BM弹头雷达一维像干扰初探*
2011-04-14陈方予崔晓东李明赵蕾
陈方予,崔晓东,李明,赵蕾
(1.中国航天科工集团公司8511研究所,江苏南京 210007;2.江苏省教育考试院,江苏南京 210024)
0 引言
弹道导弹(BM)的发展使得其防御技术引起广泛关注。前期BM使用电子单点多假目标干扰机和球形轻诱饵,干扰制导雷达对真实弹头目标回波信号的检测和识别,对此反导雷达则增大探测信号带宽,取得一维探测距离上的高分辨力,对目标进行距离维成像,根据先前得到的弹头雷达一维距离像(HRRP)特征,识别和剔除在HRRP上与弹头有明显差别的电子点假目标信号和球形诱饵回波信号,并根据弹头章动时前鼻锥处散射信号的微特征,对目标回波信号进行细微分析,剔除那些不具有相应微多普勒特征和距离徙动特征的假目标信号。
具有高一维距离分辨力的宽带雷达通常有二维成像能力,但BM弹头在弹道中段距探测雷达较远,难以在雷达几秒钟的观察时间内产生较大的转角(在C波段,通常需要3°左右的转角才能与距离维匹配),较难形成方位维的高分辨,另外BM弹头章动对回波包络对齐产生较大影响[1],难以构成二维成像条件。虽然利用BM弹头的HRRP进行目标识别存在随姿态角变化的缺点,但HRRP算法简单,容易实现,被反导雷达广泛使用[2]。
线性调频信号是宽带雷达成像常使用的探测信号形式,本文讨论对宽带雷达使用线性调频信号形成的BM弹头HRRP的干扰方法。
1 宽带雷达成像原理
宽带成像雷达通常有窄带和宽带2种工作模式(有的还有中等带宽模式),窄带模式用于对目标搜索和跟踪,宽带模式用于对目标成像,对应的信号处理方法是匹配滤波[3]和全去斜率脉压处理方法(stretch)[4]。匹配滤波是在时域上检测目标,而stretch(简称全去斜)是通过FFT生成一维像,可看成是在频域上检测目标。图1,2是2种信号处理方法的示意图[5]。

图1 雷达窄带工作时目标检测原理Fig.1 Radar check target when operating in narrowband model
图1中,s(t)为目标回波信号,s(t)经FFT后得到s(k),s*(k)为雷达发射信号经FFT后的复共轭函数。将s(k)与s*(k)相乘再做IFFT,经D/A平滑后得到s1(t),s1(t)与s(t)幅度相比,获得压缩增益G=T/Δt=TB(B为雷达中频带宽)。
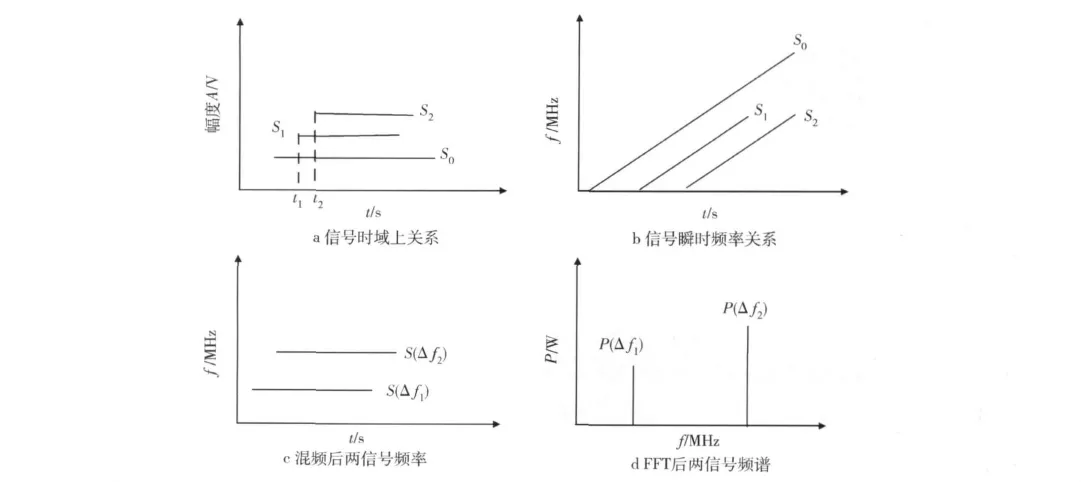
图2 使用全去斜技术检测目标回波信号原理Fig.2 Detecting target echo signal using stretch
图2中,S1,S2为雷达发射宽带信号时2个点目标回波信号,到达雷达接收机时间分别为t1,t2;S0为雷达接收机本振信号,调制规律与发射信号相同。S1,S2与S0混频后取差频,得到2个单音基频脉冲信号 S(Δf1),S(Δf2)。对 S(Δf1),S(Δf2)作 FFT,得到2信号功率谱P(Δf1)和P(Δf2)(图2d中为简化起见画成了单根谱线,实际是外包络为辛格函数(sin x/x)的多根谱线),根据P(Δf1)和 P(Δf2)的幅度得到信号S1,S2的功率。
用 S(Δf1),S(Δf2)信号载频频差 Δf=Δf1-Δf2乘上调频斜率,得到2信号到达时差t1-t2=Δf·(T/Bw)(T为发射信号脉宽,Bw为发射线性调频信号最大调制频偏),对应两目标之间距离ΔL=(t1-t2)c/2(c为光速)。
脉宽为T的信号经FFT后,得到的谱线间距为Δf=1/T,根据信号线性调频斜率(T/Bw),得到信号到达时间分辨率Δt和目标距离分辨率δ,Δt=Δf·(T/Bw)=1/Bw,δ=Δt(c/2)=c/(2Bw)。
2 BM弹头雷达一维像
