组合式大尺寸三维测量系统中的结构参数标定算法
2011-05-10李中伟史玉升王从军张李超
钟 凯,李中伟,史玉升,王从军,张李超,黄 奎
(华中科技大学材料成形与模具技术国家重点实验室,武汉 430074)
在现有的三维测量技术中,结构光三维测量系统(structure light system,SLS)因其速度快,分辨率高,非接触等优点被广泛使用[1-2].然而,在大型物体的三维形貌测量中,首先需要对局部表面进行扫描,然后将多次扫描的局部三维数据转换到同一个全局坐标系统下,从而实现大型三维测量.在测量过程中,实现点云自动拼合最常用的方法是通过标志点来计算坐标转换矩阵.这种方法成本低,而且使用广泛.但是,人工粘贴标志点非常耗时,特别是测量大型零件.
目前,较成熟的大尺寸测量仪器主要有大型三坐标测量机[3]、经纬仪、激光跟踪仪[4]、摄影测量系统[5]和室内全球定位系统(global positioning system,GPS)[6].它们的测量精度普遍较高.其中,室内GPS与其他大尺寸跟踪技术相比,最大优点是测量误差不随测量范围的增大而增大[7].在100,m的测量空间里,室内GPS的精度最高.但上述系统只能进行单点测量,空间分辨率较低,无法描述被测物体的形貌特征.
为此,笔者采用多台 SLS测量终端对大型工件进行局部测量,同时由室内 GPS追踪多台 SLS终端在测量空间中(全局坐标系下)的三维位姿信息.这样,各台 SLS终端测得的局部三维数据便可自动拼合到全局坐标系下,从而实现高效的大尺寸测量.此方法即保持了结构光测量技术在局部范围内高效、高精度的测量优势,又充分发挥了大范围的实时高精度跟踪定位功能.与现有的大尺寸测量技术相比,本文所提的组合式大尺寸空间测量技术具有以下 3个优点:①克服了目前众多大尺寸空间定位技术只能进行单点测量、测量速度慢、测量效率低等缺 点[8];②能够对大型、超大型工件的局部细节特征进行高精度测量,可克服此类工件整体尺寸大与细节分辨率高之间的矛盾;③无需粘贴标志点,且可支持多台测量终端并行测量,测量效率高,同时由于室内 GPS在大范围内的高精度定位可显著减少数据拼合时产生的积累误差.
笔者首先介绍组合式大尺寸三维测量系统的点云自动拼合原理,同时指出实现数据拼合的关键在于标定系统结构参数,并且提出了一种结构参数标定方法.最后,采用等效模拟实验验证了点云自动拼合的可行性并进行分析.
1 自动拼合的原理
组合式大尺寸三维测量系统如图1所示,主要是由室内GPS与若干SLS终端组成.其中,室内GPS定位系统包括红外发射器、传感器和接收器.测量时,至少4台红外发射器均布于测量空间上方,接收器接收来自传感器的信号并将数据传送给计算机,计算出传感器在室内GPS坐标系下的坐标值[9-10].此处,定义室内 GPS的坐标系 Owxwywzw为全局坐标系,而各台结构光测量终端的坐标系 Os1xs1ys1zs1、Os2xs2ys2zs2和Os3xs3ys3zs3为局部坐标系.如果,测量时能将各局部坐标系下的三维数据实时的转换到全局坐标系下,便能实现实时、高效的数据拼合.因此,实时的计算出当前局部坐标系与全局坐标系的转换关系,即旋转矩阵与平移矩阵,是多片数据拼合的关键环节.

图1 组合式大尺寸测量系统Fig.1 Combined large-scale metrology system
系统中,传感器固定在 SLS终端上.这样,传感器在室内 GPS坐标系下的坐标可以在测量过程中实时追踪,并且该传感器在 SLS测量终端坐标系下的坐标值始终保持不变.因此,只需预先标定出传感器在 SLS测量终端坐标系下的坐标值,便可计算出当前局部坐标系与全局坐标系间转换关系.文中将每个SLS测量终端上固定至少3个传感器,利用至少3个传感器便可描述 SLS测量终端在全局坐标系下的三维位姿信息,因为至少需要3个点的坐标来求解坐标系间的转换关系.因此,只需在测量前标定出传感器在当前 SLS终端坐标系下的坐标值,便可计算出当前局部坐标系与全局坐标系间的旋转、平移矩阵,然后可将 SLS终端在当前位姿下测得的三维数据实自动地拼合到同一全局坐标系下,拼合公式为

