基于解重扩算法的GPS抗干扰实时接收机研究
2011-05-31吴仁彪胡铁乔
吴仁彪,李 晓,胡铁乔,卢 丹
(中国民航大学天津市智能信号与图像处理重点实验室,天津 300300)
基于解重扩算法的GPS抗干扰实时接收机研究
吴仁彪,李 晓,胡铁乔,卢 丹
(中国民航大学天津市智能信号与图像处理重点实验室,天津 300300)
提出了一种基于解重扩算法的GPS抗干扰实时接收机系统的硬件实现方案。此方案充分利用解重扩算法和GPS接收机的特点,将两者紧密耦合,并根据FPGA和DSP的不同性能,实现了资源的合理配置。实测数据验证表明,该系统不仅能够抑制干扰信号,而且可对卫星信号产生较大增益,实现多波束抗干扰。
GPS;抗干扰接收机;解重扩算法;多波束
全球定位系统(global positioning system,GPS)是一种全球化的卫星导航定位系统,可以为用户提供经度、纬度、高度以及时间等信息,具有性能好、精度高、应用广等特点。但是GPS信号非常微弱,其功率不足用户接收机噪声功率的千分之一,较小的干扰就可能导致接收机不稳定或失效[1]。因此GPS抗干扰技术受到越来越多的关注。
近年来,基于天线阵的GPS抗干扰接收机得到广泛的应用和发展,国外对此项技术已进行了非常深入的研究,主要包括自适应抗干扰模块、天线阵信号源以及实际场地测试三个方面[2-3];国内的研究和应用仍处于起步阶段。目前实际硬件实现的抗干扰接收机大多基于最小功率算法,该算法实现简单,但不能提供多天线系统带来的信号处理增益。本文在文献[4]所提出的解重扩算法的基础上给出一种多波束GPS抗干扰实时接收机的硬件实现方案,此方案充分利用解重扩算法和GPS接收机的特点,将两者紧密结合,并根据硬件平台的性能,实现了资源的合理配置。本文还对所提方案做了仿真分析,并用实测数据进行了验证。
1 解重扩算法原理
1.1 信号模型
考虑一个由M个阵元组成的GPS接收机天线阵列,当干扰入射到天线阵列上时,接收到的下变频后的数字中频信号为

1.2 解重扩算法
解重扩算法最早用于CDMA系统的抗干扰中[5],文献[4]将其用于GPS抗干扰中并结合GPS信号的特点将该算法简化,不需解调导航数据,只需根据相关结果所估计的每颗卫星的C/A码及含多普勒频率的中频信息重构信号。其原理框图如图1所示。
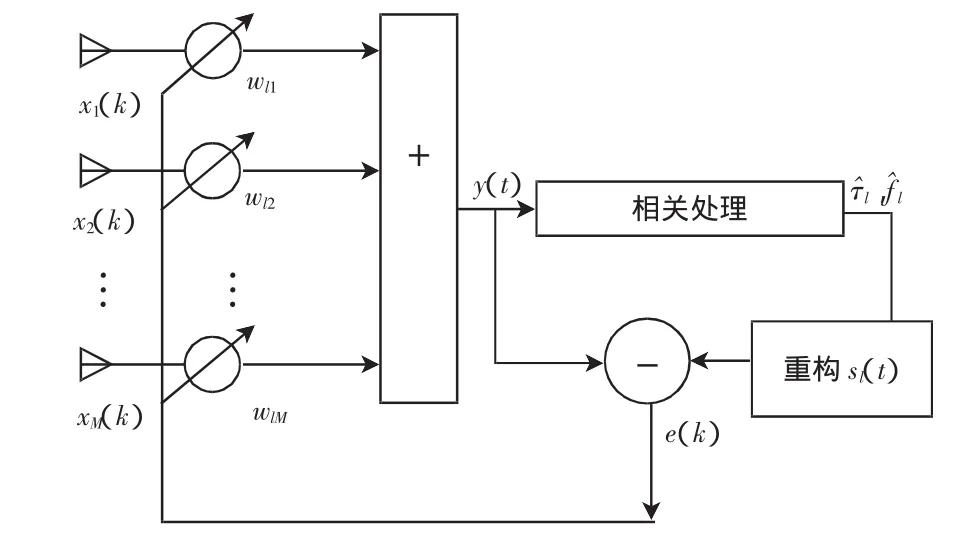
图1 解重扩算法原理框图Fig.1 Block diagram of despread respread algorithm
在图1中,利用已知的C/A码对天线阵列输出信号进行相关处理,根据估计到的卫星信号的到达时间和多普勒频率信息重建卫星信号,并以此信号为参考信号来更新天线阵列的加权矢量。设第l颗GPS卫星的加权矢量为wl,其更新公式[4]为

其中:h表示权矢量计算的迭代次数,为提高算法的收敛性能,用最小功率算法的权矢量作为初始权矢量[4],即wl(1)=wPI。X为采样数据矩阵;*表示共轭;rl(h)是期望信号,即


与最小功率算法相比,解重扩算法有较大优势。最小功率算法无需知道卫星信号来向会在干扰来向上形成零陷,却不能在卫星信号来向上形成增益,也不能实现多波束抗干扰;解重扩算法同样不需知道卫星来向或阵列流形信息,但能产生多个高增益的波束,且多波束形成能力不受阵元数的限制[4]。
2 实现方案
根据解重扩算法的原理可知,解重扩算法中相关处理的方法和普通GPS接收机的捕获算法原理一致。因此可将该算法和接收机紧密结合,设计具有紧耦合特性的多波束GPS抗干扰接收机。该抗干扰接收机设计方案如图2所示。
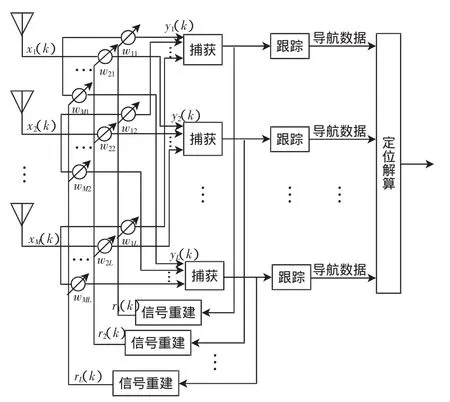