雷达对BM弹头进行一维成像时,弹头已不能被看成是一个点目标,用于衡量点目标特征的窄带低分辨雷达(LRR)的目标RCS(σLRR)已不能完全反映弹头的HRRP特征,需要使用宽带高分辨雷达(HRR)的目标RCS(σHRR)参数进行描述。
σHRR是一项新内容,理论上不十分完善。描述σHRR的理论基础是等效散射中心理论[6]。等效散射中心理论是在理论分析中产生的,没有严格数学证明,但通过实际测量,不仅能够观测到多散射中心的几何分布,而且这些多散射中心的矢量合成散射场与目标总雷达散射截面理论计算得到的总散射场和雷达散射截面有较好的一致性,在实践上说明了多散射中心理论的正确性。根据多散射中心理论,每个散射中心都相当于斯特拉顿-朱(Stratton-chu)积分中的一个数字不连续处。从几何观点来分析,就是目标物体的表面曲率不连续处和材料不连续处[7]。
一个相对雷达径向长度为L的圆锥形弹头(如图3a所示),雷达前向观察时,弹头HRRP通常如图3b所示[8]。其中前点为弹头鼻锥产生的尖顶散射,后点为弹头后边缘产生的边缘散射,中间点为弹体的镜面散射,下面的连续区为弱散射区。前后2个强散射点因几何结构不连续产生,中间镜面散射点位置因观测角度不同而不同,多数情况下其幅度相对前后2个强散射点较小,属于弱散射点,有时甚至没有,中间弱散射区一般总有。

图3 圆锥形弹头前向HRRPFig.3 Cone-shaped warhead HRRP in forward
通常BM弹头的RCS值以窄带低分辨力雷达(LRR)的RCS值σLRR给出。弹头在采取隐身措施情况下,σLRR值通常在0.01~0.1 m2量级范围。对于一个主要由2个强散射点构成的弹头HRRP,如果能够得到2个强散射点的宽带高分辨雷达的RCS,σHRR1和 σHRR2,则其窄带低分辨雷达的 RCS,可表示为

式中:d1,d2为σHRR1,σHRR2到等效散射中心的距离;λ为雷达探测信号波长。
式(1)的逆过程一般没有解析解,即根据σLRR难以得到 σHRR1和 σHRR2,这容易理解,因为只知道σLRR是难以推算出物体几何形状的。
BM弹头使用自旋防止整体横向翻滚。弹头自旋受到扰动引起锥旋,锥旋受到扰动表现为章动[9]。弹头以质心为参考点章动,在HRRP上会引入前鼻锥点散射信号的幅度闪烁、距离徙动和微多普勒频率调制[10]。
3 BM弹头雷达一维像干扰
宽带成像雷达对目标成像观测时为了得到宽带本振信号的参考延时,需要宽、窄带交替工作,由此,对雷达窄带工作模式进行遮盖式干扰是有意义的,如果遮盖距离足够长,能够遮盖位于遮盖信号前沿后远于雷达成像窗口宽度距离处的BM弹头,则即使雷达能以噪声遮盖信号前沿为参考进行成像观测,也有可能看不到成像窗口后面的弹头。
对BM弹头HRRP的干扰方法理论上也分为有源和无源的示假和遮盖。箔条类干扰丝在真空中难以散开,轻质气球数量受弹载条件限制难以实现大量,无源遮盖的方法目前实施难度较大;轻质仿形诱饵沿东西向飞行时空间二次自定姿困难,无源示假的方法在一定程度上也受到限制。目前工程上比较容易实现的方法是有源示假和遮盖,即使用电子干扰机发射假目标信号和遮盖信号,干扰雷达获取BM弹头的HRRP。干扰机使用时与BM弹头保持一定距离在弹头前向与弹头伴飞,同时保证两者处于一个雷达探测波束内。
3.1 BM弹头HRRP模拟
圆锥形弹头的HRRP大致如图3b所示,主要由前后2个强散射点、中间弱散射点和弱散射区构成。弹头章动引起的前散射点位置徙动和回波多普勒调制受弹头长度、观测角度、章动角、锥旋速度、雷达一维距离分辨率和多普勒检测能力等多种因素影响表现通常不稳定。BM弹头距雷达较远时,HRRP中的弱散射区容易与基底噪声混在一起,雷达常常难以检测。目前宽带成像雷达检测HRRP确定真假目标常用的准则是:散射点个数及间距与弹头HRRP相关系数不小于0.8,强散射点强度均方误差不大于2 dB。显然使用这一准则应事先对弹头HRRP有所了解(实际上雷达在检测HRRP识别目标时,有事先准备好的HRRP数据作为识别参考)。
