换刀机器人手爪的设计与仿真
2011-05-11顾寄南师二产胡典传
顾寄南,师二产,胡典传
(江苏大学 制造业信息化研究中心,镇江 212013)
换刀机器人手爪的设计与仿真
顾寄南,师二产,胡典传
(江苏大学 制造业信息化研究中心,镇江 212013)
0 引言
随着工业生产逐步向自动化、智能化方向不断发展,工业机器人在制造业领域的需求也在不断增加。广泛采用工业机器人,不仅可提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。机器人手爪作为机器人关键零部件之一,它是机器人与环境相互作用的最后环节和执行部件,其性能的优劣在很大程度上决定了整个机器人的工作性能。因此,对机器人手爪的设计与研究具有很重要的意义。
本文设计了一种用于数控机床换刀的机器人手爪,采用结构简单、动作灵活、手指张开角度大的滑槽导杆机构,并且采用价格低廉、结构简单、功率体积比高、无污染及抗干扰性强的气动控制方式,同时对整个机构进行了三维设计与仿真分析。
1 手爪设计
1.1 结构设计
如图1左边所示为要抓取的对象,被抓取刀柄和刀具总重量为8kg,刀柄规格为日本标准BIGBT40刀柄样本。根据要求,所设计的机器人手爪应当抓取稳定可靠,并且结构简单、尺寸较小、重量较轻。此外,手爪作为机器人的末端构件,其重量、尺寸等对整个机器人的性能都有很大的影响。为了满足设计的要求,设计的手爪爪齿齿面与刀柄的锥形槽接触,实现对刀柄及刀具的抓取。为此,将手爪齿面设计成与刀柄锥形匹配的锥面。刀柄最大锥面直径为 63mm,最小直径为 53mm,为了能够便于夹紧,手爪爪齿锥面的最小直径应大于 53mm,这里取为 54mm,手爪爪齿如图1右边所示。
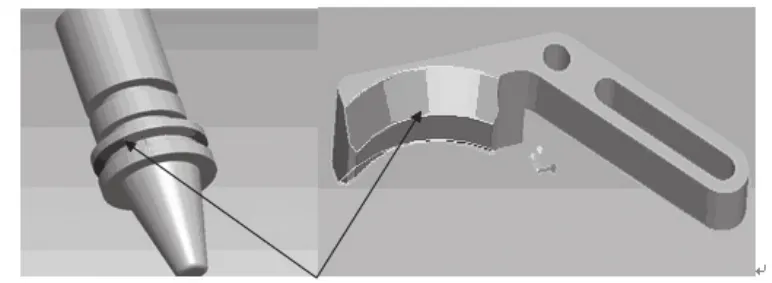
图1 手爪与刀柄的接触图
根据设计要求,为了保证所设计的手爪结构简单、尺寸较小,采用结构紧凑的滑槽导杆机构。滑槽导杆机构,具有结构简单、动作灵活、手指张开角度大等特点。同时,为了实现手爪对抓取对象的稳定抓取,提高其可靠性,在抓取刀柄时,手爪爪齿的锥形面与刀柄的锥形面匹配接触,如图1所示。
换刀机器人手爪的结构如图2所示,驱动气缸活塞杆末端通过销轴与爪齿末端的滑槽连接,驱动爪齿绕着支架上的转轴转动,组成一滑槽导杆机构,把气缸的直线运动转化成爪齿绕转轴的转动,实现手爪对被抓取对象的抓取。同时,手爪上的锥面通过与刀柄中间锥(V)形槽结构相匹配从而实现对刀具的抓取。锥(V)形槽结构对机器人手爪的抓刀有引导的作用,并在抓刀过程中起到自动定位的作用,因而提高了整个抓刀动作的可靠性与稳定性。
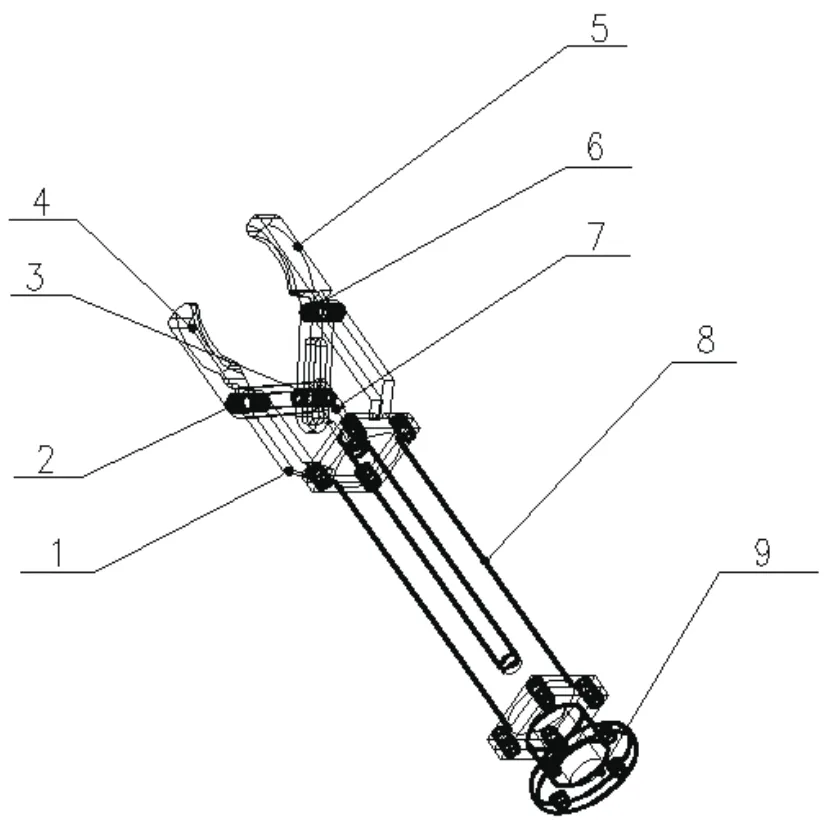
1.支架 2.圆柱销 3.销轴 4.爪齿一 5.爪齿二 6.圆柱销7.活塞杆 8.气缸 9.连接法兰
1.2 夹紧力的计算
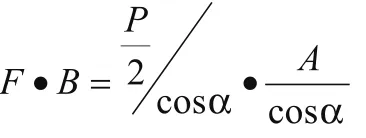
手爪驱动气缸选用QGX系列小型气缸,缸径 20mm,活塞杆直径 8mm,其工作压力 为0.15~0.8 ,建立如图3所示的手爪力学模型。

