动态RCS测量的信号仿真
2011-05-08周建江李海林
周 霞,周建江,李海林
(南京航空航天大学电子信息工程学院,江苏南京 210016)
雷达散射截面是度量目标在雷达波照射下产生的回波强度的物理量,是雷达探测与识别、隐身与反隐身研究的基础,是现代军事对抗技术的主要内容[1]。RCS测量是获取目标电磁散射特性的一个重要手段,按测量对象可分为动态测量和静态测量两大类,这两种方式互为补充,不能相互替代,静态RCS测量一般在飞机方案论证和设计阶段大量进行,而最终隐身指标的确认则由空中动态RCS[2]测量来完成。通过动态测试,不但能够反映在真实背景环境下的目标散射特征,而且可以反映出目标的活动部件运动、机身与机翼挠动和振动产生的调制影响以及发动机尾喷焰对目标整体RCS的贡献,而这一点是静态RCS测量所无法比拟的。另外,RCS动态测试突破了微波暗室缩比模型静态测试[3]或全尺寸目标静态测量[4]的技术瓶颈,为我国未来武器装备的发展提供技术支持,因此,对动态RCS测试数据的仿真和处理成为当下研究的重要课题。
在真实动态RCS测量中,测量产生的数据有雷达伺服、机载姿态和雷达回波数据。分析、计算这些数据可以得到随时间起伏的RCS值,统计分析动态RCS数据,对目标特性的研究具有重要意义。文中目的就是开发动态RCS测量的雷达信号仿真与管理系统,在没有实测数据的情况下,为RCS动态数据统计分析提供数据保障,同时为真实RCS数据统计分析提供了理论依据,且该系统已成功应用于某研究所。
1 系统仿真功能实现
系统开发流程如图1所示,首先利用像素法产生各目标的RCS数据,然后基于点目标模型,仿真飞机在扰动下,直行、盘旋运动轨迹下的雷达伺服和载姿态数据,最后仿真雷达回波数据。在仿真过程中,系统需要处理若干雷达目标的众多参数,其中包括雷达波段、工作频率、极化方式、采样时间、飞机俯仰角、飞机横滚角、飞机真航向、雷达方位角、雷达俯仰角、目标距离和回波功率等。为便于用户管理,该系统搭建在SQL Server的环境上,将仿真相关的所有参数存放在数据库中,以提高数据访问效率和可靠性。

图1 系统开发流程图
1.1 RCS仿真
RCS仿真结果产生的是各雷达目标在不同工作波段、频率和极化方式下,每个视向方位角和俯仰角对应的RCS值。该部分仿真结果由某大学目标特性研究中心,RCS像素法仿真软件计算得出,且最终导入数据库,供用户查看、使用。像素法[5]是一种将高频物理光学法与计算机图形学相结合的RCS计算方法,它的基本思想是对目标投影在计算机屏幕上的每个像素计算RCS,最后综合得到目标雷达反射特性数值。“像素”也就是计算机屏幕上,组成图像的最小单位,而这些像素点,也可以视为雷达射线与目标表面相交的点集。图2给出了利用像素法仿真软件仿真F22的RCS随方位角变化的结果,由于形体具有对称性,所以只给出了0°~180°范围内的变化情况,其中雷达工作在Ku波段,频率12.5 GHz,极化方式HH,俯仰角0°。
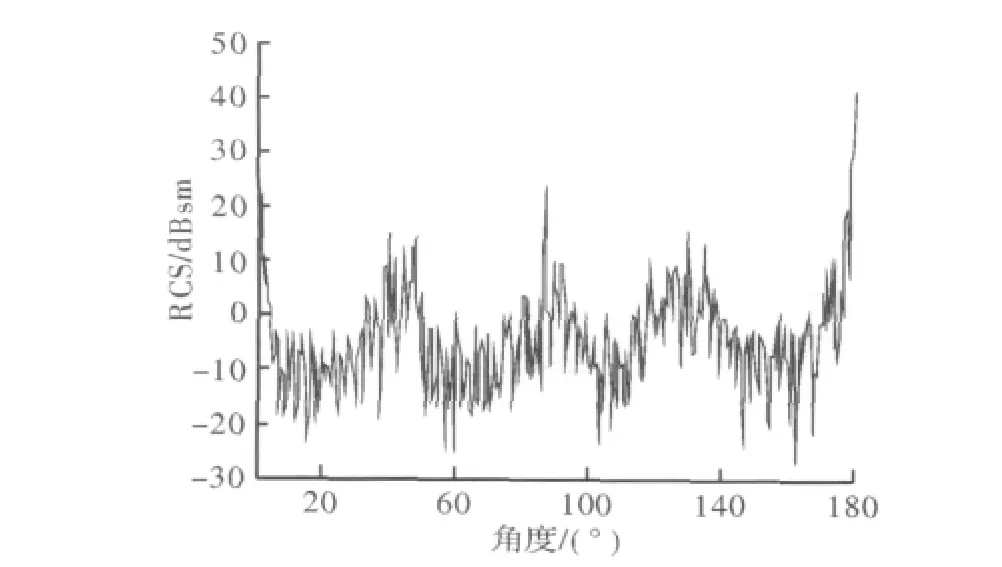
图2 某飞机的RCS仿真结果
由图2可以看出,该软件的仿真结果具有可靠性,可用来仿真各目标的RCS,保证了后续动态RCS仿真正确性。
1.2 航迹路径仿真
航迹仿真采用点目标模型,在目标航迹的每个时刻点上认为其RCS是一个定值,等于该目标在相同姿态下的静态RCS值。基于该模型,本系统首先仿真产生了雷达伺服数据和机载姿态数据,在视向角合成后,得到随时间变化的视向角序列,通过检索数据库中像素法产生的RCS,即可以得到动态RCS序列。