干扰机在模拟BM弹头HRRP时,应注意以下几个主要特征:
(1)像长
干扰机在制作BM弹头HRRP时,首先需对探测雷达进行无源定向,确定探测雷达方向,根据BM弹头长度和相对探测雷达的姿态角,确定弹头在雷达观测方向上的径向长度

式中:L为弹头轴向长度;θ为弹头轴线与雷达观测方向上的夹角。
(2)散射点个数和位置
根据L'和事先测量的BM弹头HRRP特征确定所要模拟生成的强、弱散射点的个数和位置。
(3)散射点强度
根据干扰机接收天线收到的雷达照射信号功率,参照弹头强散射点的 σHRR,确定需要模拟的HRRP中各强散射点信号的强度。
(4)前散射点位置徙动范围和速度
弹头质心通常偏向后端,弹头章动以质心为参考点,雷达从前侧向观测弹头时,前鼻锥散射点位置徙动比后边缘散射点明显,相对来看可考虑只模拟前鼻锥散射点位置徙动即可。干扰机根据雷达观测方向、弹头长度、质心位置、章动角确定鼻锥散射点的位置徙动范围,再根据弹头锥旋速度确定鼻锥散射点位置徙动速度。
(5)鼻锥散射点回波微多普勒调制
弹头以质心为参考点的章动引起弹头摆动,雷达从前向观测时,鼻锥点的摆动要大于后边缘的摆动,鼻锥散射点回波信号的多普勒调制要强于后边缘散射点,可考虑只模拟鼻锥散射点的多普勒调制特征。干扰机根据雷达观测方向、弹头长度、质心位置、章动角、锥旋速度确定前鼻锥散射点回波信号的多普勒调制参数。
参照雷达生成HRRP原理,BM弹头HRRP可看成是由多个单元像素构成的,每个像素间距等于雷达距离分辨率δ(c/2Bw)。像长为L'的BM弹头HRRP可看成是由N个单元像素构成的,N=L'/δ。雷达检测圆锥形BM弹头HRRP的主要参考依据是HRRP中前后2个强散射点的相对位置和幅度,对于头舱一体的BM弹头,还需兼顾中间散射点的位置。弱散射区特征由于难以准确把握往往不作为识别目标的主要特征。需要说明的是,虽然强散射点在文字表述上称为“点”,但在HRRP中实际上是由若干个像素点组成的尖峰图形,也就是说强散射点是有宽度的,需要用多个像素点去模拟。
电子假目标干扰机依据需要模拟的BM弹头HRRP的各项要素(有些要素需要事先预知),逐一生成各单元像素信号,其对应的时间间隔发送回给雷达。图4示意了各单元像素信号时间位置上的相对关系。

图4 各单元像素信号时间位置相对关系Fig.4 Image elements relative time position relation
雷达宽带成像时发射的信号脉宽T通常大于其接收信号的时间分辨率Δt(1/Bw),这样就要求干扰机发射的大量单元像素信号在时间上是重合的,进而要求干扰发射机有较大的输出功率动态范围,尽可能降低由于发射机电路非线性引起的交叉调制信号分量,保证输出信号频谱质量,避免在模拟的弹头HRRP中引入过大失真。
电子假目标干扰机产生HRRP工作原理如图5所示。DRFM电路存储雷达照射信号,延时电路产生单元像素间距和前散射点位置徙动,幅度调制电路设置各单元像素强度,频率调制电路产生前散射点信号中的多普勒调制。

图5 雷达一维假目标像产生Fig.5 HRRP generation
3.2BM弹头HRRP遮盖
使用大功率噪声信号遮盖被掩护目标是常用的雷达干扰手段,对于宽带成像雷达来说,噪声信号同样也有遮盖干扰作用。
使用电子假目标干扰机生成HRRP时,如果各像素信号幅度足够强且有足够的闪烁起伏,且干扰信号有足够的持续时间,则这种假目标像可以起到对真实BM弹头HRRP的遮盖作用。使用这种方法遮盖BM弹头HRRP理论上可行,但从工程上来看,与其他遮盖方法相比略显复杂。
