无线闭塞中心数据配置建模技术研究
2011-05-09温抿雄
温抿雄 江 明 吴 永
(北京全路通信信号研究设计院有限公司,北京 100073)
1 概述
无线闭塞中心(以下简称RBC)是CTCS-3(以下简称C3)级列控系统地面核心设备之一。RBC系统包括硬件和软件系统。软件系统运行的安全性、稳定性对列车的安全运行具有重要影响,而配置数据是组成RBC软件系统的重要部分,正确的配置数据是RBC软件逻辑运行的基础。
基础信号数据是C3级列控系统软件运行的基础。基础信号数据从设计的角度描述了各类设备的公里标,通过公里标的大小确定整个线路的结构和设备分布状态。但是,这样不能完整描述设备之间的连接逻辑关系,不能清晰描述线路的整个拓扑结构。RBC数据配置描述的是RBC内部逻辑软件运行需要的数据结构,二者的概念和结构相差都非常大。因此,如何从基础信号数据生成完整的RBC配置数据就是一个非常重要的工作。本文将研究一种统一的基础信号数据描述模型,介绍如何用该模型完整表示基础信号数据,以及如何建立各类计算模型及采用的算法,实现从基础信号数据模型到RBC配置数据的转换。
2 RBC配置数据模型分析
2.1 RBC数据使用的基础信号数据
线路结构复杂多变,设备种类繁多、属性各异。但是,总结起来主要可以分为以下几类。
1)点式设备主要包括应答器、信号机、道岔、绝缘节和边界等,分布在线路上。
2)线式对象主要包括轨道区段、进路对象、坡度曲线、速度曲线等,描述了一段一维线路的属性。
3)区域对象主要包括车站、分相区、紧急区等,描述了一个二维线路区域内的属性。
4)中心控制设备主要包括无线闭塞中心、联锁、临时限速服务器、列控中心等。中心控制设备管辖的范围,也可以看作是一个区域对象。
在上述分类的基础之上,将所有数据进行抽象,以统一的基础信号数据模型进行描述,然后再进一步构造出符合RBC逻辑的数据结构和各种线路数据参数。
RBC配置数据主要包括描述基本线路属性及设备连接关系的配置数据(简称基础配置数据)、描述进路属性的配置数据(简称进路配置数据)、其他与RBC通信的系统属性数据等。本文主要介绍基础配置数据和进路配置数据的概念、构造模型及主要生成算法。
2.2 RBC基础配置数据
为了统一描述各类设备及连接关系,RBC基础配置数据里将线路基础模型抽象为若干类对象,包括轨道单元、道岔以及其他对象,其他对象包括点式设备对象和区域对象。
