曲柄星轮式爬楼梯轮椅爬升机构设计
2011-03-27王占礼赵德超陈延伟孟祥雨
王占礼, 赵德超, 陈延伟, 孟祥雨
(长春工业大学机电工程学院,吉林长春 130012)
0 引 言
根据2008年开展的第二次残疾人抽样推算,我国各类残疾人口总数为8 296万人,残疾人占全国总人口的6.34%。其中,60岁及以上的老年残疾人口为4 416万,占残疾总人口的53.2%,与1987年相比,60岁及以上的残疾老年人增加了2 365万,占到总增加人数的75.5%。随着年龄的增长,残疾人口的比例在不断上升,尤其进入老年后,上升非常迅速[1]。不断增加的残疾人口对医疗和保健有着巨大的需求,成为我国面对的重大社会服务问题。服务机器人的出现可以有效地缓解医务人员不足的现状,提高残疾人的生活质量,为我国社会的稳定发展起到积极作用。
近年来,国内外许多公司、大学和研究机构都对攀爬楼梯的助行系统进行了深入研究,也提出了各自的产品或解决方案。美国著名发明家迪恩卡门发明的“独立机动系统”(iBOT)是目前星型轮机构助行系统中较独特、性能指标最高的产品。
日本的“Freedom”轮椅很好地解决了上、下楼梯时的姿态平衡问题[2]。英国的BARONMEAD轮椅车可在平地自由运行,还可拆卸为两部分,便于装运[3]。
目前,爬楼梯轮椅操作复杂、体积和重量大、价格昂贵,所以在现实生活中没有得到广泛应用,例如,iBOT成本较高,售价昂贵(近 29 000美元),对于普通的残疾人家庭来说只能望而却步[4];Jianjun Yuan和Shigeo Hirose设计的Zero Carrier I型轮椅对传统的腿足式进行改进,但由于脚轮尺寸太小,并不适于作为普通轮椅使用,而且因为结构复杂,目前仍处于实验样机状态[5]。曲柄星轮式爬升机构突破了传统的爬楼梯全自动的概念,采取他人辅助上楼方式,在很大程度上降低了爬楼梯轮椅的成本和难度[6]。
1 爬升机构工作原理
曲柄星轮爬楼梯轮椅的爬升机构由两套曲柄星轮及链传动构成,其工作原理如图1所示。
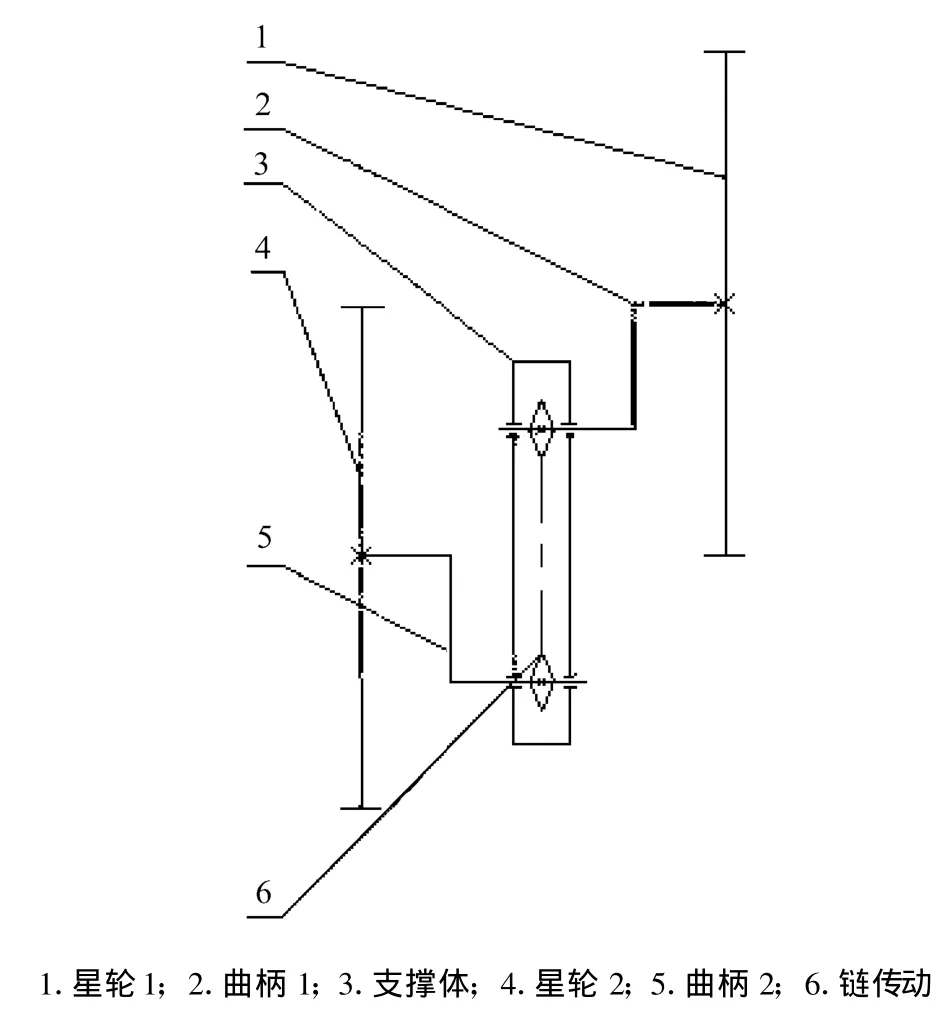
图1 爬升机构工作原理图
两套曲柄星轮通过链条进行动力传动,通过曲柄星轮的交替运动来完成爬升动作。以上工作原理的具体实施方式如图2所示。


图2 爬楼梯过程图
在(a)状态时,星轮1在下,星轮2在上,处在准备爬升状态,此时曲柄2与星轮2绕曲柄轴顺时针旋转,同时,由于链传动作用,曲柄1与星轮1绕曲柄轴顺时针旋转直到(b)状态。在(b)状态下继续以上运动即可达到(c)状态,在(c)状态下星轮1与星轮2重合,此时已完成一次爬升运动。在(c)状态下继续运动至(d)状态,为下一次爬升运动做准备。至此,一次爬升循环结束。下楼运动与爬升运动相反即可实现。