噪声信号是常用的遮盖干扰信号形式,工程上实现也相对容易,下面讨论噪声信号在遮盖BM弹头HRRP上的应用。
设:雷达发射宽带信号带宽为Bw,脉宽为T,雷达中频带宽为B。
则:雷达成像窗口频带宽度为B,成像窗口时间宽度为B(T/Bw)。
雷达接收机本振信号持续时间为B(T/Bw)+T。一般情况下,B≪ Bw,B(T/Bw)+T≈T。用频率为F的抽样脉冲对B(T/Bw)+T时间内接收的信号进行抽样,再作FFT,得到分辨率ΔB=1/(B(T/Bw)+T)≈1/T的离散信号频谱,抽样点数M=(B(T/Bw)+T)F,能够检测的最高频率分量为MΔB。实际上,由于雷达中频A/D带宽为B,为保证采样信号质量,混频后的信号需要使用带宽为B的低通滤波器滤波,滤除频率高于B的信号分量,这样由FFT运算得到的实际有效频谱分量数为B/(1/T)=BT,能够检测到的最高频率分量为B。
(1)宽带噪声信号
若使用宽带噪声信号遮盖BM弹头HRRP,设噪声信号瞬时带宽与雷达探测信号带宽相同均为Bw,持续时间等于雷达本振持续时间B(T/Bw)+T≈T,这样,在雷达本振瞬时频率变化时间内,总有带宽为2B的一部分噪声被折叠混频进雷达中频带宽B内,成为有效干扰信号。带宽为2B的干扰信号占整个干扰信号功率的2B/Bw。经折叠混频成带宽为B的噪声信号经FFT后,设得到的离散谱线幅度均匀,则有效功率谱线数量为B/(1/T)=BT,每根谱线高度为P1/(BT)=2P0/(BwT)(P1对应2B带宽内的噪声信号功率,P0对应Bw带宽内的噪声信号功率)。干扰功率将会引入带宽损失(损失因子为2B/Bw)和功率稀释(稀释因子为1/BT)。
由于雷达本振持续时间为B(T/Bw)+T≈T,只有在这一时间段内到达的噪声信号能够进入雷达接收机,因此噪声干扰信号持续时间无需过长,只需在起始时间对准雷达成像窗口前沿的情况下,持续时间稍大于B(T/Bw)+T即可,这样可提高干扰机的工作效率。
全去斜技术是在频域上检测目标,从干扰效果上看,使用调频噪声或者调幅噪声两者差别不大,但从发射机设计上看,调频噪声信号对发射机最大输出功率的利用率要稍高于调幅噪声。
(2)窄带固定瞄频噪声信号
若使用固定中心频率的窄带噪声信号遮盖BM弹头HRRP,即干扰机以接收到的雷达探测信号前端某一小段频率均值为中心频率,产生带宽为2B的窄带噪声信号发送回给雷达。雷达工作在宽带成像模式时,本振频率是滑动的(线性调频规律),这样窄带固定瞄频噪声信号进入雷达中频通带B的持续时间只有2BT/Bw,有效进入功率随进入时间线性递减,起始值为P0(对应2B带宽的噪声信号),终止值为0,雷达接收机作FFT时,采样时间长度不变,A/D变换时,采样信号后面有一部分是0值,这样在T时间内噪声信号平均功率为(P0/2)(2BT/Bw)/T=P0B/Bw(带宽损失),而有效频谱分量数量仍为BT,假设FFT运算后得到的频谱均匀(实际包络为辛格函数),则每根谱线高度 P2=P0B/Bw/(BT)=P0/(BwT),信号功率在频域上被稀释了1/(BT),每根功率谱线高度是总功率的1/(BwT),信号功率衰减情况与宽带噪声信号基本相同。
(3)窄带扫频瞄准噪声信号
若使用窄带扫频瞄准噪声遮盖弹头HRRP,即噪声信号中心频率实时跟踪雷达本振信号瞬时频率(包括具有相同的起始频率、线性调频斜率和最大调频频偏),噪声信号瞬时带宽为2B,噪声信号经混频后,带宽被折叠为B,这样在雷达本振持续时间B(T/Bw)+T内进入雷达中频通道的噪声信号在时间上是连续的,设噪声信号功率为P0,FFT后得到的频谱均匀,则有效频谱分量数量仍为BT,每根谱线高度为P0/(BT),即被稀释了1/(BT),与前面两种噪声信号相比少了频带损失。
