基于广义Hough变换的航迹关联算法
2011-04-26汤子跃段树森曾剑新
张 斌,汤子跃,段树森,曾剑新
(1.空军雷达学院,武汉 430019;2.解放军93251部队,齐齐哈尔 161000)
0 引 言
航迹与航迹的关联是用于确定几个不同传感器的航迹来自同一个目标,通常应用在分布式信息处理系统中,来解决传感器空间覆盖区域中的重复跟踪问题,因而,航迹关联过程也称为去重复。统计航迹关联法和模糊航迹关联法是现有的两大类航迹关联方法。统计法在目标密集,分叉或分岔航迹较多,机动目标较多,系统包含有较大的导航、传感器校准及转换和延迟误差的场合下,要判断来自2个局部节点的航迹是否属于同一个目标是很困难的,错误关联较多,有时甚至不能满足要求;模糊法的最大缺点是系统参数设置复杂,精确性和快速性难以同时满足。
1962年,P.V.C.Hough根据数学对偶性原理提出了检测图像直线的方法,现已发展成为一种应用较为成熟的图像边缘检测技术,具有良好的抗噪声性能。1981年,D.H.Ballard提出了非解析任意形状的R表法,有效地将Hough变换推广到对非解析的任意形状的识别,被称为广义Hough变换法(GH T)。
徐毓教授在文献[5]~[7]中把Hough变换成功引入到雷达数据关联领域,取得了较好的实验效果。本文在前人基础上,探讨了基于广义Hough变换的航迹关联算法,并通过仿真试验,证明了该方法的有效性。
1 基本原理
在所需检测的曲线或目标轮廓没有或不易用解析式表达时,可以利用表格来建立曲线或轮廓与参考点间的关系,从而继续利用Hough变换进行检测,这就是广义Hough变换的基本原理。
这里的参考表格就是所说的R表,是参考点与曲线轮廓点的对应关系,避免了使用解析式,如图1所示。先在所给轮廓内部取一个参考点(p,q),对任意一个轮廓点(x,y),令从(x,y)到(p,q)的矢量为r,r与X轴正向夹角为φ,做出过轮廓点(x,y)的切线和法线,令法线与X轴正向的梯度角为θ,使r和φ都是θ的函数,从而使每个轮廓点在参考点(p,q)下都对应着一个梯度角,但是,一个梯度角可能对应多个轮廓点,对应点的数量与轮廓形状和θ的量化间隔Δθ有关。
