热交变压力伺服控制系统设计
2011-04-10长江大学电子信息学院湖北荆州434023
(长江大学电子信息学院,湖北 荆州434023)
汽车空调的压缩机、冷凝器、蒸发器以及各种管路等附件随着汽车工况的不同会承受各种高、低压力的冲击,而检验这些零部件受压能力的最好方法是进行交变压力耐久试验。试验的关键是需要对压力进行精确控制,另外还需要对循环介质的温度及环境温度进行自动控制,这对控制系统的性能和可靠性提出了很高的要求。笔者针对当前国内汽车空调试验的实际需求以及国外先进设备的现有功能,采用将计算机控制技术和可编程逻辑控制器组合在一起的控制技术[1],提出了控制系统的设计方法及思路,并阐述了部分软硬件实现方法。
1 系统结构设计
系统总体结构如图1所示。图中STC89C54是下位机的核心控制单元,完成系统的现场信号采集、处理、逻辑运算以及控制算法的实现,它与上位机通过串口进行信息的交互。其外围电路有4种电路组成,分别为模拟量输入采样电路、开关量输入采样电路、模拟量输出控制电路、开关量输出控制电路。

图1 系统总体结构图
由于系统要求有比较高的采样与控制精度,所以在设计中采用12位的模数、数模转换器,同时为了完成多点温度和压力的检测与控制,使用8路AI采样通道和4路的AO输出通道;为了完成对多个继电器和电磁阀的状态检测以及准确控制,使用16路的D1通道和16路的DO通道。
2 硬件电路设计
2.1 模拟量输入通道的设计
压力信号采样通道如图2所示。压力传感器的输入信号为-10~+10V的电压信号。电压信号经过U404A电压反向跟随器后,再与U404B的调零电路电压叠加,其目的是用来校正输入信号的零位,接着电压信号再进入U404C的放大滤波电路,对前级的信号进行适当的缩放、滤波处理,使其在A/D的采样范围内,最后在经过2个限幅的保护二极管后经过U404D的电压跟随器送入A/D采样器。
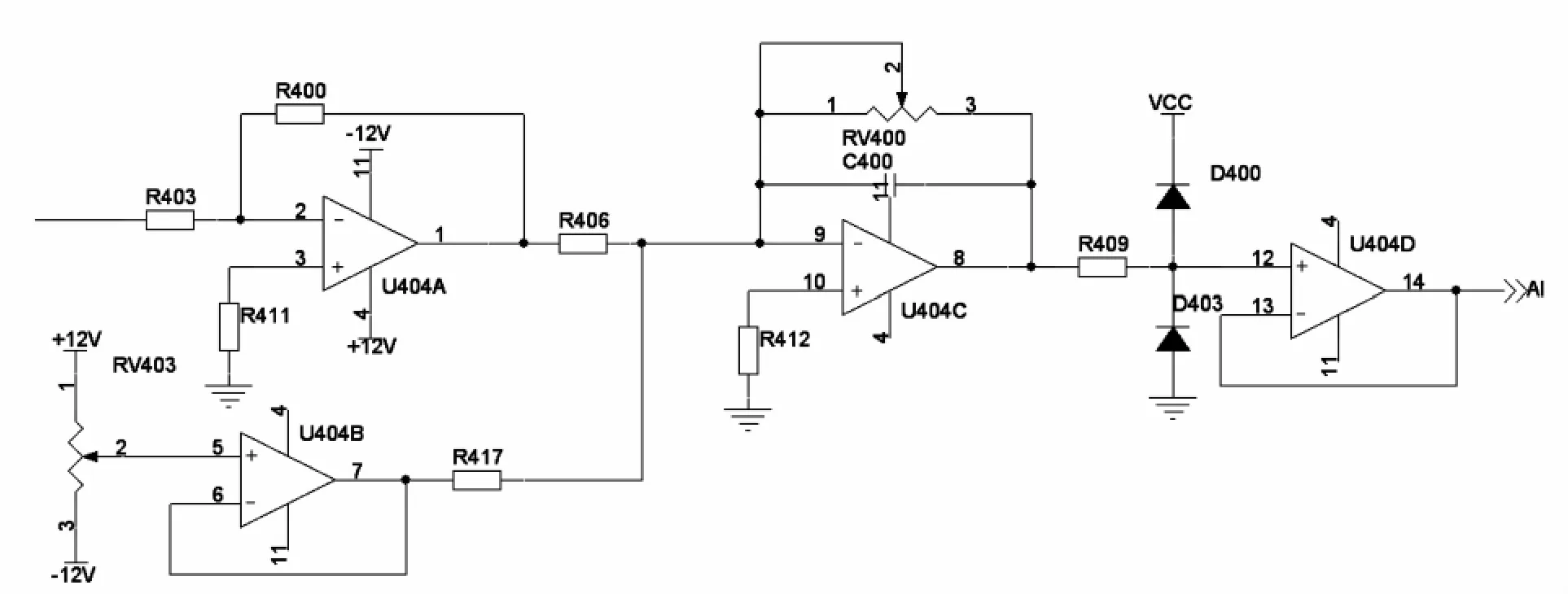
图2 压力信号采样通道
温度信号采样通道如图3所示。温度传感器采用PT100热敏电阻,其阻值随温度上升而增加;PT100与U403A组成温度检测电路,把PT100阻值的变化量转换成U403A输出端的电压变化值,该电压再与U403B所在的调零电路电压叠加,调零的目的是用来校正输入信号的零位。通道中的U403C、U403D两级电路与压力采样通道相同,起放大、滤波、限幅、电压跟随等作用。
