高速铁路列车自动驾驶系统的研究和仿真实现
2011-05-08陆小红
陆小红,郭 进
(西南交通大学 信 息科学与技术学院,成都 6 10031)
铁路智能化的发展和对运输效率要求的提高,也确定了列车自动驾驶(ATO)必将成为我国高速铁路列控系统的发展趋势。
ATO作为列车运行控制系统的核心子系统,在列车自动防护(ATP)的安全防护下,实现列车自动驾驶,达到高效、准点、舒适、节能、精确停车的目的[1]。而ATO技术是利用计算机技术对列车运行进行模拟和仿真,寻找合理的优化操纵方案,保证列车运行的安全性、时间性、精确停车及乘客舒适性。本文的重点就是综合考虑以上各指标,设计出列车自动驾驶算法,建立仿真系统,寻找较优的操纵方案,生成列车实际运行曲线,并对相关数据进行记录存档。仿真系统还可以根据不同的线路情况对列车的运行轨迹作相应的调整。
1 ATO系统结构
要实现ATO的功能,首先要通过应答器和轨道电路上传线路参数及移动授权信息到车载设备,车载设备生成ATP防护曲线,并在其防护下,实现列车的安全运行。其系统结构如图1。
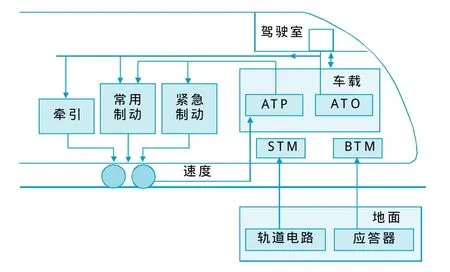
图1 ATO系统结构图
ATO是实现列车高质量的自动驾驶,自动完成列车启动、牵引、巡航、制动控制的设备。对前行列车进行合理追踪,确保达到旅行速度和设计的时间间隔,使列车速度自动调整到最优范围内,以减少牵引、巡航、制动间的切换,达到节能目的。
2 ATO控制算法
列车自动运行过程由3部分组成:列车启动阶段、列车运行阶段和列车停车阶段。对列车的运行过程分此3段进行算法控制,寻找合理的优化操纵方案,给出最优控制力来控制列车运行。
2.1 列车启动阶段
采用最短运行时间策略,以最大牵引力运行,使列车在最短的时间内启动并运行。
利用公式:

Fx— 牵引力;
W0— 基本阻力;
Wj— 单位附加阻力。
计算得出相应的加速度进行列车运行控制。
与此同时,该过程亦要与反馈的加速度信息进行比较,根据我国在TB/T2370-1993《铁路旅客纵向动力学试验方法与评定指标》中规定的旅客纵向加(减)速度的评定指标,即保证其平均加(减)速度的绝对值不超过0.08 g(a<0.784m/s2),以保证舒适度这一性能指标。
另外,列车在启动阶段,即列车处于牵引工况时,列车的能耗主要表现在提高列车动能和克服运行过程中的阻力,故本文采用的列车在最大牵引力下运行的策略,有助于减少能耗。
2.2 列车区间运行阶段
为了研究铁路线路的限速情况,设定了一个临时限速区,因此列车在这一阶段运行有3种运行工况:从高限速区进入低限速区、常数速度监视区(CSM区)和从低限速区进入高限速区的运行。
(1)从高限速区进入低限速区:为保证安全性,防止列车超速运行,在这一运行区段必须提前减速,可等价为制动工况,并以临时限速为目标速度,其控制算法与停车阶段类似。
(2)进入常数速度监视区(CSM区):列车自动寻找合适的牵引力使其与阻力大致相等,从而实现列车的巡航;常数区间贴线巡航,使列车在运行中拥有良好的舒适性、高效性和节能性。
(3)从低限速区进入高限速区:采用最短运行时间策略,与启动阶段类似,以最大牵引力运行。
2.3 列车停车阶段
ATO系统控车最大的优势在于更加细致、稳定、安全的控车性能。为了确保列车在ATO控制下稳定地精确停车(误差±25 cm范围内),本算法在停车阶段对制动起模点、列车停车过程中制动档位的选择和其变化的频率,进行精确计算,设计合理的操纵策略,确保列车停车的稳定性、安全性和精确性。
(1)列车停车制动起模点的确定
停车阶段取不同的制动起模点,列车的停车位置有所不同。根据多组仿真测试结果分配权重打分的方法,确定该起模点。
a.确定最大常用制动曲线的起模点stop;
b.根据最大常用制动的起模点位置,前推不同的距离,确定列车停车阶段的制动起模点,如stop-300 m、stop-350 m等;
c.取不同的制动起模点,记录ATO影响列车运行的性能指标,即记录列车运行后对应的停车误差、运行时间、档位变化频率和是否触发最大常用制动等信息,得到表1所示的列车各运行信息,其分别对应着停车精度、时间性、舒适性和安全性等性能指标。

