基于视觉和有向九宫格的晶圆盘遍历算法及应用
2011-05-10尹周平
梁 若,熊 波,尹周平,李 敏
(华中科技大学 机械学院 数字制造装备与技术国家重点实验室,武汉 430074)
0 引言
RFID射频识别技术是物联网的核心技术。由于RFID射频识别技术与互联网、通讯等信息技术相结合,可以实现全球范围内物品跟踪与信息共享,未来市场需求巨大,对我国制造业的发展意义重大[1-3]。RFID封装设备,一般由基板输送、点胶、翻转贴片、热压和检测五个模块组成,其中翻转贴装模块是设备最主要部分。
在RFID倒装设备的翻转贴装流程中,如何正确有效的从晶圆盘上拾取芯片,直接影响到封装的效率和芯片的利用率,是设备关键流程。其主要动作流程如下:给定起始芯片,然后晶圆盘驱动单元进给,将晶圆上的每一个好芯片按一定顺序,自动的移动到翻转头拾取工作范围,最后由翻转头完成芯片的拾取,该过程在本文称为晶圆遍历。晶圆遍历主要解决以下问题[4]:
1)减少人为干预,自动拾取完整个晶圆盘芯片;
2)使拾取路径连续,尽量缩短每次移动的距离,避免芯片零散遗漏;
3)芯片对位时尽量走最合理的路径,当暂时找不到芯片的时候能够向有芯片的区域移动;
4)判断路径的时间应该尽量短,提高效率。
晶圆遍历算法从原理上一般可以分为两类:1)基于Map文件的遍历算法:通过读取保存在Map文件的信息来确定当前芯片的好坏状态,按照map文件的形式完成芯片拾取的路径规划;2)基于视觉的遍历算法:通过图像视觉的方法,判断当前芯片的状态和位置坐标,再按一定的路径规划进行移动翻取。一般基于MAP文件的遍历较为稳定,但MAP文件格式众多,且不能适用于含有空洞的wafer盘,其适应性较差。基于视觉的遍历,适应性好,但其依赖于视觉效果,效率和稳定性较差;文献 [6]使用视觉的遍历方式,采用逐行遍历的路径规划,文献[5]在此基础上,通过好芯片、坏芯片和边缘芯片三种状态进行区分换行,文献[4]则对十字直角路径和斜上优先两种路径规划进行了优化。
本文针对以前map遍历算法和视觉遍历算法的不足,根据设备的实际需求,在现有基础上提出了一种新的算法:基于视觉的有向九宫格遍历算法。该算法已成功应用在RFID倒装设备上,其适应性和稳定性更好,满足生产要求。
1 基于视觉的有向九宫格遍历算法
根据前面的分析,为了克服现有算法的不足,本文提出了一种新的基于有向九宫格的遍历算法。新算法以视觉遍历为基础,有效解决了map遍历适应性差的问题;同时参考map遍历直接跳过坏芯片,效率高的特点,采用九宫格视野扩大遍历范围,九颗芯片只需一次图像处理,并且只对好芯片处理,从而解决了现有的视觉遍历算法对每一个芯片的状态单独处理,效率低下的问题;九宫格内采用贪心算法搜索策略,实现九宫格内路径综合最优,保证效率;同时提出基于距离的换行标准,大大提高算法稳定性,对算法实际应用很大的促进作用。下面将对算法的原理进行详细的叙述。