2 爬升机构结构设计
位于轮椅后侧的4个轮子是爬升装置的运动机构,爬升机结构如图3所示。

图3 爬升机结构
在轮椅的内、外两侧框架上分别装有一对车轮,每对车轮均由内、外轮构成。在下文中以位于左边的爬楼梯轮子说明详细的机构组成。爬楼梯的轮子在平地行走时是收起的,平地行走由前面的轮毂电机轮驱动。左侧爬楼梯轮子由内外两个轮子及两个传动轴组成。在此爬升装置中装有一个轮组,轮组中的两个轮子相对偏心轴都是可旋转的,并且两个轮轴有一定相对距离且联合驱动。驱动轴和轮子心轴相连接,其目的是使轮子心轴上安装一个曲臂圆盘(其中曲臂圆盘成为轮缘),可以绕心轴同心旋转。其中轮组中两个轮子的驱动轴之间的距离是轮子半径的2倍,至少应保证约为2倍关系。当此装置在台阶上运行时,由于轮组中轮子的偏心旋转,其中一个轮子向上翻转落在台阶上,随之第二个轮子也向上翻转落在同一台阶上。此时该装置已经完成一次爬升,接下来第一个轮子继续向下一台阶翻转,由于第一个轮子在向上翻转时第二个轮子作为支撑轮,所以该装置不用再加额外支撑。
由一个可逆电机输入动力,有链传动同时串联地传递给两个驱动轴即可,其中把两个驱动轴联合驱动的目的是,当两个轮子都相对于驱动轴旋转180°的时候,轮组中的两个偏心轮将同心。在这个爬升装置中,其轮组中的每个轮缘在心轴部分轴向通过轴承挡圈定位,并安装轴承定向锁,因而轮缘可固定方向运动,即在爬楼梯时反向旋转。因而即使在爬升时有轮缘刹车,爬升装置相对楼梯的方向运动也是有可能的,因此可以加一个刹车装置解决,例如自动控制电磁刹车装置。它可以阻止轮子继续移动而不用打断旋转运动或行程运动。在爬升过程中,一个轮对可通过这个刹车装置固定在楼梯边缘,另一组偏心轮对通过旋转运动着陆在另一台阶上。这个轮缘可通过轴承套安装在轮心轴上,在心轴上安装链轮,同时,在驱动轴上安装一个相同的链轮,两个链轮通过链传动,传动比为1∶1。这个电磁刹车装置可安装在心轴上或者轮缘上。
在没有刹车动作时,刹车装置中的刹车盘和轮子以相同速度转动。在刹车位置,通过刹车盘轮缘锁死,爬升轮的行程运动由于偏心安装而不受影响。由于链传动轮缘处于锁死状态,所以刹车装置轴承定向锁的运动方向是可以被限制的。
3 爬升机构稳定性分析
至今,iBOT仍是世界上较为先进的爬楼梯轮椅,它的工作原理源于基本的行星轮运动系统[7],车轮能够围绕各自轴线转动,也能够随着系杆作绕中心轴的转动。iBOT轮椅驱动轮的直径为305 cm,运动轨迹的半径与车轮的半径是相等的,其运动轨迹如图4所示。

图4 iBOT的运动轨迹图