图3 雷达坐标系
在该模块的实现过程中,主要涉及雷达坐标系和飞机坐标系,以及两个坐标系的转换。在雷达坐标系中,一般取正东方向为X轴,正北方向为Y轴,雷达方位角、俯仰角和目标距离如图3所示;在飞机坐标系统中,一般取平行于机身轴线且指向前为XV轴,右机翼指向为YV轴,满足右手法则,视向方位角和视向俯仰角φE如图4所示。在一次航迹仿真后,系统将生成雷达伺服数据,如时间、雷达方位角、雷达俯仰角和目标距离等参数,以及机载姿态数据,如同一时刻下的目标真航向角φ、目标俯仰角θ和目标横滚角γ等参数。

图4 飞机坐标系
视向角合成,即雷达坐标系转换为飞机坐标系的公式为

其中,当忽略地球曲率半径的影响时,

在航迹路径的仿真上,文中设计了3种航迹路线:
(1)径向直线飞行,对仿真飞机隐身性能测试中的关键指标——最大可探测距离具有重要意义。使用较多的航迹路径是相对雷达径向临近、然后再径向远离的等高飞行,且航线中点为雷达顶空,该航迹中最大可探测距离为纵向逼近距离和尾向暴露距离,假设在飞行过程中,目标的真航向、俯仰角和横滚角保持不变。
(2)横向直线飞行,且假设目标的真航向、俯仰角和横滚角保持不变,此航迹路径中,视向方位角近似为0°~180°全方位变化,视向俯仰角在距离雷达横向距离最短时达到最大,横向距离R满足RCS远场测量条件R≥2d2/λ,其中,d为飞机的横向尺寸;λ为测量雷达工作波长。
(3)盘旋飞行,即以测量雷达顶空为盘旋中心,目标到雷达的距离保持不变,在同一高度飞行,如果目标的真航向、俯仰角和横滚角保持不变,那么视向角度将是不变的,对某一视向角的RCS统计分析提供数据保障。
3种航迹路径的仿真,可以得到方位角一定时,动态RCS随俯仰角变化的情况,也可以得到动态RCS随方位角的变化情况,同时可以利用滑动窗口法统计分析某一视向角的RCS,对雷达隐身性能评估有着重要意义。
1.3 扰动添加
在实际动态RCS测量过程中,一般采用相对测量法,即通过对标准体进行标定实验,然后再测量、计算出复杂目标的RCS。因此,RCS的误差来源于测量过程引入的误差和标定过程引入的误差。在实际飞行测试过程中,由于飞行过程中气流的抖动、背景噪声、测量雷达的性能以及飞机性能等多因素的影响,会对测量带来各种误差,这些误差一般根据实测经验数据统计得出。表1列出了航迹测量过程中主要参数的扰动,且服从高斯分布。

表1 动态测量中主要参数的扰动
表1中各参数的扰动对动态RCS的影响,最终可以归结为视向方位角、俯仰角产生的影响,其中一种飞行扰动模型[6]为

式中,φA(t+1)、φE(t+1)为t+1时刻视向方位角、俯仰角的扰动量,Δt为采样间隔,T为目标扰动周期,N(0,1)为在[-1,1]区间上服从标准高斯分布的随机数,σA、σE为视向方位角、俯仰角扰动方差。
设计中取 Δt=5 ms、T=8 s、σA=0.5°、σE=3°,用户在界面操作上,输入目标机起始坐标(-10,-40,8)km、终点坐标(-10,40,8)km,飞行速度700 km·h-1,采样间隔50 ms,则添加视向角度和距离扰动后,一次直线航迹仿真结果如图5所示。

图5 直线航迹仿真
1.4 动态回波数据仿真
动态回波仿真就是计算每个采样时刻的回波值,采用收发天线分置的雷达方程公式,且对于单基站雷达,有

式中,K为雷达常数,由标准金属球经过标定试验测量、统计得出,与雷达性能相关,因此由界面输入;Lm为雷达系统到目标之间的大气传输损耗,跟测量的天气、环境等因素有关,且损耗随距离不同而不同,也由用户界面输入;σ(φA,φE)为检索数据库得到的RCS值。
利用图5仿真的航迹,以及目标F22在雷达工作波段Ku、频率12.5 GHz和极化方式 HH下的静态RCS数据,仿真该航迹下的动态RCS以及回波数据。图6中实线表示该航次下,添加扰动后的动态RCS值,虚线表示未添加扰动的动态RCS值。图7为该航迹下,添加扰动后的回波序列。