轨道单元对象和道岔对象的特殊之处在于,它们是构成RBC数据拓扑结构的基础,通过轨道单元对象和轨道单元对象之间、轨道单元对象和道岔对象之间的相互连接,所有的设备全部可以建立起连接及所属关系,从而将整个线路构造为一个整体。其他数据对象都附着在轨道单元对象上。
轨道单元对象是线路的一段,一条线路上的两个相邻且公里标不同的设备之间的线路构成一个轨道单元对象。轨道单元对象包括了其长度,还附着了其他线路数据参数,包括线路速度、线路坡度、轴重数据等。
道岔对象是线路上的道岔,每个道岔定义为一个道岔对象,道岔对象包括3个腿,每个腿连接到一个轨道单元对象。
2.3 进路配置数据
RBC配置数据里另一个重要的部分是进路配置数据,其核心概念是进路对象。其他的相关数据完全是基于进路对象进行定义的。
进路对象类似于信号数据表里的一条进路。在线路上的两个信号机(起始信号机和终止信号机)及其经过的道岔序列唯一构成了一条进路[1]。两个信号机之间的道岔序列不同,路径就可能有多条,所以在两个信号机之间,会存在多条进路。
一个典型的进路对象可以定义如下:进路对象包括开始信号机、结束信号机、经过的道岔走位(结构为<道岔、入腿、出腿>)及其他附属属性。
3 数据模型的建立与计算
综上所述,可以得出以下结论:RBC配置数据的模型和基础信号数据线路都符合网状结构,也就是可以抽象为图结构。因此,用图抽象基础线路数据,将作为主要数学手段。通过对图的计算,转换为RBC需要的配置数据。
3.1 图的基本概念介绍
图是由若干给定的点及连接两点的线所构成的图形,图的二元组定义如下。
图G由两个集合V和E组成,记为G=(V,E)。其中,V是顶点的有穷非空集合;E是V中顶点偶对(称为边)的有穷集。将图G的顶点集和边集分别记为V(G)和E(G)[2]。
图可以分为无向图和有向图两种类型。
1)无向图
若图G中的每条边都是没有方向的,则称G为无向图。无向图中的边均是顶点的无序对,无序对通常用圆括号表示。
2)有向图
若图G中的每条边都是有方向的,则称G为有向图。有向图中一条有向边是由两个顶点组成的有序对,有序对通常用尖括号表示。
3.2 基础信号数据模型定义
借鉴图的定义,将线路网上的每个道岔抽象为图的一个顶点vi,连接两个道岔之间的相连的一条铁轨抽象为图的一条边(vi,vj)。另外,为了结构的完整性,将铁路网的每个边缘端点也抽象为图的一个顶点vi。
一个典型的站场线路可以被抽象为如图1中所示的图G1。G1里包含了4个站场的边缘端点、12个道岔、20条轨道,所以,抽象后的图里包括16个顶点和使所有顶点连通的20条边。
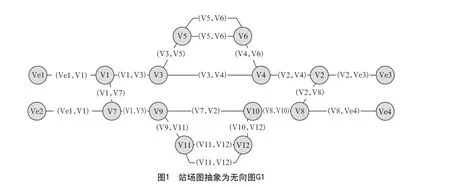
