基于输出反馈的一类随机时滞系统的稳定性
2011-03-26刘文奇焦贤发
刘文奇, 焦贤发
(合肥工业大学数学学院,安徽合肥 230009)
近年来,随机系统的稳定性一直被广泛研究,随机系统常见于众多的工程系统与生物系统中。另外,时滞是众多生物过程的固有属性,通常会导致一个控制系统不稳定或者其他一些不好的指标出现,因此时滞系统得到了广泛研究[1-8]。文献[1]基于状态观测器的输出反馈研究了一类线性随机时滞系统的稳定性;文献[3]基于状态反馈研究了一类线性随机时滞系统的随机稳定性;文献[5]中采用状态反馈的方法,研究了一类不确定性随机时滞系统的鲁棒Η∞控制问题。考虑到在物理现实上的意义,本文采用输出反馈条件下,保证闭环系统在一切可容许的不确定性干扰下随机稳定,同时设计出了满足要求的反馈增益矩阵。
1 系统描述及假设
记(Ω,F,P)为一个完备概率空间,w(t)是定义于该空间上的一维标准布朗运动,所考察不确定性随机时滞系统如下:其中,x(t)∈Rn为系统状态;u(t)∈Rn为控制输入;y(t)∈Rm为系统量测;φ(t)为定义于区间[-τ,0]上的一个向量初始连续函数,不确定参数矩阵A(t)、Ad(t)、C(t)、Cd(t)都是时变的,满足:
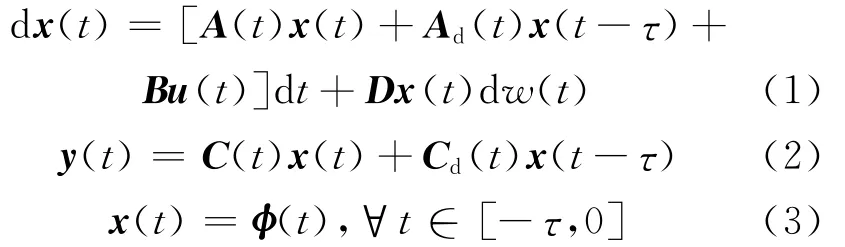

其中,A、Ad、C、Cd、B、D是适当维数的实常数矩阵,且矩阵B是列满秩的。不失一般性,假设不确定参数矩阵ΔA(t)、ΔAd(t)、ΔC(t)、ΔCd(t)是范数有界的,且满足:
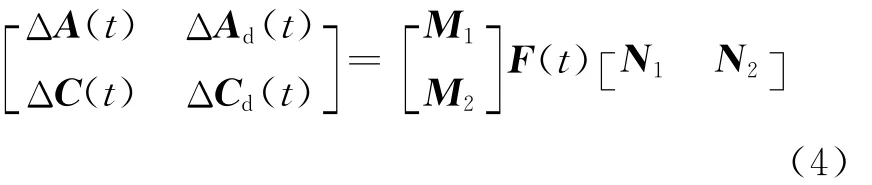
其中,M1、M2、N1、N2是适当维数的实常数矩阵,F(t)是不确定时变矩阵,满足:

引理2 由文献[6],则有:
(1)给定相应维数的矩阵M、N、H,其中M、N为常阵,H可为t的函数,且HTH≤I,则对于∀μ>0,都成立MHN+NTHTMT≤μMMT+μ-1NTN。
(2)给定相应维数的矩阵X、Y,对于∀μ>0,都成立XYT+YXT≤μXXT+μ-1YYT。
定义1 称不确定时滞系统(1)~(3)随机稳定,若对于定义于区间[-τ,0]上的有限向量函数φ(t)∈Rn,系统状态满足:

2 主要结果
对于系统(1)~(3),引入输出反馈

代入(1)式得:

定理1 对于给定反馈增益矩阵L,若存在正定矩阵P>0,Q>0,和正实数μ1、μ2,使得:
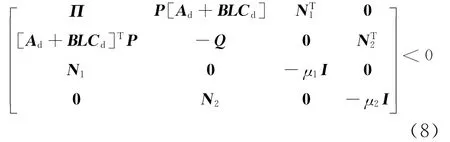
则闭环系统(1)~(3)是随机稳定的,其中
证明 对于t≥0,构造Liapunov函数:

由伊藤微分公式,李雅普诺夫函数的微分为:

经过计算并整理后得:
由引理2得:


结合(9)~(13)式有:
由定理1中(8)式及引理1可得Φ<0,对任意非零向量有:

由(14)式可得:

对任意向量x(t),存在正实数ε使下式成立:

故由Dynkin's公式,对所有的t≥0,有

即

综上及定义1知闭环系统(1)~(3)随机稳定。
从定理1易知,要使受控系统(1)~(3)随机稳定,必须选择适当的反馈增益矩阵L,定理2将给出满足定理1中(8)式的一些L的具体表达式。
定理2 若存在矩阵P>0、Q>0、Y和正实数μ1、μ2,使得:
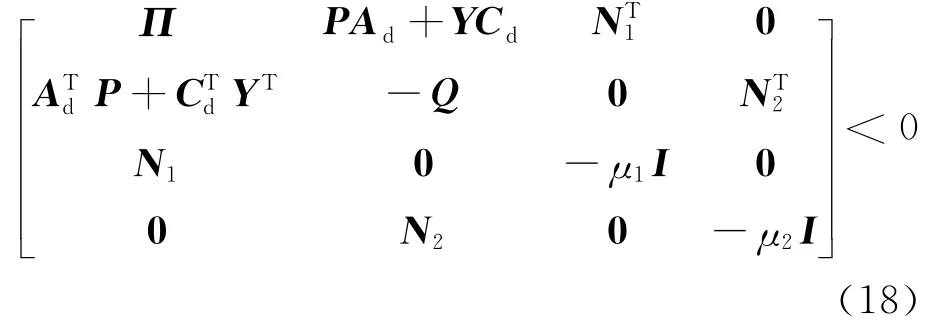
则在增益矩阵L满足PBL=Y的情况下,闭环系统(1)~(3)随机稳定。其中