(4)单点目标信号延时重叠构成遮盖信号
若使用单点目标信号延时重叠构成遮盖信号,每个点目标信号时延间隔等于雷达接收信号到达时间分辨率Δt。如果干扰机只是转发雷达照射信号(不跟踪雷达本振频率变化),则在雷达成像时间窗口B(T/Bw)内,干扰机需要发射单点目标信号的数量为(B(T/Bw))/Δt=BT,通常 T≫Δt,因此大部分单点目标信号在时间上是重叠的,如图4所示。假设 B=30 MHz,T=0.1 ms,则有大约 3 ×103个信号在时间上是重叠的,如此大量的信号在时间上高质量重合叠加无论是在模拟电路上还是在数字电路上实现都有一定难度。
由上可见,4种噪声信号均可实现对BM弹头HRRP遮盖,各有优缺点。宽带噪声和窄带固定瞄频噪声工程实现上原理简单,干扰信号能量利用率低;单点目标信号延时重叠构成遮盖信号能量利用率高,但工程实现复杂;窄带扫频瞄准噪声信号能量利用率较高,但有一个实时跟踪雷达线性调频本振频率滑动的问题。
4 结束语
目前宽带成像雷达对目标的成像检测能力是以前非成像雷达所不具备的。就目前电子干扰机实际应用水平来看,对BM弹头HRRP进行欺骗干扰难度较大,相比之下遮盖干扰比较容易实现些。值得说明的是,根据目前宽带成像雷达工作时采取先跟踪后成像的特点,干扰机如果在雷达搜索和跟踪阶段就能使用遮盖式干扰遮盖干扰机后面的BM弹头,则有可能使雷达即使转到成像模式也不能发现干扰机后面成像窗口以远的BM弹头。
干扰信号功率与其持续时间乘积是干扰机在相应时间内发出的干扰信号能量,雷达压缩信号脉宽取得压缩增益是信号能量位置上的转移,没有信号能量的额外增加,雷达接收机信号功率放大器不改变接收信号的信噪比,遮盖式干扰的有效性最终主要还是取决于雷达和干扰机的信号能量对比,当然提高干扰信号能量利用率也是干扰机设计的一项重要内容。
[1] 黄培康,文树梁,闫锦.宽带雷达/导引头技术前瞻[C]∥雷达目标识别与宽带成像技术文集.北京:中国航天科工集团第二研究院二十三所,2007:1-17.
[2] 李宝柱.基于一维距离像的目标识别方法综述[C]∥雷达目标识别与宽带成像技术文集.北京:中国航天科工集团第二研究院二十三所,2007:102-109.
[3] Merrill I Skolnik.雷达手册[M].王军,林强,米慈中,等,译.北京:电子工业出版社,2003.
[4] 李宝柱,袁起,何佩锟,等.一种利用宽带信号对弹道目标成像和跟踪的方法[J].系统工程与电子技术,2009 年,31,(7):1588 -1591.
[5] Donald R Wehner.High-Resolution Radar[M].Second Edition.London:Artech House Boston,1995.
[6] Allen Taflove,Korada Umashankar.Radar Cross Section of General Three-Dimensional Scatterers[J].IEEE Transaction on Electromagnetic Compatibility,1983,25(4):433-440.
[7] 黄培康,殷红成,徐小剑.雷达目标特性[M].北京:电子工业出版社,2006.
[8] 袁莉,陶巍.弹道导弹目标的距离像特征与特性分析[J].制导与引信:目标特性专刊,2009,30(2):7-10.
[9] 高红卫,谢良贵,文树梁,等.基于微多普勒特征的弹道导弹目标识别技术研究[C]∥雷达目标识别与宽带成像技术文集.北京:中国航天科工集团第二研究院二十三所,2007.
[10] 宁超,王超,殷红成,等.弹头目标微运动的建模与仿真[C]∥雷达目标识别与宽带成像技术文集.北京:中国航天科工集团第二研究院二十三所,2007.