文中爬升装置轮子半径为105 cm,其轨迹如图5所示。
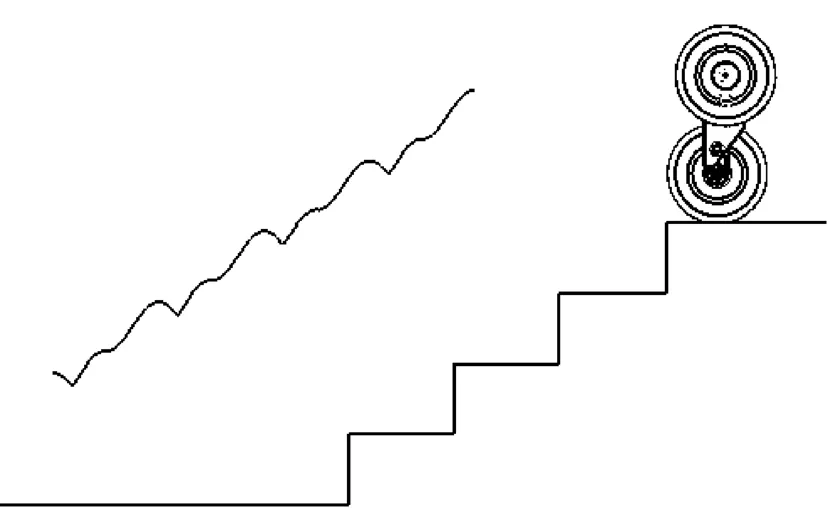
图5 曲柄星轮机构的运动轨迹图
运动轨迹半径为中心至驱动轴的距离。二者对比,iBOT的运动速度很快,但是它的起伏很大,文中所设计的虽然速度相对较慢,但是运动的轨迹很平滑,使用时减少颠簸,提高了舒适度。
4 结 语
文中主要完成爬楼梯轮椅的爬升机构设计,为今后进一步研究设计奠定一定基础。本设计的优点在于爬升动作简单,控制容易;结构小巧,制造成本较低;爬升效率较高;对于各种尺寸的楼梯有较强的适应能力,可以适应一定范围内任意尺寸的楼梯;爬升过程中重心变化小,运行平稳。
[1] 丁志宏.我国残疾老年人口:现状与特征[J].人口研究,2008(4):3-4.
[2] Hashino,Satoshi.Development of crawl type stair lift for wheelchair users[J].Annual International Conference of the IEEE Engineering in Medicine and Biology-Proceedings,1996(2):533-534.
[3] Hashino,Satoshi.Development of new type stair lift for wheelchair users[J].Proceedings of the Japa/USA Symposium on Flexible Automation,1996(1):233-236.
[4] Lawn M J,Ishimatsu T.Modeling of a stair-climbing wheelchair mechanism with high single-step capability[J].IEEE T rans Neural Syst.Rehabil Eng.,2003,11(3):323-32.
[5] Victor Paquet,David Feathers.An anthropometricstudy of manual and powered wheelchair users[J]. International JournalofIndustrialErgonomics,2004,33:191-204.
[6] 苏和平,王人成.爬楼梯轮椅的研究进展[J].中国康复医学杂志,2005,20(5):366-367.
[7] 项海筹,乌兰木其,张济川.手动爬楼梯轮椅[J].中国康复医学杂志,1994,9(21):62-66.
