桥式起重机抗扰动跟踪控制器的设计
2011-04-27杨斌刘惠康代文蕤
杨斌,刘惠康,代文蕤
(1.成都理工大学 工程技术学院,四川 乐山 614007;2.武汉科技大学 信息科学与工程学院,湖北 武汉 430080;3.武钢冷轧硅钢片厂 吊车车间,湖北 武汉 430080)
桥式起重机抗扰动跟踪控制器的设计
杨斌1,刘惠康2,代文蕤3
(1.成都理工大学 工程技术学院,四川 乐山 614007;2.武汉科技大学 信息科学与工程学院,湖北 武汉 430080;3.武钢冷轧硅钢片厂 吊车车间,湖北 武汉 430080)
桥式起重机作为一种现代搬运机械,广泛应用于现代车间、仓库、港口码头装卸等国民经济的各个领域,然而要对桥式起重机的吊物位置和吊物的摆幅进行精确控制是相当困难的。提出并设计了一种基于伺服补偿器和镇定补偿器的抗扰动跟踪控制器,实现了桥式起重机的精确定位和消除吊物的游摆。仿真和试验结果表明,这种抗扰动跟踪控制器完全能够满足桥式起重机安全地执行装卸任务,实现无人职守的自动化操作。
抗扰动跟踪控制器;拉格朗日方程;极点配置;伺服补偿器;镇定补偿器
1 引言
桥式起重机在冶金工业中主要承担着空中搬运、成品或半成品的地点转移、以及日常主要生产设备的大修、中修或小修等工作任务。由于起重机在运行过程中,吊物因惯性或受到外部干扰(如:大、小车的加减速、启动和停车、风力)等影响,会使得吊物离开原有的平衡位置产生很大的摆动。这种摆动不仅使得吊物的装卸难以定位,降低了生产效率,而且还对周围的吊装人员和设备带来严重的安全隐患。本文采用了伺服补偿器和镇定补偿器的极点配置技术构造一抗扰动跟踪控制器,以实现吊物的精确定位和消除游摆。
2 小车运动系统的数学建模
2.1 拉格朗日方程建模
在分析系统和设计系统的控制规律以前,我们首先必须建立起系统的数学模型。一般地,要获得桥式起重机在三维空间中的模型是比较困难的。为了化简问题,我们可以暂时只考虑小车这一个运动平面,并认为大车、小车和卷扬的升降运动是相对独立的,即:大车、小车及卷扬的运动不会同时进行。基于以上的假设,可以绘制出桥式起重机工作示意图如图1所示。图1中已经对桥式起重机小车运动系统在x-o-y平面上进行了受力分析。其中F是小车所受的牵引力,N为小车所受轨道支持力,Mg为小车重力,mg为吊物的重力,l为钢丝绳的长度,θ为吊物在小车运动过程中产生的偏角。

图1 桥式起重机工作示意图Fig.1 Overhead crane working diagram
设吊物在x-o-y平面内的坐标为(x1,y1);运动小车的位移为x,于是有:

对方程组(1)中的变量x1和y1求取一阶导数得:

系统的动能T由两部分组成,即小车运动过程中所具有的动能和吊物所具有的动能,故:

根据分析力学中的拉格朗日方程

其中,Fx,Fθ为系统在广义坐标x和θ下的广义力。在忽略摩擦阻力的情况下将式(3)代入方程组(4)可以获得如下方程组:

式中:,分别为小车运动加速度和吊物偏角加速度。
解关于和的线性方程组(5)得:

由方程组(6)得到小车运动系统的状态方程为
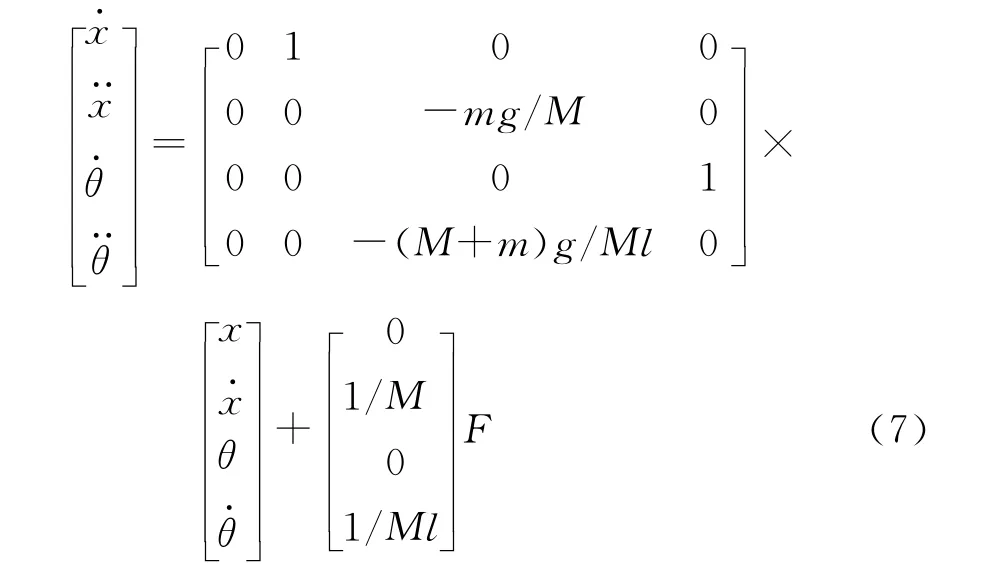
2.2 小车运动系统的状态空间表达式
现在以QD型10t双梁桥式起重机的具体参数为据建立小车运动系统的数学模型。小车质量M为3.36t;吊物质量m为5t;钢丝绳摆长l为10m;重力加速度g为9.8N/kg。将上述物理量代入方程组(7)并考虑输出方程可得如下状态空间表达式:

