无人机载双相机低空遥感系统应用初探
2011-04-18吴正鹏
吴正鹏
(天津市测绘院,天津 300381)
无人机载双相机低空遥感系统应用初探
吴正鹏∗
(天津市测绘院,天津 300381)
无人飞行器与航空摄影测量的结合促成了摄影测量与遥感的新发展方向——无人飞行器低空航空摄影测量。本文结合天津市测绘院组织的无人机航空摄影测量试验,首先介绍了无人机载双相机低空遥感系统的组成,然后就其数据处理流程及几何处理进行了详细分析,最后对该系统的应用前景进行了展望。
无人机;双相机;低空遥感;空中三角测量
1 引 言
尽管近年来卫星遥感、包括高分辨率卫星遥感已经取得长足发展,但由于卫星遥感平台受轨道的限制,每天过顶的时间固定且受天气影响较大,无法满足应急观测需要;航空遥感虽然具有自主性强、机动灵活等特点,但是在恶劣的天气条件下,出于安全考虑,载人飞机往往无法升空作业,亦无法响应应急观测需要;微波遥感等手段虽然不受云和天气的影响,可实现全天时、全天候对地观测,但由于探测原理的差异,并不能替代可见光和红外遥感在实际应用中的地位。
伴随着无人飞行器(UAV)的发展,近年来无人飞行器将其自身特点与航空摄影测量结合,成为摄影测量与遥感的新平台被引入测绘行业,形成一个新的发展方向:无人飞行器低空航空摄影测量。与前述几类遥感平台相比,低空遥感平台具有以下几个独特的优势:①平台构建容易、维护成本极低;②受天气的影响较小,作业方式机动灵活;③飞行高度低,能够获得大比例尺高精度影像,在局部信息获取方面有巨大优势;④不受重访周期限制,可在云下飞行,能有效避免云的影响,获取高时间分辨率影像;⑤能够获取高重叠度的影像,增强了后续处理的可靠性;⑥受空域限制较小。此外,无人机遥感平台还具有便于携带,转移方便等优点。鉴于以上诸多优势,基于小型无人机平台搭建的对地观测系统已经成为世界各国争相研究的热点课题,现已逐步从研究开发阶段发展到实际应用阶段。
当前,国家测绘局已经明确将“数字航空摄影、无人驾驶飞行器低空遥感影像等先进的影像获取技术用于测绘生产”列入了测绘系统工作要点。2010年4月,天津市测绘院订购了CK-GY04型无人机载双相机低空遥感系统并于2010年4月23日在天津市静海县团泊镇进行了试飞。本文将结合试验情况,对无人机载双相机低空遥感系统的关键技术及应用进行简单介绍。
2 无人机载双相机低空遥感系统的组成及技术参数简介
无人机低空航测系统与一般的大型航空遥感系统的组成基本相同,由飞行平台、动力系统、飞行控制系统、遥感传感器以及遥感数据处理软件系统组成。
2.1 CK-GY04型无人机飞行平台
CK-GY04型无人机飞行平台参数如表1所示。

CK-GY04型无人机设计参数 表1

图1 CK-GY04型无人机弹射起飞和开伞降落
2.2 动力系统
动力系统由动力装置与螺旋桨组成,提供飞机起飞、降落以及空中抗风、完成飞行任务所需要的动力。
2.3 飞行控制系统
飞机飞行控制系统由地面遥控和机载自主控制两大部分组成。飞机的升空过程控制和回收过程控制由地面作业人员通过地面控制中心进行遥控控制,飞机到达预定高度后的定点控制通过机载自主控制系统进行,并可以在上述两种控制方式之间进行切换。飞机机载自主控制系统由感知飞机状态的传感器、实施数据处理和执行控制功能的计算机、操纵舵面运动的伺服作动系统、无线电遥控收发装置、机内自测试(BIT)等分系统组成。飞行控制系统及方案原理如图2所示。

图2 飞控系统及方案原理图
地面遥控系统主要由无线电遥控收发装置、地面中心控制计算机、地面遥控工作台等部分组成,如图3所示。

图3 地面遥控系统
2.4 遥感设备(传感器)及航摄规划系统
(1)遥感设备(传感器)具有特宽角的组合双相机系统(LAC02),其结构如图4所示。该设计能满足无人机载航空遥感器轻小型化(重量不超过5 kg)及高程精度的要求。
特宽角相机的拼接是将多个单相机采用外场拼接的方式进行拼接。最理想化的双相机拼接模型为两相机的投影中心完全重合,如图5所示,S为投影中心,SO1和SO2为两相机的主光轴。

图4 组合特宽角双相机系统结构图(LAC02)