图2 系统方案框图Fig.2 Block diagram of system scheme
从图2可看出系统的整体流程是,首先按照式(4)根据上节所述计算解重扩算法的权矢量w,包括捕获、信号重建等步骤;然后对输入数据做加权处理;最后对处理后的数据捕获、跟踪并解算出定位结果。
系统实现采用块自适应处理方法[6],每一块数据分别做自适应干扰抑制处理,再将处理后的数据依次拼接。每块数据经不同的权矢量处理后,拼接时会出现相位或幅度不统一的问题,故用权矢量归一化[6]方法使其统一;本方案中块与块之间的权矢量更新时,第一块数据中算法的初始权矢量为最小功率权矢量,非第一块数据中初始权矢量取为上一块的解重扩权矢量,此方法可以提高算法和系统的性能。经多次实验得出,解重扩权矢量经一次迭代性能就比较稳定,因而权矢量计算的迭代次数取为1。另外,算法权矢量求解中含有矩阵求逆运算,直接求逆在硬件实现中难度较大且资源占用率较高,方案中选用CholeSky分解方法[6]取代求逆运算。兼顾导航数据翻转的影响和数据累加可提高信号信噪比这两个方面,捕获所用数据长度取为10 ms;综合考虑运算速度、硬件资源和运算的准确度,选取10 ms数据用于计算解重扩算法的权矢量。跟踪模块采用码跟踪环和延迟锁定环来实现;取跟踪通道数为8,则最多有8颗卫星用于定位[7]。
系统的实现采用成都傅立叶电子科技有限公司生产的软件无线电处理平台,型号为FFT-SDR-V4。FFT-SDR-V4采用cPCI接口,特别适合对外界工作条件苛刻的应用场合,板载总容量上千万门的FPGA(现场可编程门阵列),轻松应对高速的数据并行处理,所采用的DSP(数字信号处理器)为TI的TMS320C6416系列,处理器频率从600 MHz到1 GHz,同时板上提供了大容量的存贮器方便开发。FFT-SDR-V4由TI公司的TMS320C6416T的DSP作为主处理器;Xilinx公司的Virtex4-XC4VLX60的FPGA作为协处理器,分别为FPGA-A和FPGA-B。
定位算法所需的参数较多,对参数的位长要求较高,并且定位算法运算量较小,适于在DSP中实现;FPGA中执行的运算算法结构较简单[8],可用来实现Hilbert变换、捕获、自相关阵和互相关阵的计算、权矢量处理数据等模块。基于所述平台,系统的具体实现方案如图3所示。
由图3可以看出系统的实现步骤为:
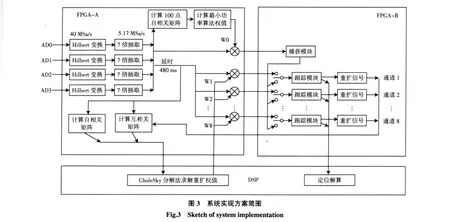
第一步:Hilbert变换和7倍分频。输入数据为实数,进行Hilbert变换后使其由实变为复;输入数据采样频率为5.714 MHz,而系统时钟为40 MHz,需进行7倍分频。处理后的数据一路做最小功率算法;另一路延时480 ms后做解重扩算法。
第二步:最小功率算法处理数据。解重扩算法的初始权矢量为最小功率权矢量,本步骤则是计算最小功率权矢量,然后按照块自适应方法处理长度约为10 ms的数据,块大小为100点。
第三步:捕获、跟踪、重建信号。捕获即搜索每颗有效卫星的码相位和载波频率,为跟踪提供初值;跟踪是追踪得到较准确的码相位和载频,然后对数据解调解扩得到导航数据。导航数据送入定位模块;码相位和载频送入信号重建模块。信号重建模块是根据式(3)重新生成每颗有效卫星的信号,即参考信号。
第四步:解重扩算法权矢量计算。分别计算输入数据的自相关阵和输入数据与参考信号的互相关阵,然后通过CholeSky分解计算得出每颗有效卫星对应的解重扩权矢量。
第五步:数据加权、跟踪和定位。用解重扩权矢量对输入数据进行处理,处理之后的信号是相对准确的卫星信号,然后用它们进行跟踪和定位解算,得出定位结果。