1.1 有向九宫格遍历算法原理
有向九宫格采用方形的定位视野,视野中分为九个方格,如图1所示。新算法以九宫格为基本遍历单元,先把当前九宫格内所有好芯片拾取完成后,驱动机构自动进给到下一个九宫格继续遍历。每一个九宫格,只通过一次图像定位,就可对所有好芯片的状态定位,进行遍历;以贪心算法为搜索策略,使得九宫格内搜索总路径综合最短。算法主要有以下几个特点。

1.1.1 基于贪心算法的九宫格路径搜索策略
九宫格内拾取芯片时,必须要将好芯片移动到视野正中心方可拾取,因此,九宫格内部芯片拾取的路径规划的目的:以最短的搜索路径拾取完所有好芯片。这是一个典型的路径规划问题,如图3所示。拾取芯片时,通过对好芯片进行图像匹配处理,可以获取视野内好芯片的具体位置,但是由于九宫格内部芯片状态并不固定,每个位置的芯片都存在好芯片或是坏芯片状态的可能,不同芯片状态下遍历路径也不尽相同。
遍历的整体效率,是遍历路径的总长度和搜索算法时间复杂度两者的综合评价。实际工况中,芯片尺寸距离很小,较优解与最优解相差不大,效率影响较小;而贪心算法由局部最优代替全局最优,时间复杂度很低,可以快速获得最优解或较优解,既能满足路径优化,又能实现算法优化。综合考虑两者关系,本文采用贪心算法搜索策略。
针对九宫格路径规划问题,建立了图2的数学模型,以连通图表示表示整个路径规划的集合,好芯片以圆圈节点表示,距离以权值表示,视觉匹配处理计算完成后,即可获得九宫格对应的连通图。通过选择当前节点的最优解代替全局最优来实现九宫格内所有好芯片的拾取路径遍历,图3是贪心算法主要流程图。

1.1.2 基于距离的换行准则
基于视觉遍历的传统算法中,以芯片状态作为换行的准则,其换行依赖于芯片本身的状态和分布,运行并不稳定。针对这种情况本文提出了一种新的换行准则:根据九宫格当前窗口坐标和wafer圆心半径的关系,判定是否需要换行。该准则不依赖于晶圆盘上芯片的分布情况,对晶圆盘孔洞和缺角情况都能适应,稳定可靠。该准则的基本原理如下:
1)圆心和半径:学习晶圆盘边缘处四个点的坐标,通过四点拟合出wafer圆心和半径值;
2)换行和进给:每到一个新的九宫格位置,判断当前视野中心点与先前计算出的圆心之间的距离,并与半径作差,事先设置一个阈值,当差值大于该阈值时则进行换行动作,否则按照正常的算法流程进行;
3)晶圆盘遍历结束:当视野中心点与圆心的距离大于半径,并且在遍历的垂直方向上的距离也大于半径,则判断晶圆盘遍历结束。
本文采用最小二乘法,求解wafer盘圆心和半径,半径为R,圆心(A,B)的圆标准曲线为:

由上可知,三点即可以确定一个圆,所取点数越多,精度越高,由于芯片尺寸小,晶圆盘的半径远远大于芯片半径,故对精度要求不高,本文中通过采样四点坐标拟合一个圆。由四点坐标:(x1,y1), (x2,y2),(x3,y3),(x4,y4),代入方程即可求解得到a,b,c,从而得到wafer盘的圆心(A, B)和半径R。