从图1的模型中可以看出,从道岔和端点连出的每一个腿,都连接到一个轨道上。每个轨道具有两端,分别连着一个腿。
对于除了道岔和端点之外的其他点式设备,将其放置在轨道上。在RBC的模型里,原本的线式结构轨道区段可以退化为类似于应答器之类的一个设备点,也同样放置在轨道上。这样,通过图形的连通,各种设备之间也就具有了连接关系。
对于坡度曲线和速度曲线,也将其定义为轨道上某一段的数据特性。
对于中心控制设备、区域对象,将之定义为一个连通子图(根据其管辖范围来划分),统称为区域,可以看作为整个站场图的一部分。这体现出本模型的一个优势,将信号数据表中一维的管辖范围扩展为图中的二维范围,可以灵活且准确地表示中心控制设备和区域对象的管辖范围。
3.3 基础信号数据模型的面向对象表示
基于图定义的数学模型,用程序设计学方法定义对象及其关系[3],以便于后面的进一步计算。
使用面向对象的方式表示点式设备和轨道之间逻辑上的关系,如图2所示。
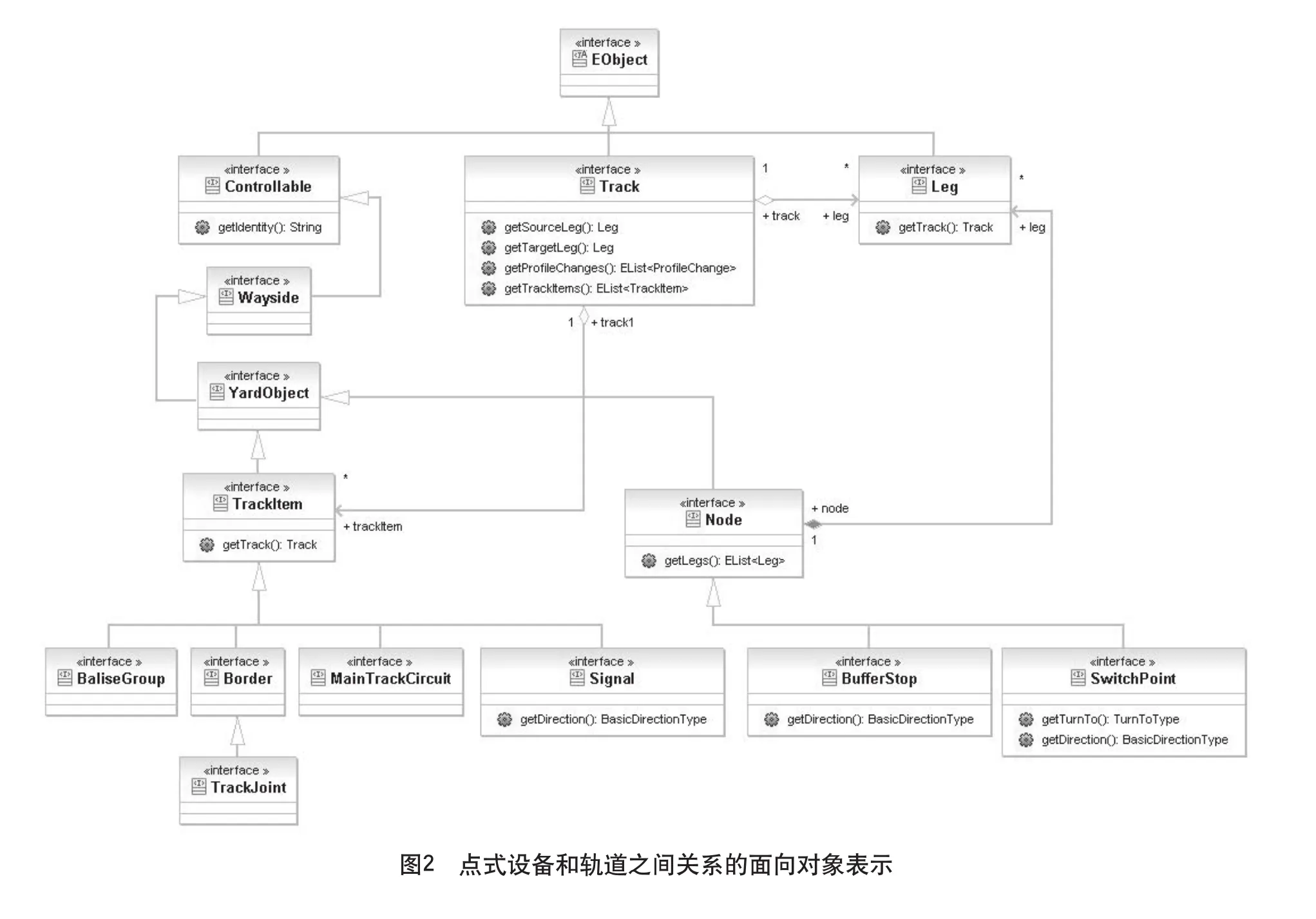
Track为轨道,表示图里的边。
Node表示图里的顶点,分为Bu fferStop(端点)和Sw itchPoint(道岔)。
T rack Item表示各类轨道上的设备,包括 T rack Jo in t(绝缘节)、Sign a l(信号机)、M ainTrackCircuit(轨道区段)、BaliseGroup(应答器组)等。
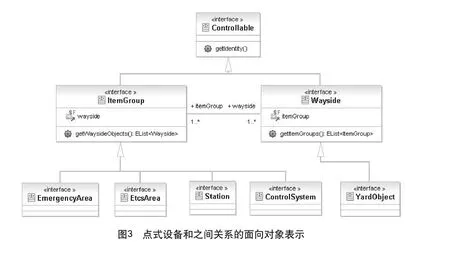
使用面向对象的方式表示点式设备和区域之间逻辑上的关系,如图3所示。
W ayside表示所有类型的点式设备。
Item G roup表示所有类型的区域,包括Em ergency A rea(紧急区)、EtcsA rea(分相区)、Station(车站)、ControlSystem(中心控制设备)。
一个Item Group包括了多个W ayside,同时一个W ay sid e可以属于多个Item G rou p。即每个区域管辖多个点式设备。每一个管辖范围的所有点式设备及其他对象,可以构成一个逻辑运算集合。
3.4 模型数据计算
建立基础信号数据模型之后,需要从该模型计算出RBC需要的各类配置数据。本节首先介绍计算时需要用的图的基本计算方法,然后具体介绍如何计算RBC配置数据。
3.4.1 基本概念和计算方法
