三维激光扫描技术应用于建筑物建模的测量方法研究
2011-04-18黄承亮向娟
黄承亮,向娟
(1.重庆市勘测院,重庆 400020;2.国家测绘局重庆测绘院,重庆 400015)
三维激光扫描技术应用于建筑物建模的测量方法研究
黄承亮1∗,向娟2
(1.重庆市勘测院,重庆 400020;2.国家测绘局重庆测绘院,重庆 400015)
三维激光扫描技术是当前一种新技术,其应用领域广泛。提出三维激光扫描技术在建筑物模型建设中的应用方法,分别以不同类型的建筑物为例,研究了其具体测量方案,并对相关参数设置进行分析,通过实验该方法取得了较好的结果。
三维激光扫描技术;三维建模;精度
1 引 言
三维激光扫描技术是国际上近期发展的一项高新技术。利用三维激光扫描技术,可以深入到复杂的现场环境及空间进行扫描操作,并可以直接实现各种大型的、复杂的、不规则、标准或非标准的实体或实景三维数据完整的采集,进而快速重构出实体目标的三维模型及线、面、体、空间等各种制图数据[1]。当前这一技术主要用于工程测量、地形测景、虚拟现实和模拟可视化、矿区土方开挖断面和体积测量、工业制造、变形测量、加工检测、施工量测、事故调查、历史古迹的调查与恢复,以及特殊动画效果的测量等[2,3]。但在建筑物变形监测方面的研究比较少,本文主要研究了运用三维激光扫描技术对建筑物建模的观测方法。
在对建筑物进行建模应用中,三维激光扫描技术与传统的测量技术相比有其特点和优势[4]。三维激光扫描技术能快速完整的获取建筑物的三维信息,并能够方便有效的生成建筑物的三维模型。由于三维激光扫描技术获取的是三维点云数据,因此能充分体现出建筑物的特征信息。通过对建筑物进行整体扫描能为后续的数据处理提供丰富的源数据。由于三维激光扫描技术的独特特点,因此在进行建模时采用的方法也与传统的方法有所差别,并且对不同类型建筑物的观测方法也不一样。虽然三维激光扫描仪的绝对精度并不高,但通过点云数据得到的建筑物模型数据的精度较高,同时两次扫描之间的相对精度也较高,因此可以从这方面入手进行观测方案的设计。这里就分别对简单建筑物和复杂建筑物的监测方法进行讨论。
2 简单建筑物的建模观测方法
简单建筑物定义为如图1所示建筑物,其建筑结构简单,没有复杂的表面并且单体独立,建模精度要求不高。在对这类简单建筑物运用Trimble GX200三维激光扫描仪进行模型建立时在满足测量精度要求的情况下主要考虑两个方面的问题:一是尽可能提高测量精度;二是尽可能提高测量的效率。

图1 简单建筑物示意图

图2 复杂建筑物示意图
2.1 控制网布设方法
应用三维激光扫描仪对建筑物进行建模首先要进行观测控制网的布设。根据三维激光扫描仪的扫描特点及观测控制网的布设要求,提出三维激光扫描仪对简单建筑物变形监测控制网的布设原则为:
(1)控制网的精度要高于建筑物建模要求的精度。
(2)控制网布设的网型合适,能满足三维激光扫描仪完全获取建筑物数据的要求。
(3)控制网中各相邻控制点之间通视良好,要求一个控制点至少与两个控制点通视。
(4)为了提高测量精度,要求控制点与被测建筑物之间的距离保持在50 m以内。根据以上原则,对简单建筑物设计了两种控制网布设方案,如图3和图4所示。

