基于模型的舰船目标回波模拟算法的设计与实现
2011-04-26邵云生
邵云生
(海军驻上海地区水声导航系统军事代表室,上海 200083)
0 引 言
在自动目标识别(ATR)系统中,判断特征提取是否有效,采集大量数据十分重要。但实际应用中,直接采集各种舰船在各种海况和航向角下的回波数据十分困难。目前国外进行ATR研究以模拟数据为主。由于获取目标在各种环境下的回波数据、经费支撑和协调方面的问题难以解决,即使通过采集手段,也只能获取本国目标数据;因此,现阶段的数据获取手段主要还是计算机模拟。本文根据电磁波几何绕射理论,设计了一套基于模型的目标回波模拟算法,建立了雷达传感器模型、舰船目标模型、雷达电磁波发射模型,克服了直接采集目标回波数据的困难,节省了大量费用。
1 模型及算法设计
1.1 雷达传感器模型
常规雷达的主要战技指标有:最大探测距离、脉宽L(D)、重频f、波瓣宽度τ、天线转速 ω、天线扫描方式、波长。
1.2 舰船目标模型
将目标俯视图分割成若干长方形单元,每个单元大小为d1×d2,如图1所示,参数d1、d2可依雷达波长和脉冲宽度的不同而适当选择。
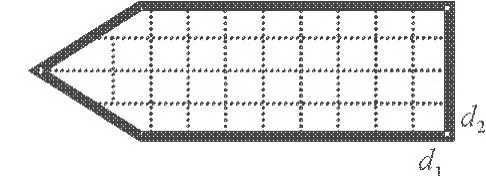
图1 目标俯视图
将每个单元作为一个反射中心,根据电磁波几何绕射理论,则其对脉冲(δ函数)的发射为:

式中:t为脉冲达到时间;p为电磁波照射方向上排布的目标的第p个反射中心。
1.3 雷达电磁波反射模型
将雷达波瓣在水平方向上的角度τ等分为n份,则可以看成波束有n+1个方向。如果以pi表示波束在第i个方向上的增益,当目标距雷达很远,电磁波可视为平面波,回波强度是同方向的矢量迭加。以D(t)表示雷达脉冲,则雷达的发射信号为:





图2 k=0时雷达脉冲照射目标示意图
当波束后沿与舰尾相切时,波束前沿所在的位置是k=n+c,如图3所示,所以有:
式中:i为波束中照到目标的所有方向;Ei(t)为第i个方向上脉冲照射到目标后的后向反射波。

图3 k=c时雷达脉冲照射目标示意图
假设在第i个方向上有p(i)个反射中心,其位置为tp,如图 4所示。
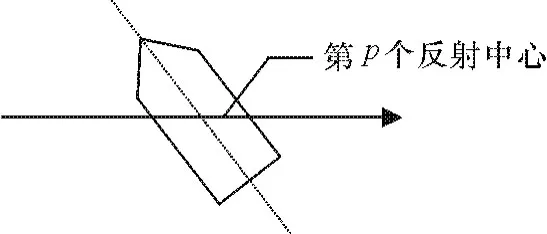
图4 目标反射中心示意图
则用理想脉冲照射目标时,回波为:

实际上,雷达发射的信号并不是理想的δ函数,而是有一定宽度L(D)的矩形脉冲。在模拟中,可以选其它形式的脉冲代替δ函数(比如高斯型脉冲),脉冲的形状参数可以依照雷达波长和脉宽而适当选设。
Ei(t)的展宽为:


图5 雷达波束照射目标示意图
如图5所示,由公式(4),雷达波束中功率方向线的序号i由前沿0开始到n+c为止,而目标径向宽度L(D)中的序号i从舰首i=0开始顺序增大至舰尾c,则有3种情况顺序出现:
(1)当雷达波束进入目标,但未完全覆盖目标时:

(2)当目标完全被波束覆盖时,c≤k≤n。

(3)当波束前沿已退出目标,但后沿尚未退出:

综合上面这3种情况,用如下矩阵来统一表示:

根据公式(10)得到雷达天线收到的回波值,根据公式(6)所确定的目标展宽信息,可以模拟出雷达收到的目标回波视频信号。
1.4 模拟数据中需要考虑的因素
在模拟中还有许多因素需要考虑:首先是关于n值的选择。根据前面的约定,知道{yk(t)}nk=0表示的是从天线波束前沿接触目标起,转过τ角所得到的n个回波。由于转过这个角度所用的时间为τ/ω,假设f为脉冲的重复频率,所以在这段时间内共发射n个脉冲。由于雷达天线也应该收到同样数量的回波,则:

因此,从波束前沿接触目标起,到波束后沿完全退出目标为止,一共应该得到n+c个回波,且回波之间的规律如图6所示。

图6 目标回波示意图
第2个需要考虑的因素就是关于距离的限制。假设目标的方向角为θ,则目标的视角为lcosθ/R。c的计算公式为:


1.5 算法流程
算法流程:
(1)生成雷达波束功率Pi;
(2)根据目标俯视轮廓图生成反射参数α;
(3)计算目标后向散射波形;
(4)计算雷达天线接收目标波形;
(5)根据约定的信噪比计算噪声;
(6)将噪声叠加到原始波形上。
2 算法实现中的几个问题
2.1 对目标回波展宽的模拟
在上述推导中,假设雷达发出的信号是一个脉冲。但实际上,雷达发出的信号并不是理想的δ函数,而是有一定宽度L(D)的矩形信号,所以在第i个方向上,实际上从目标表面后向反射的信号应为如下的卷积:

式中:*号表示卷积,其展宽为:

当雷达脉冲照射到目标并返回之后,由于会发生延拓,因此天线收到的回波的展宽也会发生变化。
雷达脉冲前沿刚接触到目标时为0时刻,如图7(a)所示。
从0时刻开始,雷达脉冲分为2个部分:一部分从脉冲前沿接触到目标左弦开始发生反射,而另一部分则继续前进。当到达zi时刻时(zi为目标宽度所折合成的时间跨度),继续前进的那部分脉冲前沿刚好到达目标右弦,如图7(b)所示。
当到达L(D)时刻(L(D)为雷达脉冲宽度),继续前进的脉冲后沿刚好到达目标左弦。这时,反射波的最前沿距目标左弦的宽度为L(D),如图7(c)所示。
当到达L(D)+zi时刻时,继续前进的脉冲后沿刚好达到目标右弦。这时,脉冲即将离开目标,如图7(d)所示。
当到达L(D)+z1+zi时刻时,反射的脉冲后沿刚好到达目标左弦,整个反射脉冲即将全部离开目标,如图7(e)所示。

图7 雷达脉冲入射反射时序关系示意图
雷达收到的目标回波的宽度,就是从雷达发射的脉冲前沿接触目标左弦反射开始,到整个反射脉冲离开目标为止。
2.2 对理想脉冲的改造
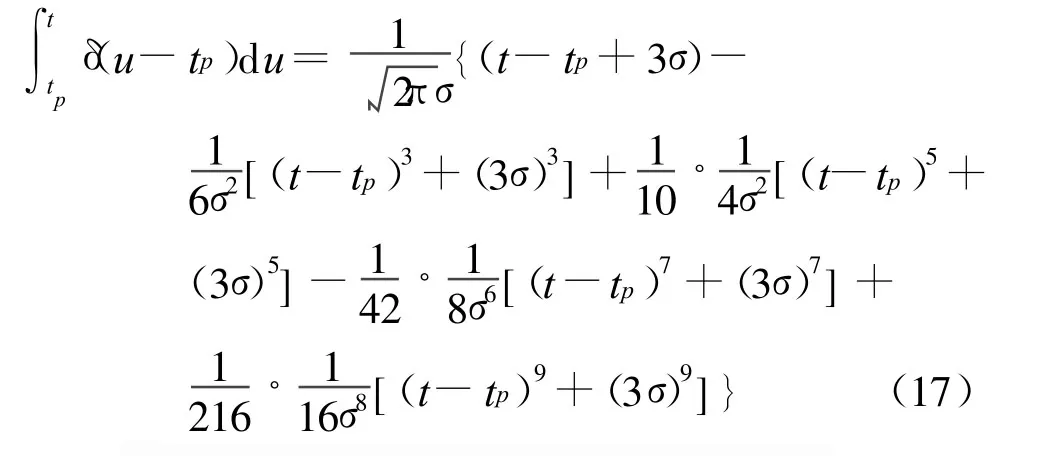
在公式(4)的推导中,理论上认为雷达发射的是理想脉冲,而在实际中,雷达发射的信号并非是理想脉冲信号,而是有一定宽度的,在软件模拟中也无法实现理想脉冲。因此,选取高斯脉冲来代替公式中的理想脉冲,高斯脉冲的表达式为:

在模拟中先对高斯脉冲进行泰勒级数变换,再对变化之后的表达式进行抽样,经过泰勒展开之后为:

对该高斯脉冲的积分为:
对该高斯脉冲的微分为:

3 结束语
本文根据电磁波的几何绕射理论,设计了基于模型的雷达舰船目标回波模拟算法。用这种方法产生的模拟数据有较好的理论基础,避免了实测工作中的许多困难,比如经费问题、协调问题、保密问题等。由于在实际采集中,无法知道当时的信噪比值,对整个自动识别系统在各种信噪比下的识别率难以统计,因此模拟数据方法有不可替代的作用。在对目标自动识别的研究中,大量数据是最基本的前提条件,模拟数据和实测数据都是不可缺少的,逼真的模拟数据能够弥补实际数据采集不足,大量的实测数据又是验证系统可用性的有力证明,二者缺一不可。
[1] 黎湘,郁文贤,郭桂蓉.一种基于回波序列的舰船目标识别方法[J].现代雷达,1997,19(1):1-6.
[2] 姜秋喜,黄建冲.一种雷达信号波形的精确测量技术[J].舰船电子对抗,2006,29(4):16-17.
[3] 王晓华.雷达信号脉内时频分析的一种新方法[J].舰船电子对抗,2006,29(6):67-69.
