现代铁路列车跟踪与定位技术的研究
2011-05-08张洪宇
张 源 , 张洪宇
(1.中国铁道科学研究院 通 信信号研究所,北京 1 00081;2.中国铁道科学研究院 铁道科学技术研究发展中心,北京 1 00081)
现代铁路运输的根本目的就是在确保运输安全的前提下,快速、准时地将旅客或货物运送到目的地。因此对列车运行位置、速度和状态信息的实时监控不仅是列车控制系统所需要的,而且是运输组织、旅客服务、安全监控及其它运输组织所必须的关键基础信息。目前,列车跟踪与定位在系统结构、系统组成、技术标准和技术条件等方面尚未形成完整的体系。根据中国现代铁路的特点,结合信号系统体系结构、列车运行控制系统技术方案、通信系统组成方式以及现代铁路信息系统对列车跟踪与定位信息的需求,提出面向系统的解决方案是非常必要的。
1 列车跟踪与定位技术在现代铁路运输中的作用
在现代铁路运输系统中,列车跟踪与定位是一项十分重要且关键的技术,在运输调度指挥、列车运行控制和运输管理中发挥着重要作用。它除了保证提供正确的列车位置信息外,随着铁路运输朝着高速、便捷、舒适的方向发展,对列车定位技术的精密度也提出了更高的要求。列车跟踪与定位系统所产生的实时位置与速度信息主要应用在以下几个方面,见图1。
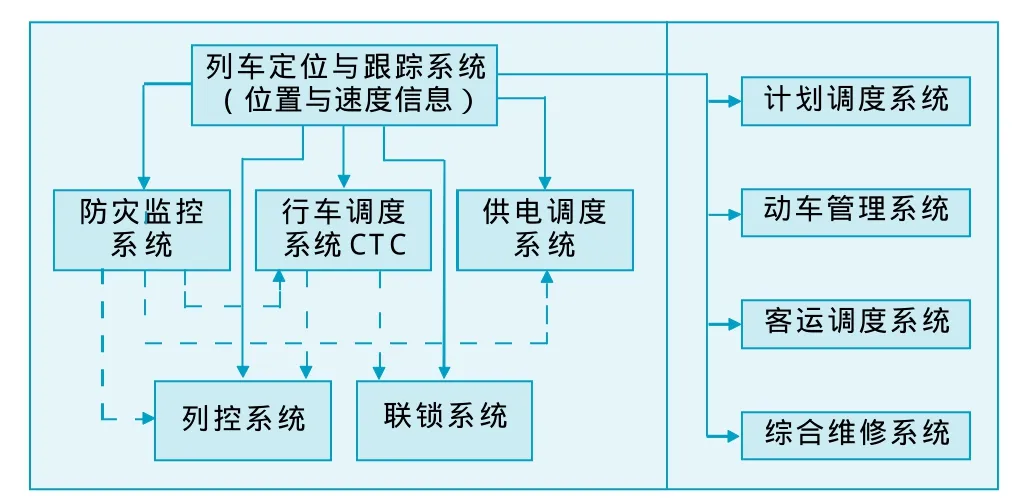
图1 列车跟踪与定位系统在现代铁路中的作用示意图
2 列车定位技术综合分析
铁路列车跟踪与定位技术归纳起来有3种基本方式:(1)车载定位:车载设备完成列车定位和完整性检查,通过无线通信将车次与位置等信息传送到相应的系统。(2)地面定位:由地面设备完成列车定位和完整性检查,通过无线通信将车次与位置等信息传送到车载设备,并通过有线通信传送到相应的系统。(3)车载地面结合定位:由车载和地面设备共同完成列车定位和完整性检查,通过无线通信交换相应的信息。
3 现代铁路列车跟踪与定位推荐方案
通过对现代铁路列车跟踪与定位系统的分析及国际上最新列车定位技术的研究,提出本系统技术方案,并在京承线、京山线开展了试验,取得了大量的试验数据。
3.1 基于全球定位系统和铁路无线通信网络的列车跟踪与定位系统
3.1.1 系统结构
系统由GPS接收天线、GPS接收机、列车定位处理单元、线路数据存储器、车载数据阅读/发送器、地面数据阅读发送器、司机数据卡、信息共享平台组成。系统基本结构如图2。
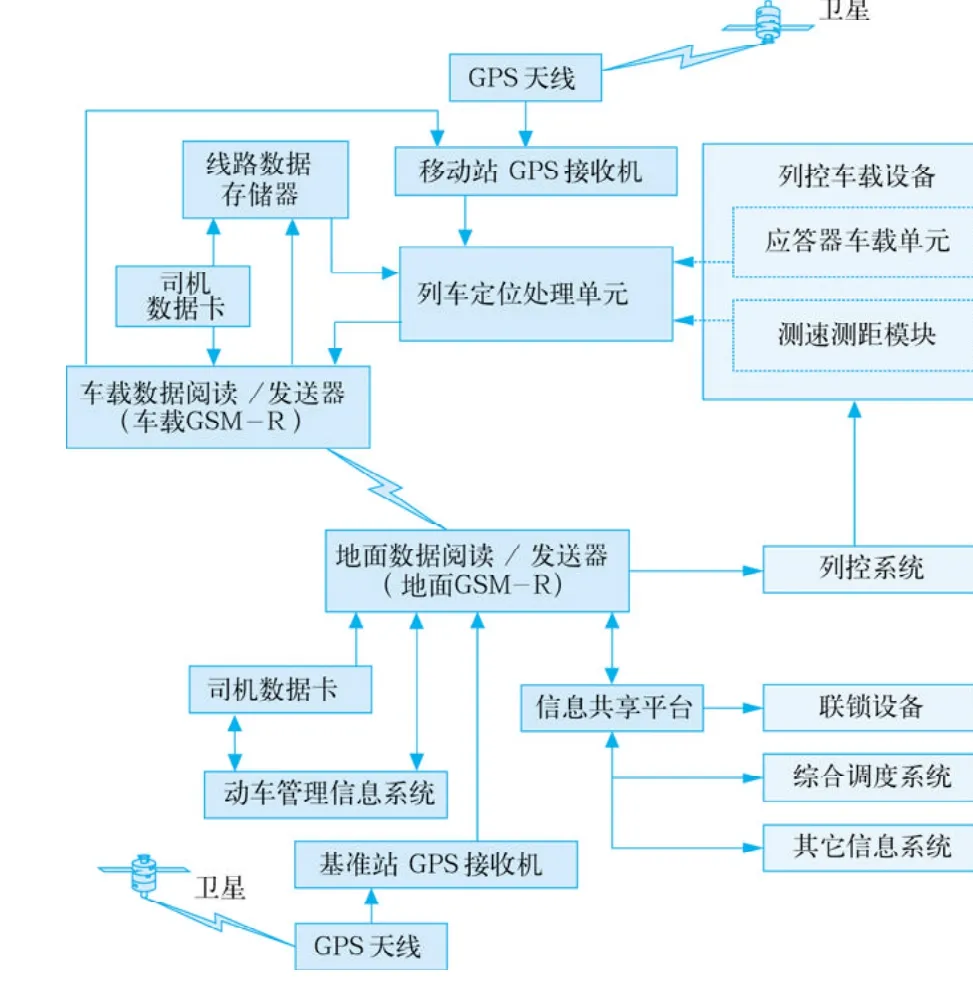