如图6和图7所示,飞行过程中角度、距离的随机扰动,对目标RCS值影响很大,在真实测量过程中,如何从扰动中提取正确的RCS是个难题,因此分析仿真数据,对动态RCS的研究具有重要的参考价值。其中,曲线中存在小部分平坦线段,这是由于RCS仿真精度的限制,在检索数据库时,如果数据库中不存在某视向角下的RCS,则利用相邻角度的RCS替代,完全符合真实测量中的精度要求。另外,该部分实现的难点就是,每仿真一次航迹,就必须检索该航次中每个时刻的静态RCS值,如果采样间隔为1 ms,飞行时间为5 min,那么一次飞行中将产生30万个采样点,对每一点都检索一次数据库,将会消耗很多时间,也会造成界面假死状态,因此数据库操作的加速和编程中多线程的使用是必须的。
2 数据库、界面设计
2.1 系统结构
为便于用户访问和操作数据,系统采用了3层的C/S结构,即表示层、中间层和数据层,如图8所示。与两层的C/S结构相比,客户端不直接与数据库相连,增加了访问的安全性。
表示层负责用户与系统的交互,是在Visual Studio 2008平台上开发的窗体程序。客户端的功能包括:支持用户以不同的权限访问、添加、修改或删除数据库中数据;依据隐身性能研究要求,设计飞行航迹路径,且直观地显示出理想路径;计算添加扰动后的动态RCS、回波数据存入数据库中。表示层将用户操作数据库的请求传递给中间层,然后由中间层把结果返回给用户,而不直接访问后台数据库。

图8 3层C/S设计结构
中间层是连接客户端和数据库服务器的桥梁,采用了ADO.NET存储技术。中间层执行用户发来的Transact-SQL语句,数据库服务器处理完成后,将结果反馈给用户。中间层其实是把数据库操作中频繁用到的功能进行封装,并规范统一的接口,供其他层调用,中间层的应用可以提高企业级应用的性能,增强了系统的可移植性。
数据层主要负责动态测试仿真数据的存储、管理和处理。在数据表格的建立中,设计了一个检索表格,所有表格都是动态建立的,不仅管理方便,而且可伸缩性强。
2.2 数据库操作
系统采用数据库除了用来存储大容量数据外,还用来加快数据查找和计算的速度。在ADO.NET技术中,采用 SqlConnection、SqlCommand、SqlDataReader以及SqlDataAdapter类来连接访问数据库,执行Transact-SQL语句,并读取结果,其中SqlDataReader是一种只读、快速的单向流,适合内存紧张时检索大量数据,且访问数据速度快;应用 DataSet、DataTable、DataRow、DataColumn来存储独立于数据域的数据结构和内容,因此常用于在内存中缓存数据源检索到的数据,方便用户计算和界面显示;同时,应用 DataRelation和Constraint类保证了数据的完整性。
在RCS仿真数据入库的过程中,对大批量的仿真数据,没有采用INSERT语句逐行插入新数据,而是用.NET中的SqlBulkCopy类来进行批量更新,它首先从数据文件中读入一块数据存入DataTable或DataReader中,然后通过数据流直接对数据库表格装载,其原理等同于SQL Server的BCP协议进行数据的批量复制。在少量数据入库时,INSERT语句跟SqlBulkCopy类的性能差不多,但对大数据量的数据来说,如果频繁连接数据库、操作数据库表格,则运行效率低且系统性能差,SqlBulkCopy类的使用大大提高了数据入库的速度。
3 结束语
基于SQL Server数据库的动态RCS测量的信号仿真系统,使用户能方便、快速地检索多个雷达目标在不同雷达波段、工作频率和极化方式下的RCS仿真数据,逼真地仿真了目标在指定条件下的航迹数据,且直观地显示了视向合成角度随时间变化的曲线,最后仿真了飞行过程中不可避免的扰动误差,得出不同航迹下的动态RCS及回波数据,为没有雷达实测数据的RCS统计分析,提供了可靠地仿真数据源,对目标隐身与反隐身技术的研究有着重要的实用价值。
[1]黄培康.雷达目标特性[M].北京:电子工业出版社,2005.
[2]JAIN A,PATE I.Dynamic imagine and RCS measurements of aircraft[J].IEEE Transactions on Aerospace and Electronic Systems,1995,31(1):211-26.
[3]郭静.微波暗室目标RCS测试方法的研究与实验[D].南京:南京航空航天大学,2008.
[4]CHAN K K,WONG S.RCS predictions and measurements of a full size jet engine model[J].IEEE Antenna and Propagation Society International Symposium,2005,3A:97-100.
[5]昂海松,舒永泽,周建江,等.复杂目标RCS计算的新方法——曲面像素法[J].电子与信息学报,2001,23(10):962-969.
[6]李民权,吴先良.飞行目标的抖动及雷达散射截面计算[J].合肥工业大学学报:自然科学版,2003,25(5):1021-1024.