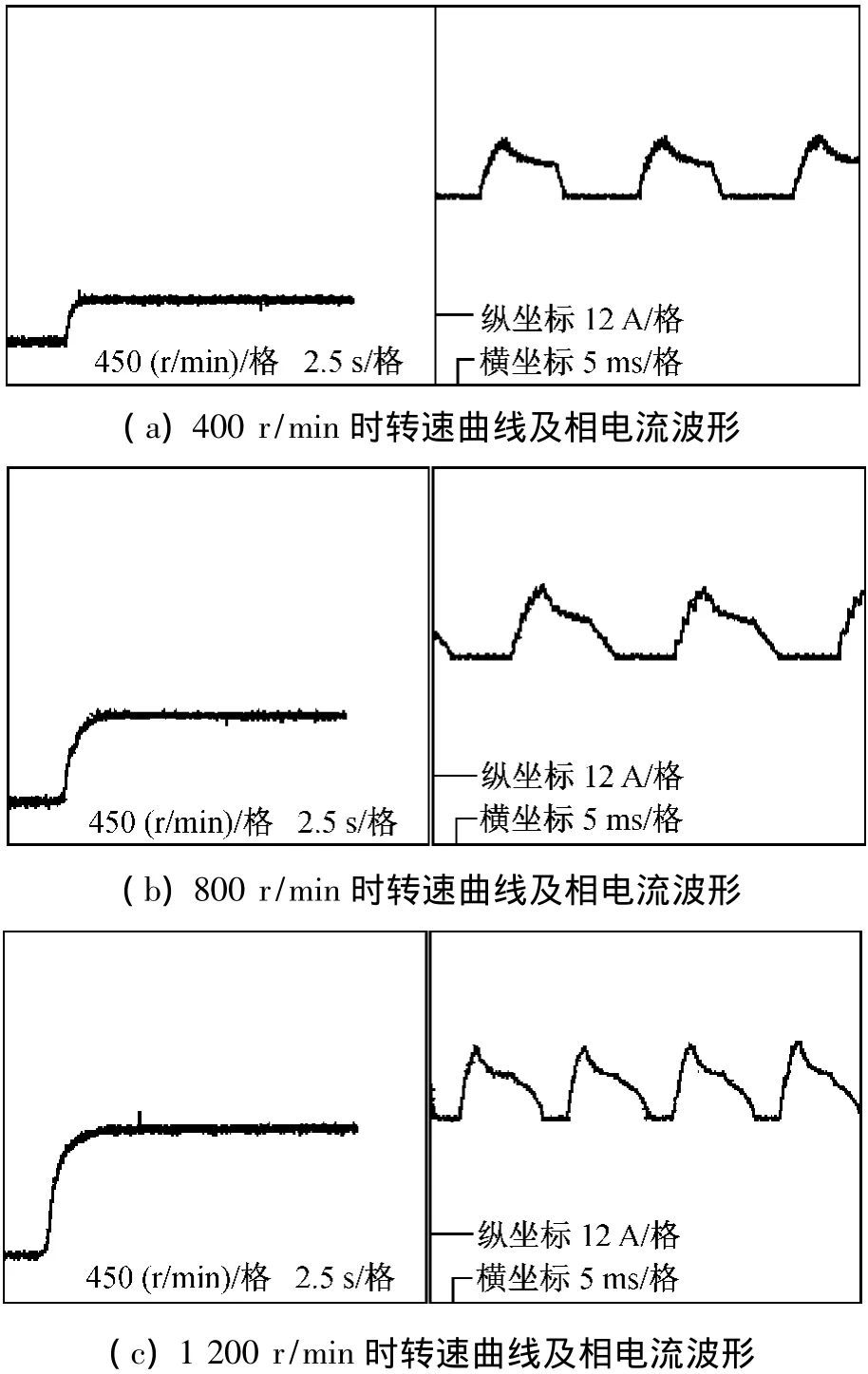
图7 各转速下的系统实时动态测试曲线及其相电流波形
试验结果显示在采用模糊调制PWM占空比方式下,电机能够在较大的调速范围内较快地达到给定转速,且超调较小。
图8(a)、(b)分别为SRM转速为800 r/min的情况下,采用全角度运行(即开通角θon为0°,关断角 θoff为22.5°)和采用变角度运行方式下(即开通角提前2°,关断角提前6°)的输出波形图。图中示波器3个通道分别表示一相位置信号UPA、该相的MCF5213输出的驱动信号UGA,以及该相的电流信号iA。UPA、UGA纵坐标为10 V/格,iA纵坐标 12 A/格,横坐标均为 2.5 ms/格。图8(a)、(b)中电流峰值分别为 18.32 A、19.68 A。
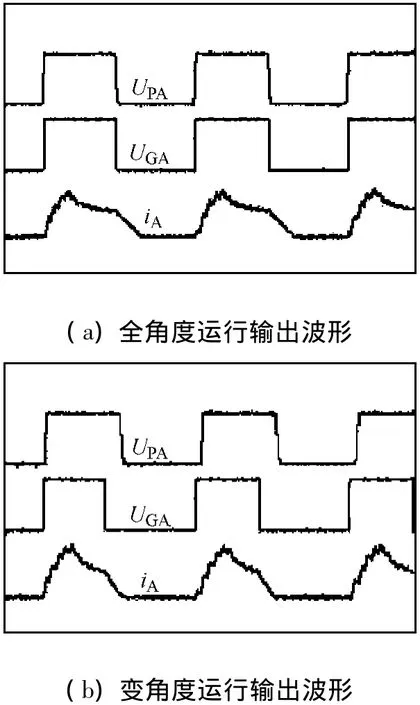
图8 转速为800 r/min时位置信号、驱动信号及电流波形
由图8可见θon减小,电流峰值ip增大,同时电源供电时间加长,有效电流增大。θoff的提前可有效减少制动转矩,从而得到较大的有效转矩。
5 结语
本文分析的SRD系统充分利用了MCF5213单片机的高速运算能力和丰富的外围集成模块,系统结构简单紧凑、控制灵活,提高了系统的可靠性,实现了SRM的数字化控制。试验结果表明,该调速系统具有良好的静态特性和动态性能,抗干扰性好,控制精度高;能够在电机运行的高速阶段实现角度位置控制,有效减少运动反电动势,实现电机的优化控制;同时也说明设计的基于MCF5213的SRM控制系统可以作为实现各种控制策略的试验平台。
[1]陈昊.开关磁阻调速电动机的原理设计应用[M].徐州:中国矿业大学出版社,2000.
[2]王宏华.开关型磁阻电动机调速控制技术[M].北京:机械工业出版社,1995.
[3]Chen H,Ji L.Nonlinear model and simulation of switched reluctance servo motor direct-drive system[J].Dynamics of Continuous,Discrete and Impulsive Systems,Series A:Mathematical Analysis,2006(2):1961-1968.
[4]Chen H,Xie G.Nonlinear mathematical model of switched reluctance machine system[C]∥Proceedings of the 2004 IEEE Systems,Man,and Cybernetics Conference,2004(10):6054-6060.
[5]Chen H,Xie G.80C31 single chip computer control of the switched reluctance motor for locomotive in coal mines[C]∥Proceedings of 5th International Conference on Electrical Machines and Systems,2001(8):604-607.
[6]Chen H,Su T.Control of the switched reluctance motor drive at four quadrants based on intel 87C196KC single chip microprocessor[J].Dynamics of Continuous,Discrete and Impulsive Systems,Series B,2005:306-311.
[7]王宜怀,陈建明,蒋银珍.基于32位ColdFire构建嵌入式系统[M].北京:电子工业出版社,2009.