式中:u=F为小车的牵引力。
3 抗扰动跟踪控制器的设计
3.1 控制系统的结构
小车运动控制问题实际上是一个跟踪控制问题,其控制目标是保证系统的输出量无静差地跟踪外部给定的参考信号yr。为了实现在控制量u的作用下,控制系统稳定且具有满意的动态性能,根据状态反馈控制和内模控制原理以及桥式起重机运动特点和控制要求,能够构造如下抗扰动跟踪控制器。其结构原理如图2所示。
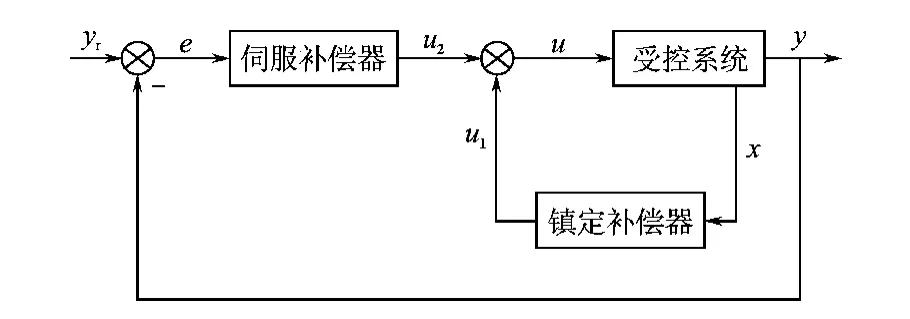
图2 抗扰动跟踪控制系统结构原理Fig.2 Anti-disturbance tracking control system principle
3.2 伺服补偿器和镇定补偿器的设计
图2所示的u1为状态反馈,是镇定补偿器所产生的控制作用。它将使得系统稳定且具有满意的动态性能;而伺服补偿器产生的控制作用u2实现输出y对给定参考信号yr的跟踪,以确保小车高精度地停留在所给定的水平位置上。以下将介绍这两种补偿器的设计步骤。
1)判别是否dimu≥dimy,其中dimu和dimy分别为受控系统的输入和输出量的维数。这里u为p维控制向量,y为q维输出向量。本问题有n=4、p=q=1,所以dimu=dimy,满足判别条件要求。
2)判别系统的能控性。事实上由线性定常连续系统状态完全能控的充分必要条件可以判定该系统的能控性矩阵是满秩的,因此系统状态完全能控。
3)在本问题中,我们不考虑扰动信号,而yr是阶跃函数,其特征多项式为s,且为不稳定的,所以不稳定部分的最小公倍式为φ(s)=s;于是可以确定出伺服补偿器的模型为

4)对于φ(s)的每个根λi判别是否满足以下关系式:

以确定系统是否能够实现抗扰动渐近跟踪控制。这里φ(s)=s=0的根λ=0,于是有:
满足判别条件4),所以该系统能够实现抗扰动渐近跟踪控制。
5)写出该系统的渐近跟踪状态方程