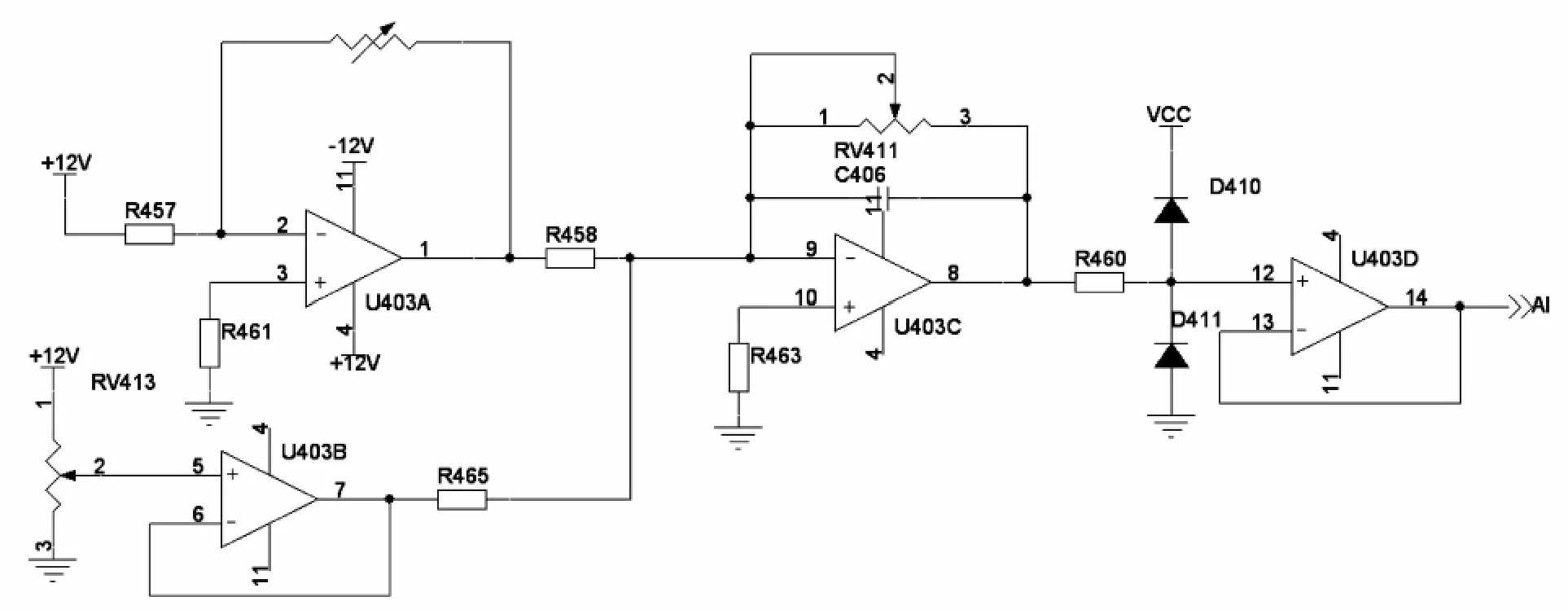
图3 温度信号采样通道
2.2 开关量输入通道的设计
开关量输入通道采用光电隔离器TLP521进行隔离,单片机IO口采样输入端采用1kΩ的保护电阻和10kΩ的上拉电阻,其电路图如图4所示。
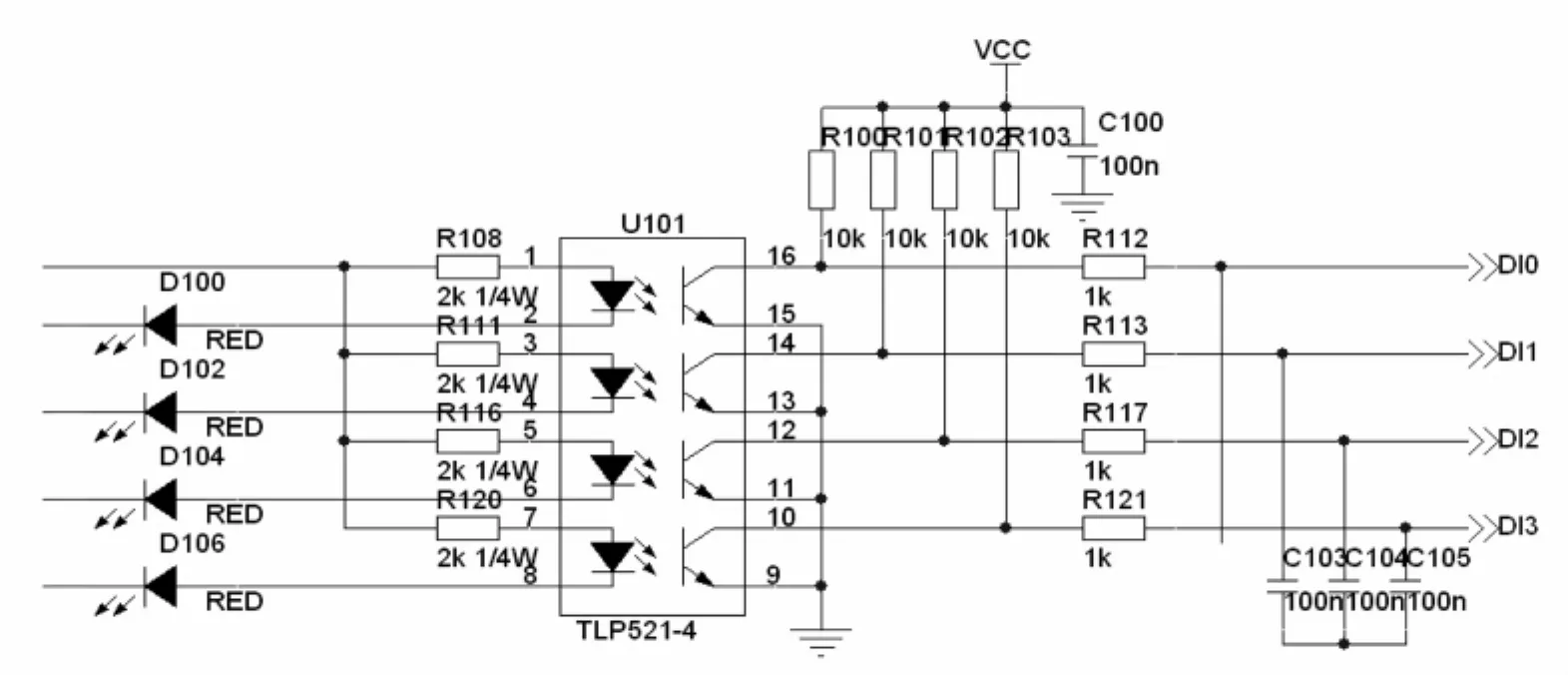
图4 开关量输入通道
2.3 开关量输出通道的设计
开关量输出通道的设计电路如图5所示。数字信号输出端DO经过缓冲器74LS07开漏输出,控制继电器的开端和闭合,从而控制外接电路的通断。
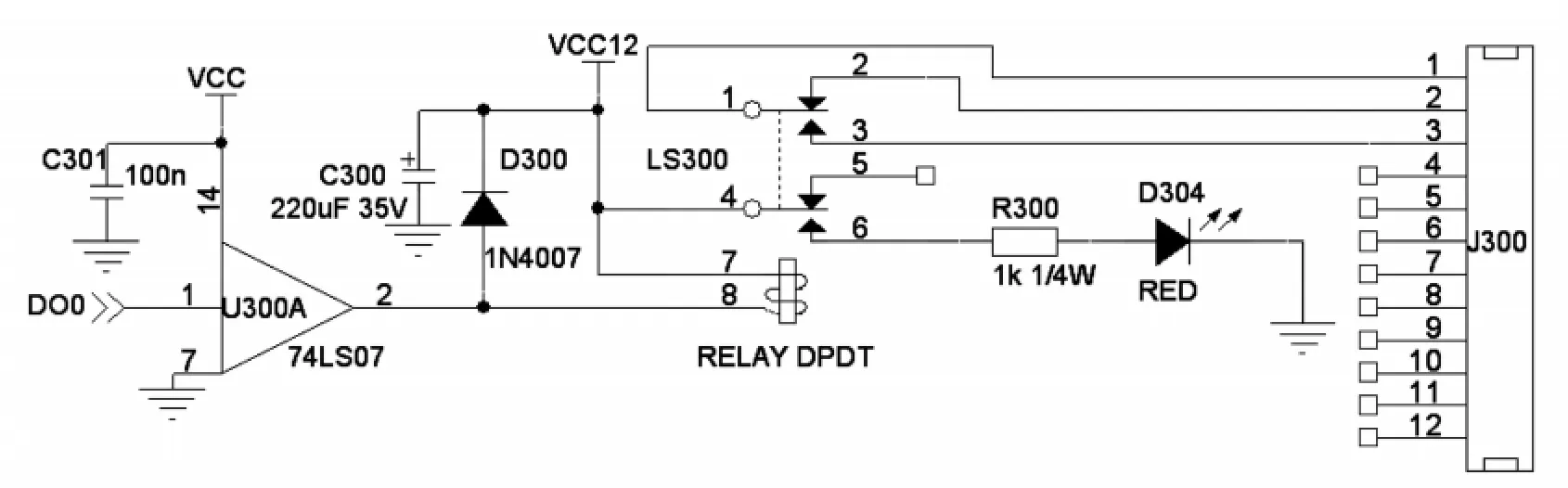
图5 开关量输出通道
2.4 模拟量输出通道的设计
压力控制输出通道是整个控制系统的核心,也是较为复杂的控制单元,其直接驱动一个电液伺服阀,驱动信号为 -7~7mA,具体通道电路如图6所示。
压力控制的数字信号经12位A/D转换成电压信号,经过适当放大,再与调零电路叠加,得到矫正后的控制信号。后一级为电压/电流转换电路,把电压信号转换成 -7~7mA内的电流信号输入到伺服阀的控制信号端,从而实现压力的精确控制。