图3 控制网布设方案一
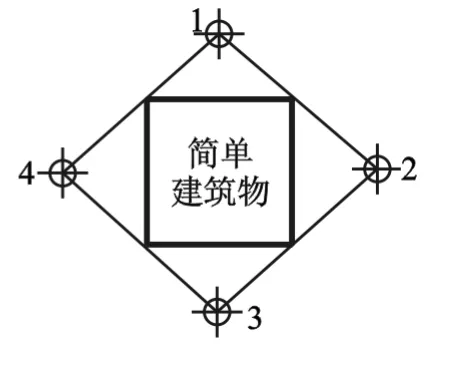
图4 控制网布设方案二
两种布设方案中,方案一适用于当建筑物长宽较大时,一次扫描不能得到一面墙体较好的扫描效果时采用。这种布设方法能使扫描仪在每个控制点上都能扫描到两面墙体,当四个控制点完全扫描完以后,每面墙体被扫描两次,就增加了点云的密度,从而提高了建模的精度。方案二适用于建筑物长宽不大并且长宽比较小时。这样布设控制网可以使每个控制点完全扫描一个墙体的数据,并且效果好,同时也节约时间提高工作效率。通过分析,当定向边与被测物体的夹角越小时,其扫描得到的点精度越高,从方案二可以看出,定向方向(后视方向)与被测墙体的夹角基本在45°以内,因此这样得到的墙体扫描数据具有较高的精度。
在控制网布设完毕后,应采用高精度的全站仪进行坐标测量,获得控制网各点的坐标,保证控制网的精度高于被测建筑物要求的精度一个等级。当两个控制点之间的距离大于100 m时,由于三维激光扫描仪的扫描精度随距离的增加而降低,因此需要在两控制点之间增加一个控制点,使各控制点间的距离小于100 m,保证三维激光扫描仪的测量精度。
2.2 扫描观测方法
在控制网建立完成后,就可以把三维激光扫描仪架设在各个控制点上对被测建筑物进行扫描,获取点云数据。具体测量步骤为:
(1)在某一控制点上架设三维激光扫描仪,并把仪器进行精确地对中整平,连接各种数据线和电源线,使三维激光扫描仪与控制终端(笔记本电脑)保持通讯。
(2)在相邻控制点上架设仪器标靶,作为后视定向点,并对标靶进行精确地对中整平。保持相邻两控制点之间的距离小于100 m,以距离为50 m最佳。
(3)启动三维激光扫描仪和笔记本电脑中的相应控制软件。首先操作电脑控制三维激光扫描仪对相邻控制点上的标靶进行瞄准扫描,获取定向边数据;后视定向完成后,控制三维激光扫描仪对被测建筑物进行扫描,得到建筑物的部分点云数据。在每个控制点上重复这一过程进行扫描,直到获得全部点云数据。
(4)对得到的建筑物点云数据进行检查,查找是否有遗漏或扫描效果不好的区域,如果存在需要进行及时的修补扫描或进行点云加密扫描,最后确证获得完成可靠的数据。到此建筑物建模外业数据采集工作结束,转入内业数据处理。
在整个三维激光扫描仪数据采集过程中,需要对三维激光扫描仪的相应参数进行设置,每个参数的设置都会对扫描过程和扫描结果产生一定的影响。对结构简单的建筑物进行扫描时,主要考虑扫描数据精度和扫描效率。因此需要对各个参数设置进行分析,达到高效率、高精度的扫描结果。
(1)点云间隔设置:三维激光扫描仪扫描物体得到的数据称为点云数据,点云数据是由大量的离散点构成。这些离散点并不是无规则的排列在一起,而是按照一定的行列间隔有序排列。三维激光扫描仪在对物体进行扫描时,需要进行点云间隔的设置。对于建筑物而言,点云间隔设置不同得到的扫描结果也有差别。当点云间隔设置较大时,扫描速度快,花费时间少,得到的点云数据稀疏密度小;当点云间隔设置较小时,扫描速度慢,花费时间多,得到的点云数据密集密度大。速度快时间少在野外工作时可以节约用电量,进行更多的扫描工作;点云密度大可以更好地反映建筑物的细节特征,有利于模型的建立。因此合理的设置很重要。
以图1建筑物为例,采用两种不同的点云间隔设置进行扫描,一种采用点云间隔为10 mm,另一种采用点云间隔为30 mm,分别得到图5和图6的扫描结果。