硬件实现时捕获模块中快速傅里叶变换及其逆变换采用同一个快速傅里叶变换核来实现,根据所用平台估计出捕获所需时间约为475 ms;实际系统中数据流是连续的,为保证捕获、跟踪和自互相关阵计算三者输入数据的一致性,需要对后两者的输入数据产生475 ms以上的延迟,算法权矢量也须随数据的变化而更新。在此把延迟时长和权矢量更新间隔都取为500 ms,那么可把500 ms看作为一个小块;块数大于72即数据长度大于36 s时,可解算出定位结果[9]。
3 软件仿真
本节介绍第二节所述系统实现方案的仿真。仿真流程如图4所示。

图4 软件仿真流程图Fig.4 Flow chart of software simulation
图4是图3所示方案的软件仿真流程,为模仿实际硬件系统的实时性,需考虑卫星位置变化而引起的跟踪失锁和有效卫星的更新问题,具体分析如下。
若某颗卫星的跟踪失锁,可判定此卫星已不在接收机的观测范围内,清空通道,以为新出现的卫星所用;新卫星的检测通过捕获完成,当捕获到新的卫星时,查找各通道状态,若有闲置通道,则将该星放入闲置通道,这样就实现了卫星的更新。另外,卫星更新可能会引起某个通道的跟踪信息不连续,所以定位解算前需对每个通道的跟踪结果作出判断,从定位时刻往前的36 s内,若该通道均有连续的跟踪结果,此通道可用,反之不可用。
硬件实现中大部分变量或参数是固定位长的,因此对软件仿真进行了定点化。定点化过程是在保证抗干扰算法处理之后估计出的卫星信号的载噪比和最终的定位精度损失较小的前提下,尽可能地减少位长,以节省硬件资源。
4 实测数据验证
本节给出了所提方案的实测数据的仿真结果,仿真工具为Maltlab。接收机所在位置的经纬度分别为39°06′44.95″和 117°20′40.39″,天线阵列是 2×2 的平面阵,阵元数为4。信号采样频率为5.714 MHz,模拟中频是4.309 MHz,所采数据长度为37 s;所加干扰为调频干扰。
图5给出了分别采用最小功率算法和解重扩算法进行抗干扰后的捕获结果的比较,从图5可以看出,采用解重扩算法进行抗干扰后得到的捕获峰值明显优于最小功率算法的捕获峰值。
图6是经两种算法处理之后跟踪得出的卫星15#的解调结果。横轴表示同相支路的即时码(IP),它的极性为导航数据信息;纵轴表示正交支路的即时码(QP),为噪声信息。图6(b)是解重扩算法处理后的跟踪结果,IP正负极性分开,解调正常。图6(a)是最小功率算法处理后的跟踪结果,没有完全解调开,无法得到正确的导航数据信息,故无法解算出定位结果。
表1估计了分别经最小功率算法和解重扩算法处理之后每颗卫星信号的载噪比。可以看出,与最小功率算法相比,解重扩算法对5颗卫星信号的载噪比有3~4 dB的增益,更全面地说明了解重扩算法对信号有高增益的优点。


表1 载噪比对比Tab.1 Contrast of carrier-to-noise ratio
图7为经解重扩算法处理后的定位结果,而经最小功率算法处理后的数据无法得出定位结果。图7(b)为解算出的卫星的位置,图7(a)是解算出的接收机位置。从图7中可看出用于定位的有效卫星分别为2#、5#、10#、15#、29#,以精确位置为基准计算出图 7 中解算出的接收机位置的定位精度为3.46 m。

5 结语
本文提出了一种GPS数字多波束抗干扰实时接收机的硬件实现方案,对所提方案进行了软件仿真,并对仿真进行了定点化。通过实测数据验证表明,所提方案是有效的,该系统可有效抑制干扰,且对GPS信号有较大增益。
[1] JAY R S.Interference mitigation approaches for the global positioning system[J].Lincoln Laboratory Journal,2003,14(2):168-180.