图2 基于GPS的现代铁路列车定位系统框图
在我国,平行轨道的最小中心距离为3.8 m,一般情况为4.5 m~5.0 m。目前GPS系统提供的单机优于5 m的定位精度不能满足列车跟踪定位的需求,为此,我们通常采用差分GPS(DGPS)技术。
3.1.2 多基准站定位列车跟踪与定位系统试验
多基准站列车跟踪与定位系统,由基准站分系统、移动站、无线通信、数据中心组成。基准站分系统由若干个工作于RTK基准站模式的接收机和GPS天线与相应的数据接口模块组成。移动站分系统由工作于RTK移动站模式的接收机和GPS天线组成。系统能够实时完成监控列车的精密定位及定向,提供监控列车间的相对或绝对位置、速度等信息,并能为其它设备提供标准的时间同步信号。
基准站分系统由沿线路分布的GPS接收机及相应的GPS天线构成,如图3。基准站GPS天线架设于位置已知的空旷高处,接收来自GPS卫星的信号。基准站GPS接收机利用来自天线的卫星信号和已知的位置计算出相应的原始数据与改正数据并将这些数据送到数据接口模块进入无线通信系统。
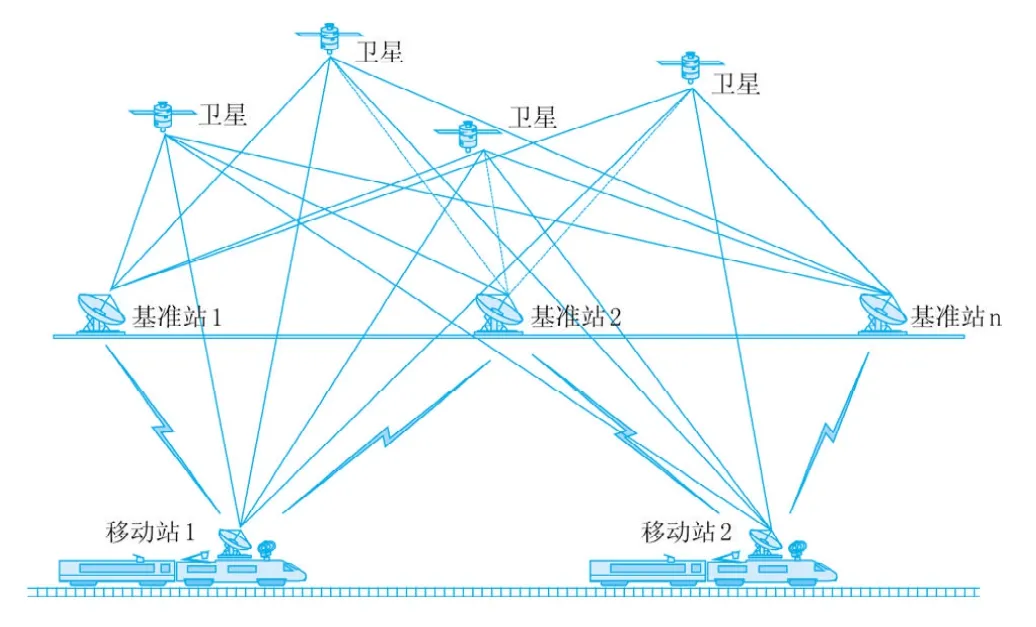
图3 多基准站定位系统
移动站GPS接收机天线接收GPS卫星信号送至GPS接收机,GPS接收机利用来自GPS天线的信号及来自无线通信系统的基准站数据完成RTK解算。实时提供机车的位置、速度与时间信息。由于基准站GPS接收机有多台同时工作,所以,移动站GPS接收机必须自动识别来自不同的基准站接收机的数据。
列车跟踪与定位系统的核心是车载部分的列车定位处理单元。该单元接收从连续信息处理(车载GPS接收机)、点式信息处理(应答器车载单元)、测速测距信息处理(测速测距模块)、参数输入装置(线路数据存储器)传来的信息,实时计算列车运行的位置、速度等相关数据。位置、速度、时间的计算以车载GPS接收机输出的DGPS信息(RTK解算值)为主要依据,当列车途经隧道或GPS信号遮挡区段时辅以点式应答器和测速测距信息,比照线路数据存储器内置的实际线路的相关信息,包括线路的坡度、换相点、隧道、桥梁和公里标、区间轨道号、站内股道号,以及图定区间运行时间、目标速度、目标距离和车站停靠时间等进行多重冗余校核运算,将计算的结果-列车的实际运行时刻(精确时间)、位置(相对位置)和速度,以及与图定运行时间和速度的误差,经由车载数据阅读/发送器传输给地面系统。