基础信号数据模型是按照无向图的方式定义的,但是,在后续的计算过程中,由于线路本身具有上行、下行,设备以及进路等都具有正向、反向等概念,所以在具体进行某一类计算时,将图视作有向图,利用有向图的概念和方法进行计算。
本文主要涉及到有向图的路径和遍历算法两个概念。下面首先做一简单介绍。
在有向图G中,路径也是有向的,它由E(G)中的有向边
深度优先遍历是重要的遍历图的方法之一,采用的搜索方法的特点是尽可能先对纵深方向进行搜索。具体的过程递归定义如下:在给定图G中任选一顶点v为初始出发点(源点),首先访问出发点v,并将其标记为已访问过;然后依次从v出发搜索v的每个邻接点w。若w未曾访问过,则以w为新的出发点继续进行深度优先遍历,直至图中所有和源点v有路径相通的顶点均已被访问为止。若此时图中仍有未访问的顶点,则另选一个尚未访问的顶点作为新的源点重复上述过程,直至图中所有顶点均已被访问为止。
本文对图进行计算时,将方向统一定义为左方向和右方向;具体设备的站场方向属性可以通过设备的方向、线路等相关属性得到。
3.4.2 RBC基础配置数据计算
如第2章所述,RBC基础配置数据核心是将线路基础模型抽象为轨道单元对象、道岔对象,以及附着在轨道单元对象上的其他数据对象。
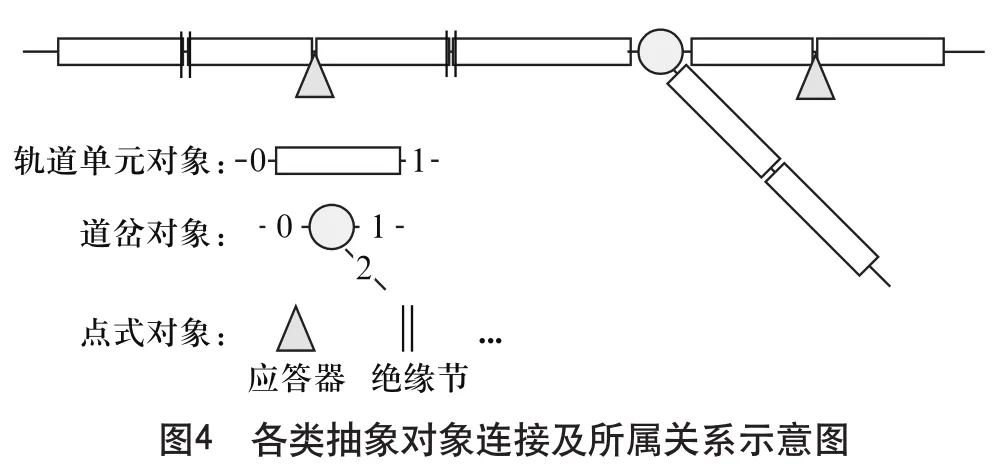
如图4所示,每个道岔定义为一个道岔对象。道岔对象,具有3个腿,分别赋予0、1、2。轨道单元对象是线路的一段,具有两个腿,左边的赋予0,右边的赋予1。
轨道单元对象的连接数据包括左边和右边连接的轨道单元对象或道岔对象;道岔对象的连接数据包括3个腿连接的轨道单元对象。通过轨道单元对象之间以及轨道单元对象和道岔对象之间的相互连接,整个线路连接为一个整体。
如图4所示,应答器、绝缘节等作为划分轨道单元对象的点式设备,被归属到相关的轨道单元上,作为其附加数据的一部分。
坡度数据、速度数据等信息也按照轨道单元的边界划分进行映射。
分相区、车站等区域对象,区域对象与点式设备具有所属关系,通过点式设备,所有的区域对象也和轨道单元对象间接地建立了关联关系。
RBC基础配置数据中的主要数据结构建立完成之后,其他的辅助数据通过对此数据结构的进一步计算即可得到。
3.4.3 进路配置数据计算
进路配置数据的核心是构造进路对象。将论述如何根据基础信号数据模型来生成进路对象。
在基础信号数据模型里,信号机分布在轨道上,轨道通过道岔连接,形成图结构。因此,需要对整个图结构进行搜索,才能计算出所有的进路。