图6 压力控制输出通道
温度控制输出通道如图7所示。控制温度的数字信号经过12位的D/A后,经前一级运放转换为-5~0V的电压信号,再经后一级的放大滤波电路,转换成0~10V的电压信号并送给加热器的控制部分,从而实现温度的精确控制。
3 控制算法与软件设计
整个软件分为上位机的人机交互软件和下位机的测控软件两部分。上位机为工业控制计算机,其人机交互软件采用VB编写,主要作用是实现与下位机通讯以及人机交互。下位机测控软件的主要任务如下:①采样取得各路温度、压力信号以及开关阀的状态,并对数据进行处理;②完成与上位机的通讯,包括上传温度信号、开关信号以便上位机显示,接收上位机下传的各路温度流量设定值以及各种控制命令以便执行上位机下传的控制命令;③根据内部程序控制算法对温度、流量控制进行实时控制。
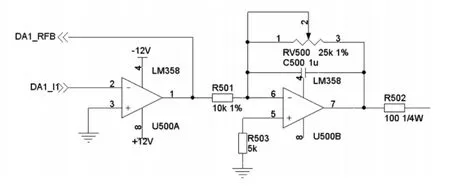
图7 温度控制输出通道
压力控制和温度控制是典型过程控制,也是整个下位机软件的核心部分,其中压力控制是典型的随动控制系统,要求输出压力随给定信号的变化而变化,因而快速性和跟随性是整个压力控制系统最重要的指标。