1.1.3 有向九宫格遍历
遍历开始时,指定一个初始遍历方向,如从左到右遍历,加工结束后,自动保存当前的遍历方向和结束位置,下次开启后可直接遍历,其操作简单,且大大提高了遍历的连续性和适应性;使用九宫格,扩大视野范围,一次性对九个芯片处理,减少匹配次数,对好坏芯片的状态,都是一次处理,提高了效率。
1.2 算法的实现
根据前面的介绍,该算法的主要步骤如下:
1)选取起始遍历芯片:根据实际情况,选择开始遍历的起始点;
2)指定遍历方向:根据起始点状态和晶圆盘整体情况,确定遍历方向;
3)圆心半径确定:确定wafer盘4个边缘点坐标,由最小二乘法拟合出wafer盘的半径和圆心;
4)开始遍历:通过视觉图像定位,得到当前九宫格内好芯片坐标,由贪心算法遍历拾取完九宫格内所有好芯片;
5)每到一个新的九宫格位置时,先判断是否已达到换行标准;如果达到则换行并反向遍历,否则重复步骤4;
6)判断是否已遍历完整个晶圆盘,如果是则进行换料操作,否则按照算法流程,重复步骤4进行。
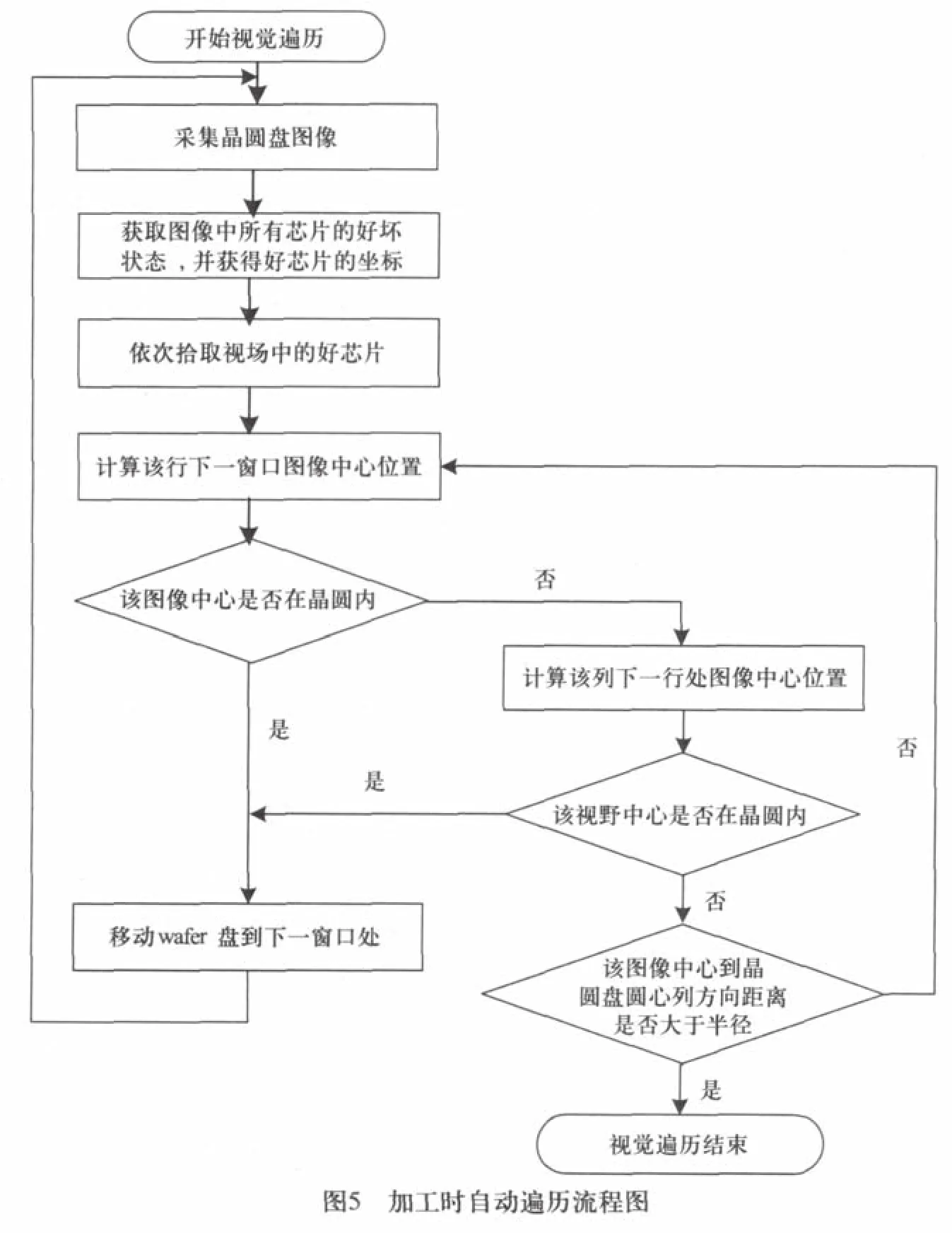
算法的流程图具体如下:遍历前的学习准备流程,如图4所示;加工时的流程,如图5所示。其中遍历前的学习流程,为离线操作,并不影响设备的运行效率,一般更换基材后只需要学习一次;加工流程,为自动加工时的在线操作,直接影响设备生产效率。

2 实验结果
该算法在实际RFID设备中进行实验,实验中,将设备顶针顶起的高度,由正常工作高度改为0,既可以完全模拟实际工况又不浪费芯片,同时为了保证采图的质量和翻转的效果,在实际过程中,加入了一定延时模拟。
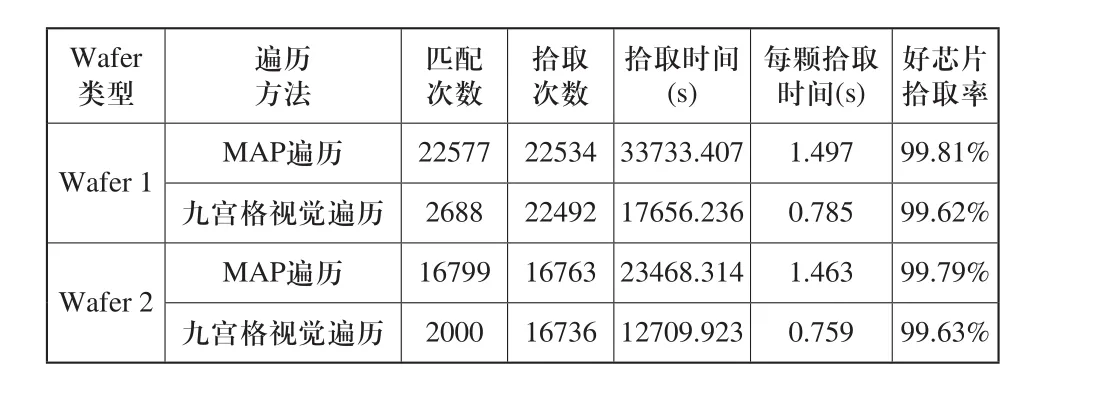
图6(a)为RFID设备中测试时所用到的wafer盘倒装翻转拾取机构。测试中使用了完整晶圆盘和部分已经加工过的晶圆盘两种。wafer盘1为完整晶圆盘,芯片总数23936,好芯片总数22577,合格率为94.322%;wafer盘2是部分加工过的晶圆盘,前60行已经被拾取,剩余wafer盘芯片总数17707,好芯片总数16799,合格率为94.87%。在原理上,不管是在效率、稳定性、性能上,九宫格遍历肯定要远远好于视觉逐行遍历算法,因此实验中,主要与MAP遍历做了比较,表1是实验的部分结果。
上述测试效果表明,九宫格视觉遍历拾取率与MAP遍历相比基本无变化,但是其效率却远远高于MAP遍历。同时,通过视觉观察到实验中未拾取的芯片,有部分的外观确实存在破损或者变脏,这可能是晶圆盘在转移的过程中导致了芯片的损坏,这也是为什么MAP遍历拾取率没有100%的原因,所以实际拾取率会比实验结果略高。实验中都是一次性遍历完成,中间并无停顿,稳定性很好。