[2] 张文明.卫星导航干扰系统干扰抑制系统[D].长沙:国防科技大学研究生院,2002.
[3] 庄学彬,崔晓伟.基于天线阵的GPS抗干扰模块涉及与实现[C]//第一届中国卫星导航学术年会论文集(上).北京:中国卫星导航学术年会组委会,2010:208-215.
[4] 卢 丹,吴仁彪,石庆研,等.一种基于码字结构的盲自适应GPS干扰抑制方法:中国,200910069091.3[P].
[5]HONIG R A,MADHOW U,VERDU S.Blind adaptive multiuser detection[J].IEEE Trans Inform Therory,1995,41:944-960.
[6] 吴仁彪,孙擎宇,胡铁乔,等.基于功率倒置算法的GPS抗干扰实时系统实现[J].中国民航大学学报,2010,28(3):45-48.
[7] 吴录喜,谢世杰.新型GPS接收机为何选用8通道[J].测绘通报,1996(6):31-32.
[8] 薛小刚,葛毅敏.Xilinx ISE 9.X FPGA/CPLD设计指南[M].北京:人民邮电出版社,2007.
[9]JAMES BAO-YEN TSUI.GPS软件接收机基础[M].2版.北京:电子工业出版社,2007.
GPS Anti-Jamming Real-Time Receiver Based on Despread Respread Algorithm
WU Ren-biao, LI Xiao, HU Tie-qiao, LU Dan
(Tianjin Key Lab for Advanced Signal Processing, CAUC, Tianjin 300300, China)
Based on the despread respread algorithm, a realization scheme of GPS anti-jamming real-time receiver system is proposed.This scheme makes full use of the characters of the despread respread algorithm and GPS receiver, so the structure of the system is close coupled.In addition, the resources are allocated reasonably according to the different features of FPGA and DSP.Experimental results prove that the system is a multibeam anti-jamming receiver,which can not only suppress the jamming signals but also get extra gains of the satellite signals.
GPS;anti-jamming receiver;despread respread algorithm; multi-beam
TN911.7
A
1674-5590(2011)02-0027-05
2010-10-18;
2011-01-18
国家863高技术计划项目(2006AA12Z321);中国民航大学科研基金项目(07QD03X)
吴仁彪(1966—),男,湖北武汉人,教授,博士,研究方向为信号处理.
(责任编辑:杨媛媛)