图5 点云间隔10 mm数据
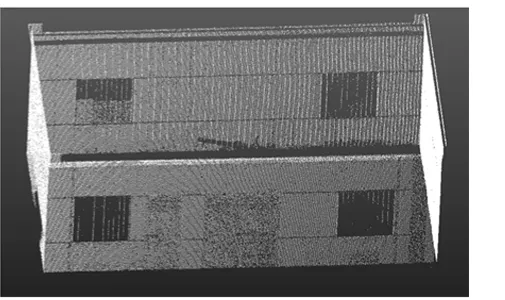
图6 点云间隔30 mm数据
从图5和图6可见,当点云间隔为10 mm时得到的建筑物点云数据密度大,数据质量好,能较好的反映建筑物的特征信息;当点云间隔为30 mm时得到的建筑物点云数据密度较小,数据质量与间隔为10 mm的数据相比稍差,但能完整反映建筑物的整体信息。
应用Geomagic Studio 8数据处理软件对两种数据建立表面模型,如图7和图8所示。从建立的表面模型可以看出,两个种点云间隔得到的建筑物表面模型基本一样,都能反映出建筑物的整体轮廓整体。说明两种点云间隔设置对于结构简单的建筑物建立表面模型,在整体上都能较好反映物体特征。图9和图10是两种表面模型在同一位置截取的细节轮廓图。在细节表现上点云间隔10 mm的表面模型比点云间隔30 mm的表面模型效果好。但点云间隔30 mm的表面模型也能完全反映细节特征,对于结构简单的建筑物而言,可以满足模型建立的要求。

图7 点云间隔10 mm表面模型

图8 点云间隔30 mm表面模型

图9 点云间隔10 mm

图10 点云间隔30 mm
对如图1所示的简单建筑物进行4个测站扫描过程中,以10 mm的点云间隔进行扫描总共用时26 min,以30 mm的点云间隔进行扫描总共用时8 min。在扫描效率上,点云间隔30 mm扫描是点云间隔10 mm扫描的3倍,这样就极大地增加了扫描时间。
因此,对于结构简单的建筑物在满足建模精度要求的前提下,可以采用30 mm~40 mm点云间隔的设置进行扫描,这样既能得到精度较高,质量较好的扫描数据,同时又能提高扫描的效率,达到既快又好的扫描结果。
(2)扫描次数设置:Trimble GX200三维激光扫描仪对物体进行扫描时,具有在同一测站点上对物体进行多次扫描的功能,扫描次数的范围为1次~4次。扫描次数设置越高,得到的点云数据越密集,点云密度越大,效果越好,但同时扫描速度降低,扫描时间延长。
通过试验分析以及运用三维激光扫描进行测量积累的经验得出,对于简单建筑物,在合适的点云间隔设置下,采用1次~2次扫描次数就可以满足测量的要求,并能得到较好的效果。采用更多的扫描次数,对于提高扫描数据的质量没有明显的效果。
(3)精细扫描设置:精细扫描是指对建筑物某一区域进行高密度的扫描,以获取该区域的高清晰点云数据。这种扫描方式应用于结构复杂,精度要求高或者细节特征明显的区域。对于简单的建筑物,由于其结构并不复杂,精度要求也不高,因此不需要进行精细扫描。
3 复杂建筑物的建模观测方法
复杂建筑物定义为大型的、外形结构特征复杂的、多体组合的建筑物,如图2所示建筑物。对复杂建筑物进行建模时,要求精度高属于高精度精密测量,因此运用Trimble GX200三维激光扫描仪对复杂建筑物进行模型建立时,主要以测量结果达到其要求的精度指标为依据,进行相应测量方案的设计,具体设计方案如下。
3.1 控制网布设方法
复杂建筑物建立模型的精度要求较高,因此其观测控制网的布设十分重要,控制网的精度高低直接决定最终模型的精度。根据三维激光扫描仪的扫描特点及观测控制网的布设要求,提出对复杂建筑物建模观测控制网的布设原则为:
(1)观测控制网建设精度高于复杂建筑物模型要求精度一个等级。
(2)控制网各控制点平面坐标采用高精度全站仪实施导线测量,高程采用精密水准测量方法,并进行严格的平差计算。
(3)控制网网型合适,满足三维激光扫描仪完整获取建筑物数据的要求。对部分结构复杂的区域,应加密变形监测控制点使扫描时能更好地获得扫描数据。
(4)控制网中各相邻控制点之间通视良好,要求一个控制点至少与两个控制点通视。
(5)为了提高测量精度,要求控制点与被测建筑物之间的距离保持在50 m以内或更近的距离。
根据以上原则,对如图11所示的复杂建筑物设计了一种控制网布设方案,如图11所示。