另外,本次实验还使用了另外两种有空缺的wafer盘:图6(a)为单方向含孔洞晶圆盘;图6(b)为垂直方向含双孔洞晶圆盘。实验结果表明,对以上两种晶圆盘,九宫格遍历,并无影响,遍历时间、稳定性和拾取率和上面基本无差别。但对于MAP遍历而言,单方向含有孔洞晶圆盘,遍历过程中,需要停顿一次进行重新学习调整(停顿次数一般为孔洞个数);对于图6(b)晶圆盘,则直接失效,不能遍历。另外,由于MAP遍历中,MAP文件格式太多,有时候会出现格式不兼容情况,而视觉遍历都能适用。
实验表明,不管是对何种晶圆盘,该算法能在效率、稳定性和拾取率上能达到综合较优,智能性和适应性上都有了一定的提高,目前该算法已成功应用到实际RFID设备中。

实际测试中,该算法也存在一定的不足:1)由于其是基于视觉定位的,芯片状态的确定依赖于视觉系统处理效果;2)对空缺的晶圆盘,不需要停机保证了连续性,但是仍然会遍历晶圆盘空缺的地方,效率有所降低。对于这些不足,特别是视觉图像的处理效果,是后面需要进一步完善的地方。
3 结论
本文的最大贡献之处在于提出了一种有向九宫格遍历算法,有效克服了map文件遍历算法中适应性差、效率低,视觉遍历算法中效率低、稳定性差等问题。通过采用视觉遍历,解决MAP遍历适应性低的问题;以九宫格为基本单元,引入贪心算法、有向遍历和距离换行准则,大大提高其效率和稳定性。该算法已成功应用在RFID封装设备中,应用结果表明,其适应性、稳定性和效率都有一定的提高,能够满足工业实际生产应用要求。
[1] 张智文, 射频识别技术理论与实践[M]. 北京: 中国科学技术出版社, 2008.
[2] 陶玉芬, RFID应用技术展望[J]. 电脑技术应用, 2006.
[3] 陈剑, 冀京秋, 陈宝国, 我国射频识别(RFID)技术发展战略研究[J]. 科学决策, 2010(1).
[4] 刘杆. 厚膜LED粘片机晶圆拾取路径方法研究[D]. 长春:中国科学院长春光学精密机械与物理研究所, 2006.
[5] 刘辉. RFID标签封装设备中机器视觉系统设计与实现[D]. 武汉: 华中科技大学, 2006.
[6] 魏婷. RFID封装线预绑定模块的视觉与运动集成研究[D]. 上海: 上海交通大学, 2007.
[7] 李晓峰, 赵海, 杜洪军, 刘小勇, 柔性流水作业排序问题的贪心算法求解[J]. 吉林大学学报(信息科学版),2009(6).
[8] 姜永军, 吴小洪, 何汉武, 罗丁, 姜石军. 图像识别系统在IC封装设备中的应用[J]. 半导体技术, 2005, 30(1).
[9] 丁汉, 朱利民, 林忠钦.面向芯片封装的高加速度运动系统的精确定位和操作[J]. 自然科学进展, 2003, 13(6).