式中:Ps是第i台 SLS测量终端在第j个位姿时在
ij当前局部坐标系下的三维数据; Rij和 Tij是第i台SLS测量终端在第j个位姿时的局部坐标系与全局坐标系间的旋转、平移矩阵,Pijw则是经变换后得到的全局坐标系下的三维数据.
2 标定系统结构参数的方法
标定出传感器在当前SLS测量终端坐标系下的坐标值是实现多片局部数据自动拼合的关键技术之一.然而,组合式大型物体测量系统中的SLS终端无法直接测量各自上方安装的传感器在其坐标系下的坐标值.为此,设计了一种有效且便捷的标定方法.
该方法如图2所示,标定的标靶是由多个陶瓷球体经细杆连接的标靶,球体的数量不得少于 3个.此处,采用Kang[11]的基于室内GPS技术的接触式测量光笔对每个小球的表面进行多次测量,通过这些坐标值可以拟合出每个小球球心在室内 GPS坐标系下的坐标值gP.同时,可以通过 SLS终端测量出小球的表面三维数据拟合出球心在 SLS终端坐标系下的坐标值sP.则可计算出室内GPS坐标系到当前SLS测量终端坐标系的旋转矩阵 R0和平移矩阵 T0,本文采用精度较高且稳定的奇异值(SVD)分解法[12],首先根据最小二乘方误差准则建立目标函数

对H进行奇异值分解得

则旋转矩阵 R0和平移矩阵T0为

同时,室内GPS可以测量出SLS测量终端上的传感器在室内 GPS坐标系下的坐标值,这样便可计算出传感器在 SLS测量终端坐标系下的坐标值,其计算公式为

式中 Pcg和Pcs均为传感器在室内 GPS坐标系和结构光测量终端坐标系下的坐标值.这样便标定出了传感器在 SLS测量终端坐标系下的坐标值.该方法简单实用,并且标定完成后只要保持传感器与 SLS测量终端的相对位置不变,该系统便可持续使用,提高了组合式大尺寸三维测量系统的柔性.

图2 系统参数标定示意Fig.2 Sketch map of system structure parameters calibra-Fig.3 tion
3 实验与分析
根据上述原理,分别进行了系统结构参数标定实验与点云自动拼合实验.实验中利用 2个 CCD(charge coupled device)相机(HITACIH KP-F3,支持的最高分辨率为644×493)组成的双目立体视觉系统来模拟室内GPS,因为本文重点在于验证系统结构参数标定方法,并且两者都是通过空间交汇原理来确定被测点的坐标值,故可进行等效模拟,在后续工作中将使用室内GPS进一步对本文算法进行验证.然后,在SLS上贴上4个标志点来代替安置在SLS上的4个传感器,来描述 SLS终端在测量空间中的位姿信息.其中,SLS终端是由一个 CCD相机(大恒SV1410FM,支持的最高分辨率为 1,392×1,040)和投影仪(Optoma PV3225,支持的最高分辨率为1,280×1,024)组成的单目结构光测量系统[13].
3.1 系统结构参数标定实验
采用Bouguet的Matlab标定工具箱[14]分别标定出双目立体视觉系统和SLS系统中相机与投影仪的内外部参数,将投影仪当作相机对待[15],同时也建立了双目立体视觉坐标系和SLS终端坐标系.
如图 3所示,标定时使用带有 8×10个圆形标志点的平面标定板代替陶瓷小球完成的标定过程.具体步骤如下:
(1)双目立体视觉系统对粘贴在SLS终端上的4个标志点和平面标定板上的 80个圆进行拍摄,提取图像的圆心坐标,根据预先标定的相机内外部参数计算出这些点在双目立体视觉坐标系下的三维坐标值;
(2)SLS终端对平面标定板上的 80个圆进行拍摄,提取相机与投影仪图像的圆心坐标[15],根据预先标定的相机与投影仪的内外部参数计算出平板标志点在SLS终端坐标系下的三维坐标值;
(3)利用平板标志点在2个坐标系下的坐标值计算出从双目立体视觉系统坐标系到 SLS终端坐标系的旋转矩阵0R与平移矩阵0T,继而计算出粘贴在SLS终端上的4个标志点在SLS终端坐标系下的三维坐标值csP,标定结果见如表1所示.