搜索方法也是基于图的深度优先搜索策略。因为具有两个方向的信号机,同向信号机之间才能形成进路,所以以一个方向的搜索过程为例,介绍其主要思路如下。
1)轨道内的进路
对于一个轨道Ti,按照信号机在轨道上的位置排序,依次选择与搜索方向一致的信号机,组成集合 S(Ti)={s1,…,si,sj,…,sn},则
2)跨多个轨道的进路
在跨越多个轨道搜索进路时,将同一方向的信号机也抽象为有向图的顶点。搜索时,起始信号机作为搜索的开始顶点,终端信号机作为搜索的结束顶点,而经过的道岔是搜索路径上的中间顶点,经过的轨道是搜索路径上的边。
从一个信号机所在的轨道Ti出发,获取到某一方向上的最后一个信号机作为进路起点信号机,开始按照深度优先遍历的方法沿着同一方向搜索,记录搜索过程中经过的道岔等信息,每次找到一个终点信号机,则搜索到一条进路,加入进路集合Rou te(G),直至找到所有可能的终点信号机。
一个典型的跨轨道搜索示意如图5所示。该图里,步骤1到步骤10依次执行,描述了从一个信号机出发跨越多个轨道后找到3个进路对象的过程。

对于所有轨道的集合T(G)里轨道依次按照上述方法搜索,则将得到整个站场图里的进路对象集合Route(G)。
3.4.4 模型计算小结
将基础信号数据模型定义为无向图的结构,包括了所有需要的各类信号基础数据。
在基于模型进行进一步计算时,针对具体计算需求,提取基础无向图里的不同数据,构造了不同的计算模型,利用有向图的搜索算法,实现对数据准确高效地计算。
4 评价与结论
本文首先对RBC的数据模型、C3级列控系统所用的基础信号数据特点进行了分析;然后借鉴图论的方法,对基础信号数据进行建模,将线路数据抽象为一个无向图,将各类数据附加到图的顶点和边上,进而利用图的各种算法,进行进一步的建模和计算,得到了RBC配置数据。本文提出的方法具有良好的适应性,可以适应各类复杂的站场数据情况,有效提高了无线闭塞中心配置数据生成过程的效率和可靠性。
[1]陈志颖,董昱,杨柳,等.计算机联锁进路搜索算法的分析与研究[J].铁道通信信号.2007,43(4):4-6.
[2] Thomas H.Cormen,Charles E.Leiserson.Introduction to Algorithms[M].2nd ed.The MIT Press,2001.
[3] Michael Blaha,James Rumbaugh.Object-Oriented Modeling and Design with UML[M].2nd ed.Prentice Hall/Pearson,2004.