代入数据后得:
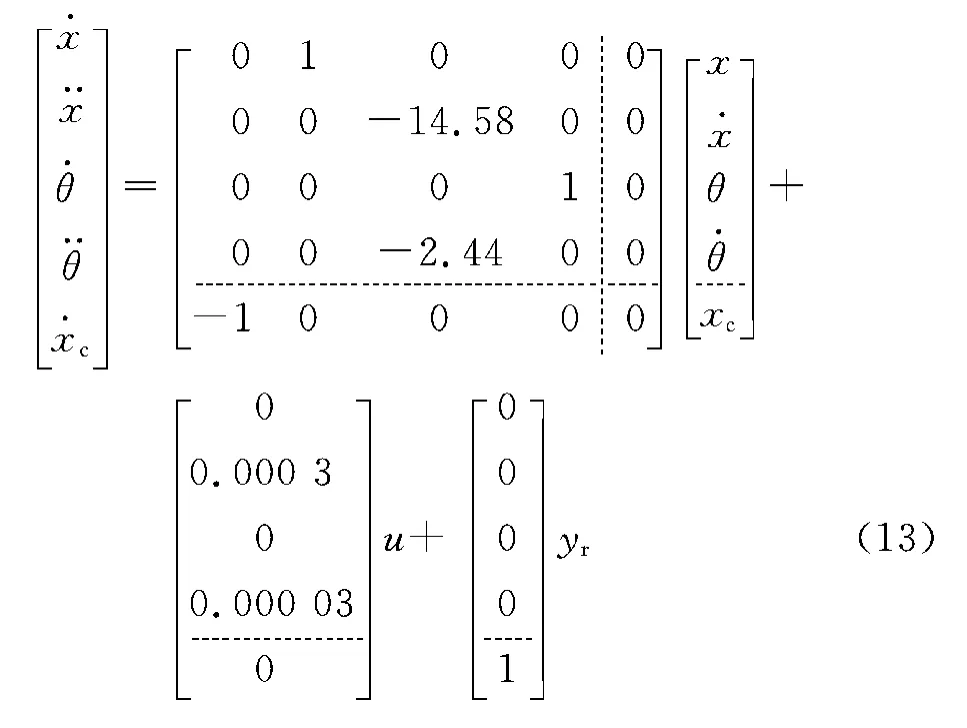
6)选择5个使上述系统稳定的闭环极点为

7)最后可得渐近跟踪系统的状态反馈控制规律u为

于是可以求得状态反馈矩阵:

通过以上的分析计算可得伺服补偿器为

镇定补偿器为

应用Simulink对系统的动态过程进行仿真,其仿真结果如图3所示。

图3 基于伺服补偿器和镇定补偿器的跟踪控制Fig.3 Tracking control based on servo-compensator and stabilization compensator
上述仿真结果说明:桥式起重机小车控制系统在吊物的初始摆角θ=0.1rad时,从初始值2 m的地方运动到终止值8m的地方,小车能够在18s内运动到终值,并且位移和摆角均不会产生超调。位移和摆角不产生超调说明了抗扰动跟踪控制器能够使得小车精确地停车并有效地消除吊钩的游摆。从控制系统的结构上看,其伺服补偿器为一个一阶的积分环节,它的控制作用能有效地消除外部信号为阶跃函数时的静态误差。
4 基于DSP控制器的系统实现
图4是桥式起重机消摆控制系统的结构原理图。其中DSP控制器采用TI公司的TMS320F2182专用电机控制芯片。它将用来实现前述的基于伺服补偿器和镇定补偿器的抗扰动跟踪控制算法及空间矢量脉冲宽度调制算法。前者解决控制规律的问题,后者则根据前者的计算结果实现对三相异步电动机的矢量控制。从对QD型10t双梁桥式起重机的试验结果看,基于伺服补偿器和镇定补偿器的抗扰动跟踪控制算法能够使得小车运动系统准确地停车,并且有效地消除吊钩的游摆。试验结果如表1所示。表1中的手动操作数据由一名具有高级技术等级的吊车司机在重复操作10次后得出。
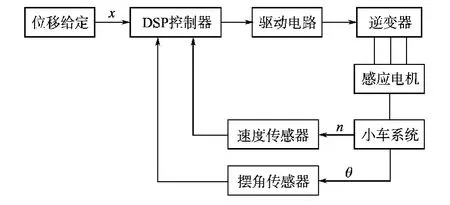
图4 消摆控制系统的实现结构图Fig.4 Block diagram of an anti-sway control systematic realization
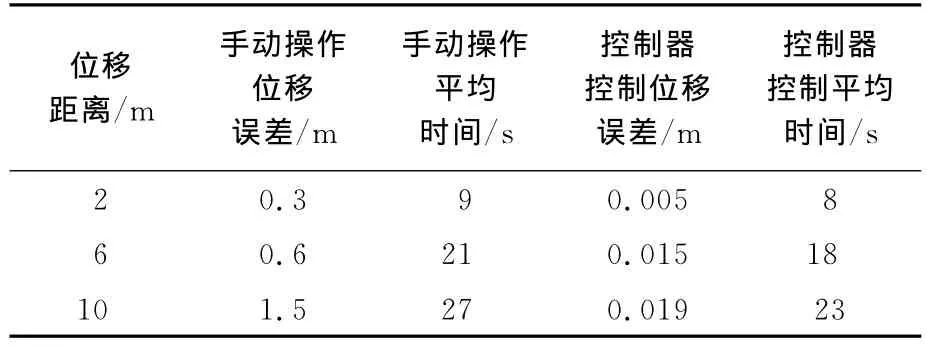
表1 手动操作数据与试验数据对照表Tab.1 The table of comparison between manual operation data and test data
5 结论
桥式起重机被广泛地应用于冶金工业的各个领域,其钩头或吊物的精确定位和消除停车后钩头或吊物的游摆对提高生产效率、解放劳动力有着深远的意义。本文提出了应用伺服补偿器和镇定补偿器的极点配置技术去设计桥式起重机的抗扰动跟踪控制器,其仿真和试验结果表明这种控制方案可以获得满意的控制效果,能够安全、快速地实现桥式起重机的定位和消除吊物的游摆,且算法简单易于在桥式起重机上实现。
[1] Li Maoqing.Controller Design for 2-DOF under Actuated Mechanical Systems Based on Controlled Lagrangians and Application to the Acrobot Control[J].Frontiers of Electrical and Electronic Engineering in China,2009,4(4):417-439.
[2] Nenad Muskinja,Boris Tovornik.Swing Up and Stabilization of a Real Inverted Pendulum[J].IEEE Trans.on Industrial Electronics,2006,53(2):631-639.
[3] Han B,Lin X G.Adapt Steady State Kalman Gain Using the Normalized Autocorrelation of Innovations[J].IEEE Signal Processing Letters,2005,12(11):780-783.
[4] Hou M.Controllability and Elimination of Impulsive Modes in Descriptor Systems[J].IEEE Trans.on Automatic Control,2004,49(10):1723-1727.
[5] Masoud Z N,Nayfeh A H,AI-Mousa A.Delayed Positionfeedback Controller for the Reduction of Payload Pendulations of Rotary Cranes[J].Journal of Vibration and Control,2003,9(3-4):257-277.
[6] Omar H M,Nayfeh A H.Gain Scheduling Feedback Control for Tower Cranes[J].Journal of Vibration and Control,2003,9(3-4):399-4l8.
[7] Al-mousa A,Nayfeh A H,Kachroo P.Control of Rotary Cranes Using Fuzzy Logic[J].Shock and Vibration,2003,10(2):81-95.
[8] Jin Ho SUH,Jin Woo Lee,Young Jin Lee.Antisway Control of an ATC Using NN Predictive PID Control[C]∥Proceedings of the 30th Annual Conference of the IEEE Industrial Electronics Society,Busan,Korea,2004,3:2998-3003.
[9] Kang G B,Kim Y B,An S B.A New Approach to Antisway System Design for a Container Crane[C]∥Proceedings of SICE Annum Conference,Fukui:SICE Press,2003:2289-2291.
[10]曾昭龙,田凯,李文秀.舰载特种起重机轨迹跟踪吊重防摆控制[J].哈尔滨工程大学学报,2005,26(4):457-461.
[11]董明晓,郑康平,张明勤.桥式起重机消摆控制仿真研究[J].系统仿真学报,2005,17(6):1459-1461.
[12]陈雪松,王东文,王伟辉.一种基于TMS320F2812设计的低压交流伺服驱动器[J].冶金自动化,2007,31(5):52-54.
修改稿日期:2010-11-10
Anti-disturbance Tracking Controller′s Design of the Overhead Crane
YANG Bin1,LIU Hui-kang2,DAI Wen-rui3
(1.EngineeringandTechnicalCollege,ChengduUniversityofTechnology,Leshan614007,Sichuan,China;2.CollegeofInformationScienceandEngineering,WuhanUniversity ofScienceandTechnology,Wuhan430080,Hubei,China;3.CraneShop,Wugang ColdRolledSiliconSheetsMill,Wuhan430080,Hubei,China)
Overhead crane as a modern transportation machinery is widely used in modern workshop,storehouse,portdock and the various branches of the national economy.However,it is difficult to effectively eliminate pendulum and accurately fix position of crab.An anti-disturbance tracking controller based on servo-compensator and stabilization compensator for eliminating pendulum and accurately fixing position was put forward and designed.Simulation and experiment results show that the anti-disturbance tracking controller can meet overhead crane to safely accomplish hoisting work,and can realize automation and unmanned operation.
anti-disturbance tracking controller;Lagrange equation;pole placement;servo-compensator;stabilization compensator
TP273;TH215
A
杨斌(1976-),男,硕士研究生,讲师,Email:yangbin1976@126.com
2010-09-08