图5 理想双相机拼接模型
图5 的拼接为理想的拼接方式,采用内视场拼接方式时才有可能实现此种拼接方式,但内视场拼接方式的难度在于多块CCD的接连处理及分光镜的安装。目前国内外航空相机主要的拼接方式是外视场拼接,如DMC相机采用外视场拼接方式,UltraCamD相机内外视场两种拼接方式均采用了。外视场拼接就是利用现有成型单相机(包括相机后背和镜头)进行拼接,由于每个相机机械尺寸不一致,因此两相机的投影中心s1和s2不重合。外视场拼接有内倾式和外倾式两种拼接方式,内倾式是两个相机镜头均向内倾斜,如图6所示;外倾式是两个相机镜头均向外倾斜,如图7所示。

图6 带有重叠度的外视场拼接模型(内倾式)
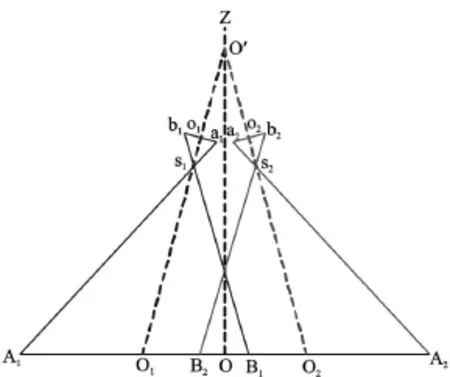
图7 带有重叠度的外视场拼接模型(外倾式)
无论采取内倾式还是外倾式拼接,从原理上都是一样的,都要保持两个相机的主光轴的倾角是一样的,也就是∠O1O′O2保持不变。组合特宽角相机LAC02的具体参数如表2所示,LAC所获取影像的地面分辨率与飞机航高之间的对应关系如表3所示。

LAC02传感器技术参数 表2

LAC02影像与航高之间关系 表3
(2)航摄规划系统
航摄规划系统是规划实现任务要求的技术指标,顺利完成航空摄影测量任务的关键。无人机遥感监测系统采用非量测数码相机进行航空摄影,因此无人机的航摄规划系统也与普通有人飞机不同。普通有人飞机的航摄系统一般是有人值守系统,而无人机的航摄规划系统是无人值守的系统,需要通过遥控指令控制相机曝光。无人机的航摄规划系统分为航线设计子系统、航线上传子系统、航点数据下载子系统三个部分,系统框图如图8所示。

图8 航线规划系统图
3 无人机遥感数据处理流程
与传统航空摄影数据相比,无人机遥感数据具有以下几个特点:①由于采用了非量测数码相机,镜头畸变较传统航摄仪大;②低空宽视角,因视点变化的原因,影像四周地物几何变形大,特征匹配难度大,有效匹配率低;③低空、宽像幅且高重叠度,影像数据量大;④虽采取了一定防范措施,但是仍免不了出现大的旋偏角,超出传统航测±8°的规范要求[1]。因此,无人机遥感数据的处理在某些环节中有其特殊的地方,但总的来说,其流程与传统航空摄影测量数据处理基本一致。即相机检校、批处理文件制作、全自动影像匹配、定向点检查、空三解算、DEM生成、DOM生成几个步骤,如图9所示。

图9 无人机遥感数据处理流程
4 无人机低空遥感影像几何处理试验
4.1 飞行情况简介
2010年4月下旬,CK-GY04无人机载双相机低空遥感系统在天津市静海县团泊镇飞行,获取了近8 km2(约400张)的航空摄影数据。航摄当天,当地的风力在5级在左右,通过检查双相拼接(如图10所示)结果,发现该系统所获取的像片在像片重叠、倾斜角、旋偏角及航线弯曲度、航高保持等方面都能满足内业数据处理要求。

图10 双相拼接示意图
4.2 外业像控点及检查点测量情况
根据航空摄影数据检查结果,选取地物信息相对丰富的区域作为开展空中三角测量及地形图测绘的试验样区,包括4条航线,每条航线32张航片,总面积约3 km2,如图11所示。像控点布设方案采用区域网布点法,按照航向2条~3条基线、旁向1条航线的跨度共布设平高控制点32个;同时,在地物集中的居民区布设69个检查点供地形图测绘精度评价使用;像控点及检查点分布如图12所示。
像控点及检查点的平面与高程均采用网络RTK测量方法,直接测量像控点的WGS-84坐标,并依据要求将WGS-84大地坐标换算至天津90地方坐标系。具体参考如下要求:①卫星高度角≥15°;②有效观测卫星数≥5;③数据采样时间3 min;④点位几何图形强度(PDOP值)≤6。

图11 试验区航摄覆盖图

图12 像控点、检查点分布示意图
4.3 区域网空中三角测量
利用无人机载双相机低空遥感系统获取的数码影像进行地面目标量测所能达到的精度是该系统实用化的关键技术指标之一;同时,也直接影响到该系统的应用推广。此次采用外业采集的30个控制点分三种方案进行区域网空中三角测量精度测试,其精度统计情况如表4所示。