图11 复杂建筑控制网布设方案
这种控制网布设方案中,1号~16号控制点为基础控制点,17号~22号控制点为加密控制点。基础控制点布设作用主要是保证能完整获取建筑物的点云数据信息;加密控制点主要是针对建筑物部分区域结构复杂,需要进行局部精细扫描反映建筑物细节特征布设的。加密控制点的布设原则主要根据建筑物的复杂特征和变形监测要求的精度,加密控制点和基础控制点的测量精度相同。
3.2 变形监测方法
运用Trimble GX200三维激光扫描仪对复杂建筑物进行观测的方法与对简单建筑物进行观测的方法基本一样。由于对复杂建筑物进行建模精度要求高,因此在各个测量环节上都应做到精确无误,保持测量结果具有较高的精度。
对复杂建筑物进行数据采集过程中,也需要对三维激光扫描仪的相应参数进行设置。与对简单建筑物进行扫描时参数设置不同,对复杂建筑物进行数据采集时,主要考虑扫描数据的质量和扫描结果的精度,下面对相关参数设置进行讨论。
(1)点云间隔设置:由于复杂建筑物的结构特征复杂、细节轮廓多,如果采用较大的点云间隔设置进行扫描,可能无法完整的得到建筑物的点云数据,对于一些细节特征可能会造成显示不清楚或丢失的情况。因此在对复杂建筑物进行扫描时应采用10 mm~20 mm设置,并保证能完整反映建筑物最小细节特征的点云间隔。
(2)扫描次数设置:在前面介绍过Trimble GX200三维激光扫描仪对物体进行扫描时,可以对扫描次数进行设置,其范围为1次~4次。扫描次数设置越高,得到的点云数据越密集,点云密度越大,效果越好。
对于复杂建筑物,在合适的点云间隔设置下,应该采用3次~4次扫描次数,达到点云加密的效果,这样可以获得高质量的扫描结果,才能满足复杂建筑物建模精度的要求。
(3)精细扫描设置:精细扫描是指对建筑物某一区域进行高密度的扫描,以获取该区域的高清晰点云数据。对于复杂建筑物有时需要获取局部细节特征,但采用常规的扫描设置无法有效的得到其特征,因此可以采用精细扫描方式进行扫描。这种扫描设置可以满足某些特殊效果的需要,如图12所示。

图12 精细扫描效果图
图12 左图是对建筑物进行扫描并对其局部特征进行5 mm~10 mm扫描,右图是局部放大的效果图。可以看出精细扫描可以明显的反映出建筑物的细节特征,达到高质量的扫描效果。
(4)关键点扫描设置:在建筑物的特征点或关键位置,可以采用设置扫描标靶,对标靶进行独立扫描获取该特征点的信息。这种特征点的扫描方法可以获取高精度的建筑物的关键区域或特征点。
4 结 语
三维激光扫描仪用于建筑物建模的技术目前还处于研究的阶段,文本提出了三维激光扫描仪应用于建筑物模型建立的观测方法。分别对简单建筑物和复杂建筑物的工作方法进行讨论,提出了各自的测量原则和标准,对其控制网布设方法和具体观测方法也进行了研究。
[1] 马立广.地面三维激光扫描测量技术研究[D].武汉:武汉大学,2005
[2] 毛方儒,王磊.三维激光扫描测量技术[J].宇航计测技术,2005,25(2):1~6
[3] 张国辉.基于三维激光扫描仪的变形监测[J].中国科技论文在线
[4] 李秋,秦永智,李宏英.激光三维扫描技术在矿区地表沉陷监测中的应用研究[J].煤炭工程,2006,4:97~99
Study on The Measurement Method of 3D Laser Scanning Technique on Model Building
Huang ChengLiang1,Xiang Juan2
(1.Chongqing Survey Institute,Chongqing 400020,China;2.Chongqing Institute Of Survey And Mapping,Chongqing 400015,China)
As a new technology,3D Laser Scanning is being wildly used in many fields.This paper demonstrates how to apply the technology to Model building,Different types of buildings are an example,research the specific measurement method and analysis the parameters setting.The scanner reaches a nice result in this experiment.
3D laser scanning technique;3D modeling;precision
1672-8262(2011)01-87-04
P234.4
B
2010—03—29
黄承亮(1984—),男,助理工程师,现主要从事工程测量和三维激光扫描技术研究工作。