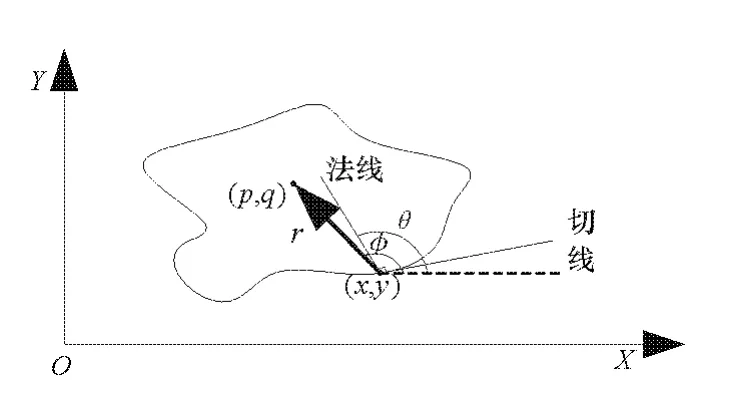
图1 参考点和轮廓点的对应关系图
2 算法步骤
(1)把目标航迹时空统一后,显示成灰度图,分别定为模板图和目标图。
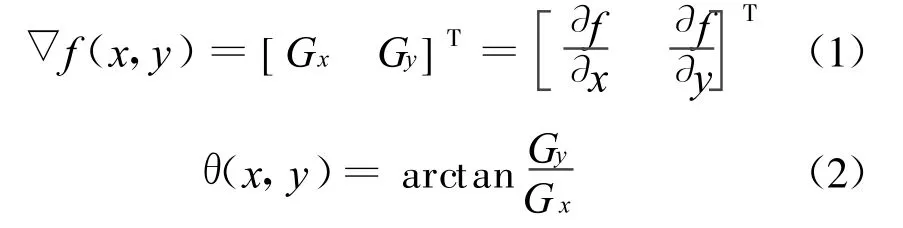
(2)求梯度角θ,梯度算子比较常用的有Prewitt算子和Sobel算子,其中后者效果较好,应用最广泛,本文亦采用这种算子求梯度的沿X方向的导数Gx和沿Y方向的导数Gy,进而求梯度角θ(x,y)如下:
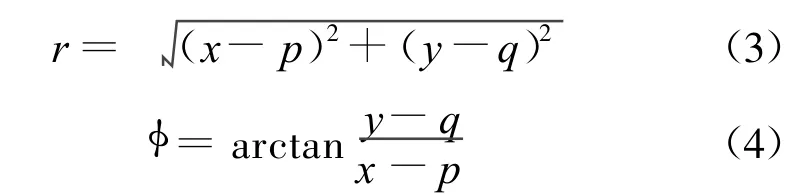
(3)求模板图上每个轮廓点到参考点(p,q)的距离r和r与X轴正向的夹角φ:
(4)根据r,φ与θ的关系,做出一个参考表,如表1所示。其中θ为目录,r和φ为内容,M为梯度角θ的个数,N为航迹点数。
(5)对目标图中的每个灰度为1的点(可能存在的轮廓和一系列杂波点)求梯度角同步骤(2),并以此值检索参考表,通过下式求得


(6)A中的最大值即是目标图中存在的待检轮廓的参考点,接下来整个轮廓的位置以及形状就可以确定了。
表1 参考表
3 仿真结果分析
采用Matlab进行200次蒙特卡洛仿真实验,验证算法有效性。假设传感器A和传感器B的过程噪声υ(k)和测量噪声 ω(k)都服从高斯分布,且相互独立。其中,传感器A的过程噪声υA(k)~N(0,25),测量噪声 ωA(k)~N(0,100);传感器B的过程噪声υB(k)~N(0,30),测量噪声 ωB(k)~N(0,200)。图2和图3分别是来自不同的传感器A和B的航迹,图中直线为匀速直线运动目标的航迹,曲线是机动目标的航迹。
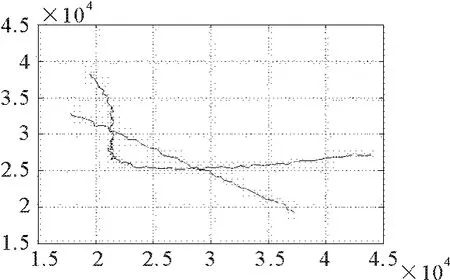
图2 来自传感器A的航迹
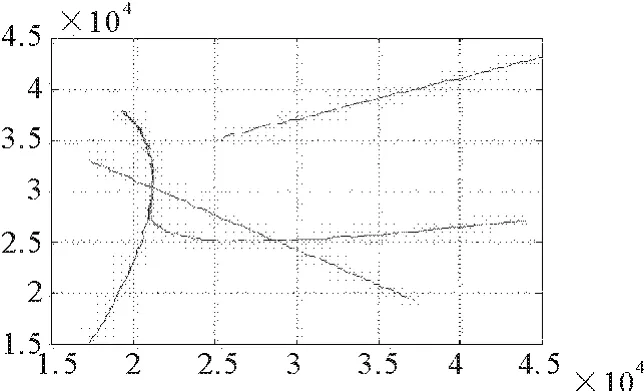