区域网空中三角测量精度汇总表 表4
通过对不同方案区域网空中三角测量结果的分析,我们认为每平方千米布设6个像控点即可满足成图要求。同时,无人机低空遥感数据的区域网空中三角测量有以下特点:①由于低空遥感影像的航向重叠度一般为80%,旁向重叠度约60%,空中三角测量时,每个地面点对应的像点观测值较传统摄影测量大大增加,而冗余观测值的增加不仅可以提高整体平差的精度,而且非常有利于粗差观测值的探测和剔除。②相对定向和自由网空中三角测量中误差较大。经检查发现,中误差较大并不是由同名点存在粗差引起的,而是由于配置的24 mm广角镜头存在很大的畸变差所致。故在相对定向和自由网空中三角测量前,先进行像点坐标畸变改正,则自由网平差的中误差会迅速提高。③由于像控点采用的是地面自然特征点,因而区域网平差精度会受到像控点对应像点坐标量测误差的影响。采用明显人工标志作为像控点的区域网平差精度应该会有较大提高。
另外,如果在无人机上安装高精度的GPS接收机,并在飞行过程中记录GPS观测数据,则有可能像传统航空摄影测量一样进行GPS辅助空中三角测量,从而大大减少地面控制点的数量,进一步提高低空遥感影像数据的处理效率。
4.4 正射影像图(DOM)制作
本文利用区域网平差后的空中三角测量结果重建模型采集特征点、特征线内插生成测区的DTM,进而制作对应的正射影像。通过量测像控点及检查点(地面点)在正射影像上的平面坐标,并与已知坐标比对,可以对正射影像进行精度检查。经检查发现,像控点(地面点)的平面位置中误差约0.3 m,说明所生成的正射影像精度较为理想。不过由于没有经过匀光及调色处理,正射影像存在明显的色彩不一致现象,可以采用专业后处理软件进行处理。
4.5 立体测图
在立体环境中,读取像控点及检查点的坐标并与外业测量值进行比对,其精度统计情况如表5所示。

立体测图精度统计表 表5
通过分析立体测图误差分布情况,我们发现一倍中误差以内的点约占总点数的70%,两倍中误差以内97%,仅有3%的点位误差超过了两倍中误差,而最大误差均小于三倍中误差,说明立体测图结果不存在粗差。同时,由于没有经过系统误差改正,立体测图中的点位精度与空中三角测量精度相差较大,尤其是相邻像对及航线间的高程误差较大,经过系统误差改正,平面精度及高程精度会有较大提高。因此,无人机载双相机低空遥感系统能满足1∶2 000、1∶1 000或更大比例尺地形图测绘要求。
5 应用展望
近年来,城市建设与规划、国土资源监测、精确农业、自然灾害期间空间信息数据的实时获取以及灾情评估与灾后重建等对大比例尺数据的要求日益迫切。上述行业的应用不仅要求影像数据具有更高空间分辨率,有的更要求其具有高时间分辨率。例如,城市建设监测与农作物生长监测中通常需要按月获取数据;国土资源监测要求分季度提交数据;而对于突发的灾情则需要快速反应,及时获取信息,实时把握灾情状况,快速、正确地做出救灾抗灾之决策。同时,在一些自然灾害(地震、洪灾等)发生时进行的测绘活动,因环境恶劣,不仅要考虑仪器设备的安全,更要考虑人员的安全,如果用传统的遥感与有人飞机航空拍摄,将极难实现或因耗费过高而产出极低。无人飞行器低空航空摄影测量系统的出现则为我们提供了高空间、时间分辨率遥感数据获取的新思路。随着无人飞行器低空航空摄影测量系统在抗风能力、姿态稳定度、续航时间等方面的提高及其与高精度GPS集成的实现,该系统将成为高空间、时间分辨率遥感数据获取的可靠手段。
[1] 张永军.基于无人驾驶飞艇的低空遥感影像几何处理.武汉大学学报·信息科学版,2009(3)
[2] 李英成,赵继成,丁晓波.超轻型飞机低空数码遥感系统用于土地资源信息获取.遥感应用,2005(4)
[3] 彭晓东,林宗坚.无人飞艇低空航测系统.测绘科学,2009 (7)
[4] 姬渊,秦志远,王秉杰等.小型无人机遥感平台在摄影测量中的应用研究.测绘技术装备,2008(1)
Primary Study on Application of UAV Low-Altitude Remote Sensing System with Dual-camera
Wu ZhengPeng
(Tianjin Institute of Surveying and Mapping,Tianjin 300381,China)
The combination of UAV and aerial photogrammetry contributed to new development direction of Photogrammetry&remote sensing—UAV low-altitude aerial photogrammetry.In this article,the component of UAV low-altitude remote sensing system with dual-camera and the detailed analysis of data processing workflow are introduced as well as geometry processing based on the UAV aerial photogrammetry test organized by Tianjin Institute of Surveying and Mapping.Finally,the future application of the system is forecasted.
UAV;Dual-Camera;Low-Altitude Remote Sensing;Aerotriangulation
1672-8262(2011)01-76-05
P231
B
2010—09—03
吴正鹏(1981—),男,工程师,主要从事摄影测量与遥感的数据处理、应用研究与管理工作。