图3 手爪的力学模型
2 仿真分析
文中采用美国MDI公司(Mechanical Dynamics inc.)开发的ADAMS(Automatic Dynamic Analysis of Mechanical System)软件对手爪进行仿真分析。由于ADAMS软件本身的造型能力比较弱,因此,首先在Pro/E中建立好三维模型,然后导入ADAMS中。本文采用中间通用数据接口来实现两者之间的数据传输,首先将在Pro/E中建立好三维模型保存成 Parasolid(*.x_t)格式,然后导入ADAMS中,对其进行属性编辑,施加约束及驱动,进行仿真。
在ADAMS中设置仿真时间End time为4S,仿真步数Steps为100,启动仿真过程。并测量手爪爪齿的转动角度,如图4所示。
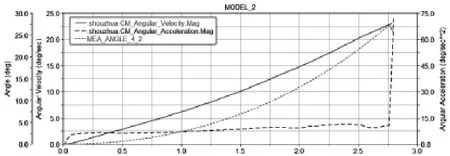
图4 爪齿转角、角速度与角加速度
从图4中可以看出,采用滑槽导杆机构,手爪爪齿的转动角度比较大,使得整个机构的尺寸较小,能够满足设计的要求。
3 结论
本文根据被抓取对象的表面特征设计了一种能够稳定抓取工作对象,可靠性高的专用手爪,能够满足设计要求,并且具有以下特点:
1)采用了滑槽导杆机构,使得整个手爪结构简单、动作灵活、手指张开角度大,缩小了手爪尺寸,减轻了重量。
2)采用了价格低廉、结构简单、无污染及抗干扰性强的气动控制方式,该方式具有响应速度快,动作迅速、维护简单等优点。
[1]骆敏舟,杨秀清,梅涛.机器人手爪的研究现状与进展[J].机器人技术与应用,2008(2).
[2]盛小明,钟康民.带增力机构的工业机器人手臂末端夹持器[J].机械制造,2006,44(9).
[3]郑建荣.虚拟样机技术入门与提高[M].北京:机械工业出版社,2001.
[4]丁寿滨,常宗瑜,武雅洁,谭登山,朱春涛.ADAMS与常用CAD软件之间的接口[J].微计算机信息.2005,21(30).
[5]郭卫东.虚拟样机技术及ADAMS应用实例教程[M].北京:北京航空航天大学出版社,2008.
Design and simulation of robot hand for automatic tool changer
GU Ji-nan, SHI Er-chan, HU Dian-chuan
机器人手爪作为机器人关键零部件之一,它是机器人与环境相互作用的最后环节和执行部件,其性能的优劣在很大程度上决定了整个机器人的工作性能。因此,对机器人手爪的设计与研究具有很重要的意义。本文根据被抓取的对象设计了一种结构简单、动作灵活、抓取稳定、可靠性好的专用手爪,采用滑槽导杆机构及气动控制方式,并对整个机构进行了仿真。
机器人手爪;设计;仿真
顾寄南(1964 -),男,教授,博士生导师,研究方向为虚拟机械设计与虚拟装配、基于网络的设计与制造、制造业信息化。
TP242
A
1009-0134(2011)4(上)-0109-02
10.3969/j.issn.1009-0134.2011.4(上).34
2010-10-28