图3 来自传感器B的航迹
图4是由传感器A航迹制成的模板二值灰度图,图5由传感器B航迹制成的目标二值灰度图。
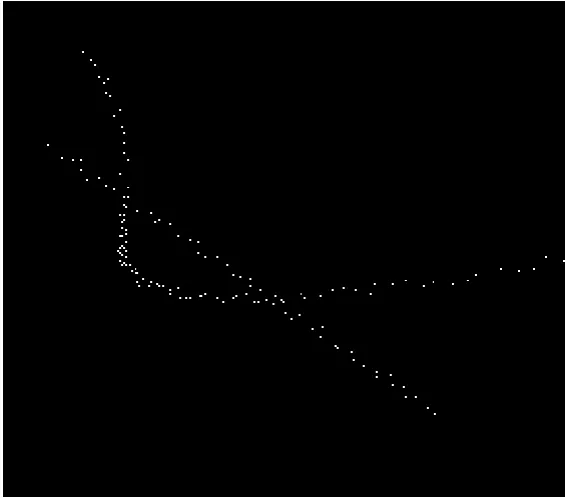
图4 模板图
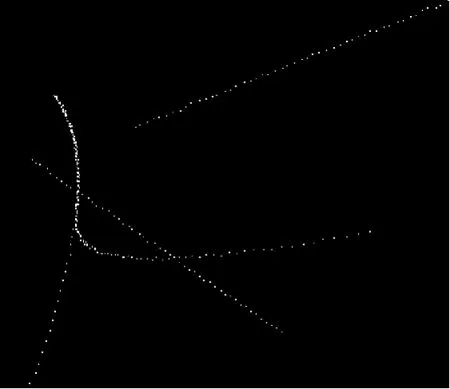
图5 目标图
图6是变换到GH T参数空间的累加器显示图,图7是变换到GH T参数空间的累加器三维显示图,图8为航迹融合图。
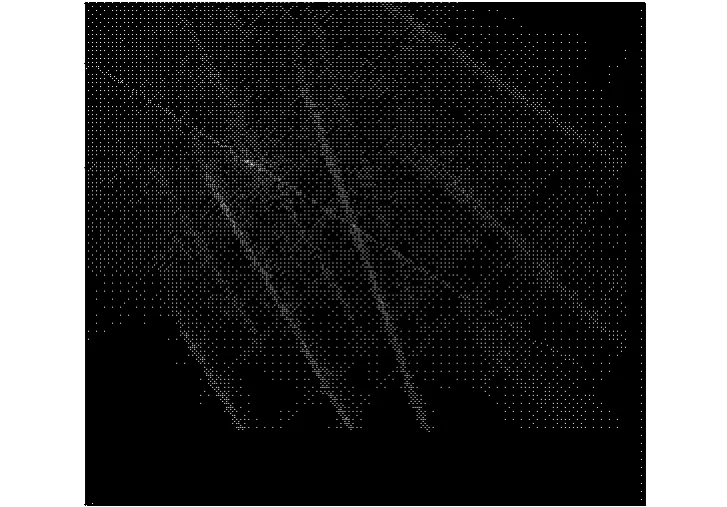
图6 参数空间显示
4 结束语
本文研究了广义Hough变换在航迹关联中的应用问题。利用广义Hough变换的特性,仿真实现了不规则曲线航迹的关联,并对影响关联效果的因素进行了分析。
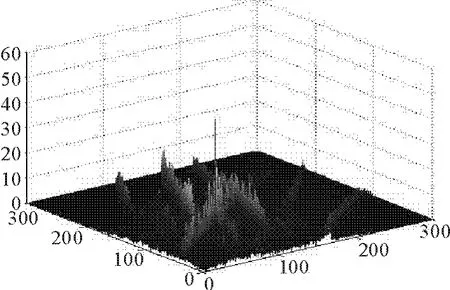
图7 参数空间的三维显示
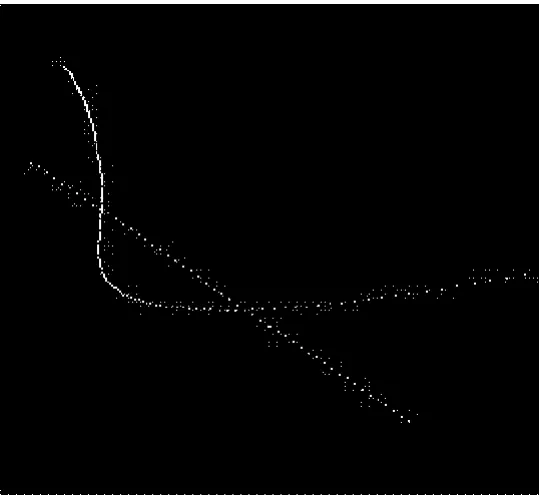
图8 航迹融合图
下一步,可从正确关联概率、错误关联概率、漏关联概率等角度与其它算法进行对比研究;在提高算法的适时性和鲁棒性方面探索改进算法。
[1] 侯雪梅,胡飞.多传感器多目标航迹关联算法研究[D].西安:西北工业大学,2006.
[2] 何友,王国宏,陆大钅金,等.多传感器信息融合及应用[M].北京:电子工业出版社,2000.
[3] 章毓晋.图像工程[M].北京:清华大学出版社,2005.
[4] 徐毓,杨瑞娟,李锋.Hough变换与数据融合[J].现代雷达,2001,23(6):16-18.
[5] 徐毓,叶斌.HOUGH变换与航迹关联[J].火力与指挥控制,2002,27(4):12-14.
[6] 张萍,徐毓,张楠,等.基于 Hough变换的航迹关联算法[J].计算机测量与控制,2006,14(1):98-99.
[7] 姚立健,丁为民,赵三琴,等.广义Hough变换在遮挡图像识别中的应用[J].农业工程学报,2008,24(12):97-101.