3.2 试验数据统计分析
基于上述设计原则,我们构建了相应的试验系统,并在京山线及京承线试验,取得了大量实测数据,为对方案的认可及进一步改进系统性能提供了依据。试验中,我们采取了不同方式的定位技术,得到相应的数据,并对试验数据进行分析和比较,得到适合现代铁路具体应用的方案。表1为京山线的数据分析统计表。

表1 京山线数据分析统计表
3.3 性能比较
目前,德国铁路采用列车线性定位技术实现列车跟踪与定位,LZB控制中心是根据列车位置计算制动距离的,尤其是在高速条件下,位置与速度测量的精度决定了列车运行的安全程度,定位精度可达到10m。JR东日本正在开发的新一代列车控制系统ATACS(Advanced Train Administration and Communications System),试验结果表明其定位精度的误差最大为0.26%,平均误差为0.18%。美国PTS系统是基于中央控制模式的移动闭塞系统,其车载计算机必须连续不断计算列车制动距离,同时可以在只有2颗卫星的条件下达到1.68 m定位精度。国内一项列车定位与速度检测技术源于由列车运行记录器发展起来的列车运行监控装置,列车运行监控装置的工作原理是利用机车信号信息、里程计信息和存储的线路数据相结合,通过一定的软件处理,实现列车在一个区间或一个轨道电路区段内的连续定位。由于系统不具备车对地的信息传输通道,因此,无法直接用于
现代铁路的列车运行控制系统和列车跟踪与定位系统。此外,在秦沈客运专线工程中开展了“GPS安全报警系统”,监控台的计算机通过相邻2列车位置的计算找到它们间的距离,按设计的要求2列车相距3 km发出预警信号;2列车相距2 km发出紧急报警信号。参照该实验系统的实测数据,限差都在1m以内,如果进一步改进通信信道质量,定位精度还有进一步提升的空间。
4 结束语
根据具体试验数据和统计结果,结合具体试验条件以及试验当时通信线路以及周边环境等限制条件的影响,我们可以得到以下结论:在卫星信号较好并且进一步提升铁路无线通信信道性能的条件下,能够保证差分链路的连续有效性,GPS的定位可以正常达到L1_FLOAT状态,再配合专门的软件处理,铁路机车采用该种方式进行监控是完全可行的,该方案对于中国铁路列车跟踪监控水平的发展具有一定参考意义。
[1] 张 勤. 全球定位系统(GPS)测量原理与应用[DB/OL].Http://dcxy.chd.edu.cn/jpkc/gpsyl/up/GPS6.pdf.