为了确保输出压力跟随的快速性与准确性,对交变压力控制采用双闭环随动控制系统,系统结构如图8所示。内环采用比例微分(PD)控制算法,利用微分环节的超前预估控制作用以提高系统压力跟随的快速性;外环采用比例积分(PI)控制算法,利用积分环节能彻底消除稳态误差的特点以确保压力跟随的准确性[2]。
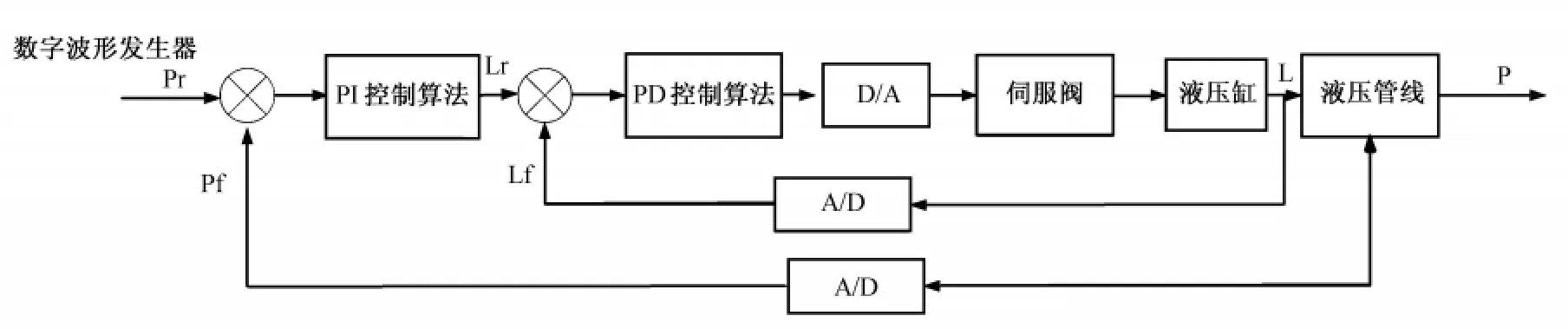
图8 交变压力控制结构图
温度控制分为介质温度控制和环境温度控制,可以通过调节加热丝的平均功率来实现。由于被控对象比较复杂且有很大的滞后性,为确保控制精度,采用基于模糊推理的自整定比例积分微分(PID)控制算法[3],其控制结构如图9所示。
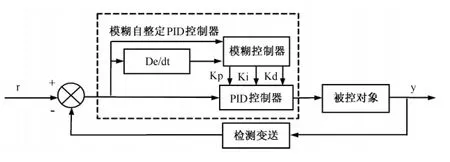
图9 温度控制结构图
[1]邹俊,傅新,杨华勇,等.免疫PID在液压位置伺服系统中的应用研究 [J].机械工程学报,2005,24(1):1-5.
[2]陶永华.新型PID控制及其应用 [M].北京:机械工业出版社,2002.
[3]刘子龙,刘国忠,刘沽,等.一种基于自适应的复合PID控制在非对称缸电液伺服系统中的应用 [J].机床与液压,2004(6):102-105.