表1 结构参数标定结果Tab.1 Calibration results of structure parameters mm
3.2 点云数据自动拼合实验
SLS终端分别从3个不同的视点对塑料人脸模型进行拍摄,同时双目立体视觉系统对粘贴在 SLS终端上的3个标志点进行追踪,根据上述标定的4个标志点在SLS终端下的三维坐标,计算每个视点下 SLS终端坐标系到双目视觉坐标系的旋转、平移矩阵,从而将各视点下SLS终端测得的三维数据变换到双目立体视觉系统的坐标系下,完成数据自动拼合.
数据拼合结果如图 4所示,图 4(b)中是 SLS终端分别在3视点下测得的三维数据,该数据还未变换到双目立体视觉系统的坐标系下;图 4(c)中是变换后的三维数据.图 4(b)和图 4(c)中的数据未做任何滤波、去噪等处理.
3.3 结果与分析
用现有的条件模拟标定出组合式大尺寸三维测量系统的结构参数,并且成功地验证了点云自动拼合算法的正确性.从实验结果来看,3片数据能重合在一起,但仍存在较大的误差.经分析,系统的误差来源主要有:①SLS终端的测量误差;②数据拼合误差.标定结构参数时,标定板和 4个标志点在双目立体视觉系统中的深度方向上相差较大,因此计算三维点坐标时会产生较大的误差,从而影响了旋转、平移矩阵的计算;③用至少 3个标志点来描述 SLS终端是最基本的要求,因此标志点的数量与分布还需进一步优化.
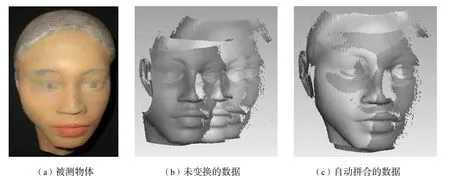
图4 数据拼合结果Fig.4 Data registration results
4 结 语
针对大型物体三维形貌测量效率低的问题,提出了一种将室内 GPS与结构光测量系统相结合的方法作为大型物体三维测量的解决方案,该系统中利用室内 GPS追踪结构光测量终端在测量空间中的三维位姿信息,从而将各终端测量的局部三维数据自动的拼合到同一全局坐标系下.同时,也解决了自动拼合中系统结构参数的标定算法,通过实验模拟了该过程.实验表明,点云数据能自动拼合,从而验证了组合式大型物体三维测量系统点云自动拼合方法的可行性,在后续的工作中将用室内GPS系统进行验证.
[1]Reich C,Ritter R,Thesing J. 3D shape measurement of complex objects by combining photogrammetry and fringe projection[J].Optical Engineering,2000,39(1):224-231.
[3]黄桂平,钦桂勤. 大尺寸三坐标测量方法与监测与系统[J]. 宇航计测技术,2007,27(4):15-19.
Huang Guiping,Qin Guiqin. Measurement methods of the large scale 3D coordinate and its system[J].Journals of Astronautic Metrology and Measurement,2007,27(4):15-19(in Chinese).
[4]王卫军,李晓星,方 程,等. 激光跟踪仪在风机叶片外形测量中的应用[J]. 航天制造技术,2009(6):26-29.
Wang Weijun,Li Xiaoxing,Fang Cheng,et al. Wind rotor blade measurement with laser tracker[J].Aerospace Manufacturing Technology,2009(6):26-29(in Chinese).
[5]吴庆阳,苏显渝,向立群,等. 线结构光双传感器测量系统的标定方法[J]. 中国激光,2007,34(2):259-264.
Wu Qingyang,Su Xianyu,Xiang Liqun,et al. A new calibration method for two-sensor measurement system based on line-structure light[J].Chinese Journal of Lasers,2007,34(2):259-264(in Chinese).
[6]Nikon Metrology NV[OE/BL]. http://www. indoorgps.com,2010.
[7]吴晓峰,张国雄. 室内 GPS测量系统及其在飞机装配中的应用[J]. 航空精密制造技术,2006,42(5):1-5.
Wu Xiaofeng,Zhang Guoxiong. Indoor GPS and its application in aircraft assembly[J].Aviation Precision Manufacturing Technology,2006,42(5):1-5(in Chinese).
[8]张福民,曲兴华,戴建芳,等. 现场大尺寸测量量值溯源[J]. 天津大学学报,2008,41(10):1167-1171.
Zhang Fumin,Qu Xinghua,Dai Jianfang,et al. Quantity traceability in large-scale measurement in situ[J]. Journal of Tianjin University,2008,41(10):1167-1171(in Chinese).
[9]Maisano D. Indoor GPS:System functionality and initial performance evaluation[J].International Journal of Manufacturing Research,2008,3(3):335-349.
[10]Liu Zhongzheng,Liu Zhigang, Lu Bingheng. Error compensation of indoor GPS measurement[J].Intelligent Robotics and Applications, 2008,5315:612-619.
[11]Kang S,Tesar D. Indoor GPS metrology system with 3D probe for precision applications Proceedings[C]//Proceedings of ASME IMECE 2004 International Mechanical Engineering Congress and RD and D Expo.Anaheim,CA,2004:1-8.
[12]Eggert D W,Lorusso A,Fischer R B. Estimating 3D rigid body transformations:A comparison of four major algorithms[J].Machine Vision and Applications,1997,9(5/6):272-290.
[13]Li Zhongwei,Shi Yusheng,Wang Congjun,et al.Complex object 3D measurement based on phase-shifting and a neural network[J]. Optics Communications,2009,282(14):2699-2706.
[14]Bouguet Jean-Yves. Camera Calibration Toolbox for Matlab[OE/BL]. http://www.vision.caltech.edu/bouguetj/calib_doc/,2010-07-09.
[15]Li Zhongwei,Shi Yusheng,Wang Congjun,et al. Accurate calibration method for a structured light system[J].Optical Engineering,2008,47(5):053604.