表2 根据信息值反推的打分表
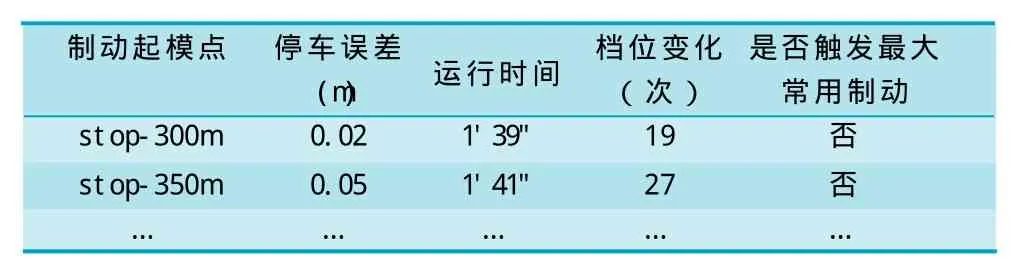
表1 列车运行各信息值
d.分配权重,停车阶段中对于停车精度这一主要的性能指标,分配70%的权重,其余几项分别分配10%的权重,再反比打分,对应表1的性能指标分配权重并反比打分得表2。
e.取综合得分最高的列车制动起模点,列车在该处开始制动会取得最好的停车效果。
(2)列车停车过程中制动档位的选择
列车停车是通过制动力控制列车减速,从而使其在目标停车点前停车,实际列车中制动力表现在制动档位的变化上,列车选择不同的制动档位,列车的停车点位置不尽相同。
建立数学模型如下:
a.读取当前列车所在位置s0和列车速度vh;
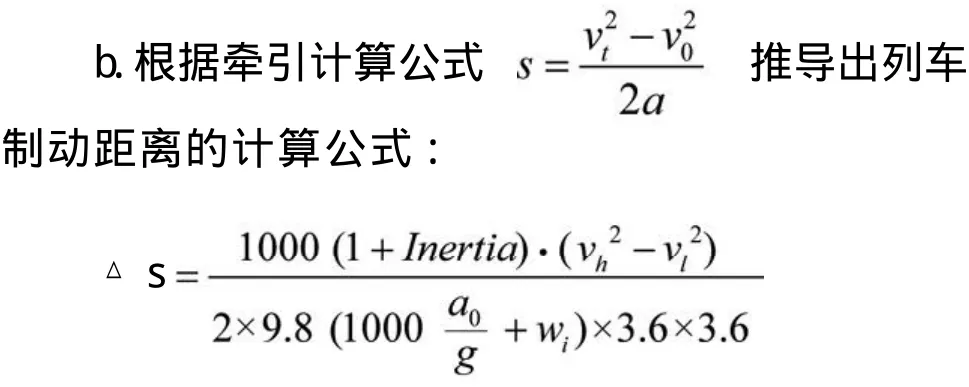
式中:△s—列车的制动距离;
Inertia—列车的质量回转系数,值为0.075;
vh—列车当前速度;
vl—列车上一时刻速度,初值为列车运行的目标速度,停车阶段其值为0km/h;
wi—单位列车附加阻力;
a0—单位列车基本阻力;
c.系统根据地面上传的目标停车点end,与上述公式计算所得的制动距离△s,自动计算出各制动档位即不同的减速度对应的停车误差end-(s0+ △s);
d.根据不同的停车误差,系统自动比较,取其中使停车误差最小的档位实施制动,最后达到精确停车的目的。
(3)列车制动档位变化的频率
制动档位变化的频率越高列车停车精度相应的越高,但制动档位频率的变化涉及到乘客舒适性,故需综合考虑停车精度和舒适性两性能指标,通过仿真实验得到大量数据,再应用专家打分法来分析确定制动变化的频率,方法类似于对制动起模点的确定。
3 仿真验证
以合宁线的全椒-黄庵段线路为例做仿真,该段的区间距离为21.087 km,列控制式采用CTCS2级,动车型号是CRH1型,列车的定员载荷质量为474 t,长度为214 m。
仿真系统主要由3部分构成:
(1)地面数据上传生成列车模拟运行界面和ATP防护曲线。
列车按照CTCS2级列控车载系统标准运行,在ATP的防护下,实现安全运行,本仿真系统兼容人工驾驶。
(2)根据ATO算法控制列车自动驾驶,如图2、图3分别为列车运行过程中列车的牵引制动档位的变化曲线和列车的运行时间、停车误差及触发ATP限速曲线的记录。

图2 列车牵引制动档位变化曲线

图3 列车运行记录数据
列车牵引制动等级变化曲线是对自动驾驶操纵过程的记录,其平稳的变化过程证明了运行中良好的舒适性;同时列车运行后记录的数据表明列车在21.087 km的线路上仅运行8 min24 s,停车精度达到0.01 m,并且没有触发最大常用制动或紧急制动,仿真结果展示了列车在本ATO算法的控制下,完成了高质量的自动运行。
(3)记录列车运行信息并设置曲线回放功能,用以查看以往的列车运行记录,从而改进驾驶技术和确定事故责任。
4 结束语
本文研究了列车自动驾驶,包括启动、区间调速及定点停车各阶段的算法,确定了较优的列车操纵方案,综合考虑了舒适性、停车精度、准时性等性能指标。通过对合宁线全椒-黄庵区段的仿真,证明采用本文设计的ATO系统,能够在ATP的监控下很好地按照操纵策略行车,达到了较好的自动驾驶控制效果,符合行车技术要求。但由于列车运行过程极其复杂,要真正实现列车自动驾驶还需继续深入研究。
[1] 王长林,林 颖. 列车运行控制技术[M]. 成都:西南交通大学出版社, 2008,72-73.
[2] 刘海东,毛保华,丁 勇,何天建. 列车自动驾驶仿真系统算法及其实施研究[J]. 系统仿真学报, 2005,17(3):577-578.