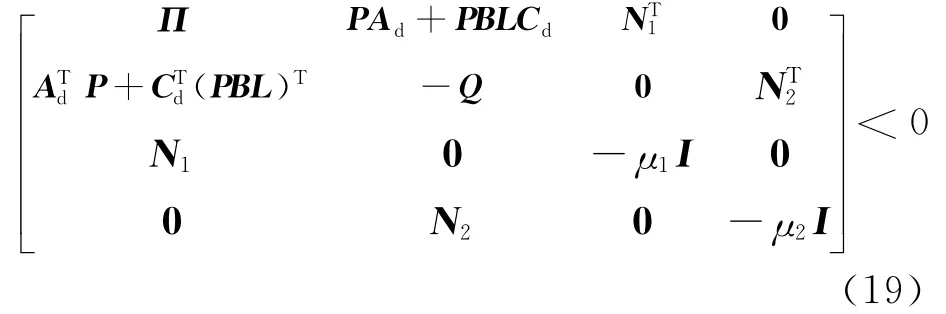
证明 在(18)式中令Y=PBL,则(18)式转化为:将Π=P[A+Y]+[A+Y]TP+(μ1+μ2)[PM1+YM2][PM1+YM2]T+DTPD+Q代入(19)式,则该式转化为(8)式,结合定理1的结论知闭环系统(1)~(3)随机稳定。
由于矩阵B是列满秩的,根据Y=PBL可以解出L的具体表达式,从而可构造出容许的输出反馈控制,使得受控系统(1)~(3)随机稳定。
3 数值例子
基于定理2,给出状态反馈控制系统(1)~(3)的一个二维的数值例子。各系数矩阵如下:
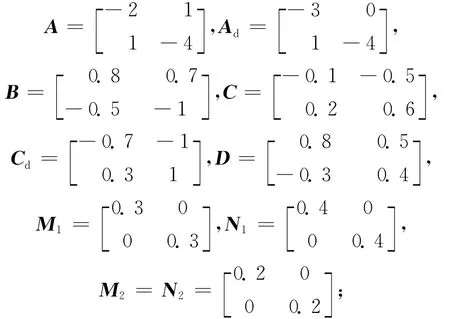
取μ1=0.5,u2=0.5,Q=I,
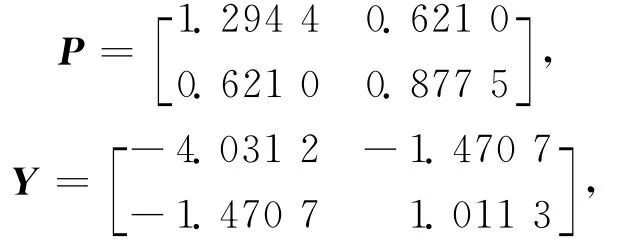

由数值结果,结合定理2知:在输出反馈u(t)=Ly(t)的作用下,随机时滞闭环系统(1)~(3)是随机稳定的。
4 结束语
本文针对一类不确定随机时滞系统,基于输出反馈控制,得到闭环系统随机稳定的充分条件,给出的定理保证了闭环系统在一切容许不确定干扰下是随机稳定的,同时设计出了满足要求的反馈增益矩阵,数值例子验证了方法的可行性。
[1] Chen W H,Guan Z H,Lu X.Delay-dependent output feedback stabilization of Markovian jump system with time-delay[J].IEE Proc:Control Theory Appl,2004,9(5):151.
[2] Zhang Xiaomei,Lu Guoping,Zheng Yufan.Observer design for descriptor Markovian jumping systems with nonlinear perturbations[J].Circuits Syst Signal Process,2008,27:95-112.
[3] Sathananthan S,Adetona O,Beane C,et al.Feedback stabilization of Markov jump linear systems with time-varying delay[J].Stochastic Analysis and Applications,2008,26:577-594.
[4] Zhang L,Shi P,Boukas E K.H∞output-feedback control for switched linear discrete-time systems with time-varying delays[J].International Journal of Control,2007,80(8):1354-1365.
[5] Xu S,Chen T.Robust H∞control for uncertain stochastic systems with state delay[J].IEEE Trans Automat Control,2002,47(12):2089-2094.
[6] Wang Zidong,Shu Huisheng,Liu Xiaohui.Reliable stabilization of stochastic time-delayed systems with nonlinear disturbances[J].International Journal of General Systems,2005,34(5):523-535.
[7] Liu Yurong,Wang Zidong,Liu Xiaohui.On delay-dependent robust exponential stability of stochastic neural networks with mixed time delays and Markovian switching[J].Nonlinear Dyn,2008,54:199-212.
[8] Dragan V,Morozan T.Exponential stability in mean square for a general class of discrete-time linear stochastic systems[J].Stochastic Analysis and Applications,2008,26:495-525.
[9] 李 娜,吴化璋.矩阵值Toeplitz-Bezout矩阵的注记[J].合肥工业大学学报:自然科学版,2010,33(9):1434-1437.