智能导轨式爬架的特点及应用
2011-03-22李巧玲
李巧玲
河南质量工程职业学院(467000)
附着升降脚手架在施工应用中,经常会因沿架长向机位跨度不均,架体结构硬度不同,使各机位受载不等并导致升降中各机位运行不同步,致使架体升降受阻,从而造成机具及架体受载超出许用值而引发故障,为解决这些问题,我们开发了智能化的PJ型智能导轨式附着升降脚手架。
1 智能导轨式爬架的构造
1.1 爬架的工作原理
附着升降脚手架的原理为:在建筑物标准层,搭设4层楼高的双排外脚手架,并通过附着支承结构附着于高层、超高层工程结构上,具有防倾覆、防坠落装置,依靠自身的升降设备和装置,可随工程结构施工逐层爬升至结构封顶,并继而为满足外墙装饰作业要求实现逐层下降,在正常情况下,每升(或降)一次仅需1 h,加上升或降前的准备工作,及就位安装时间,只需半天时间(4 h)即可满足施工围护要求,可以大大提高脚手架的搭设效率,保证了高空操作人员的安全,有力地促进现场文明及加快施工进度。
1.2 爬架的组成
该爬架由传力系统、提升控制系统、防倾防坠安全系统组成。传力系统由低部支撑框架、竖向立框架、支座、常规脚手架组成,其中支座由钢挑梁、承力拉杆、穿墙螺栓和导框等组成;提升控制系统由电动葫芦、控制台以及荷载监控系统组成;防坠安全系统采用与荷载监控系统联接的AQ4型防坠安全制动器;防倾覆安全系统由导轮导轨与顶墙轮组成。(如图 1所示)。
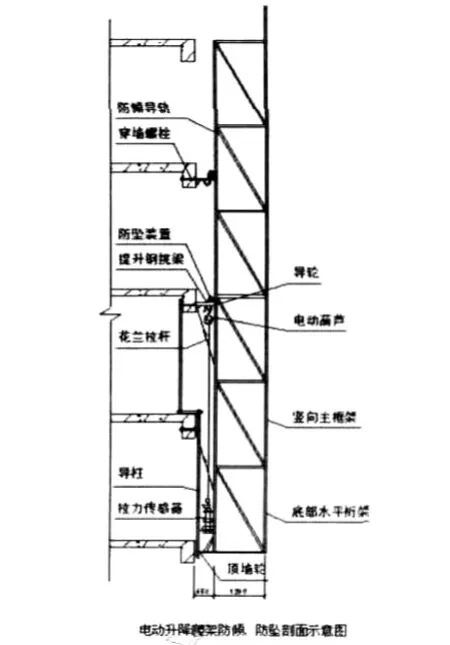
图1 电动升降爬架防倾,防坠剖面示意图
2 智能导轨式爬架的主要技术特点
2.1 架体结构
该爬架的覆盖面为4个楼层,最上层为施工层,中间两层为养护层,底部为拆模层。爬架架体采用φ48×3.5mm钢管和标准扣件搭设,住宅楼架体总高13.5m,离墙距离0.45 m,每两个机位间最大跨距6m,办公楼架体总高15.6m,离墙距离0.55 m,每两个机位间最大跨距6.9 m,架体宽度均为0.9m,步高均为1.8m(如图2所示)。

图2 外爬架立面图
2.2 传力系统
立框架采用片式珩架系统,由导轨、立杆、定型斜杆和小横杆焊接而成;分低节、标准节、顶节、上下节之间采用M20螺栓连接,根据建筑物层高的不同,可组合成不同的高度,顶节作为搭设高度不同的调节用,节于节之间采用螺栓连接,承重珩架由立杆、大小横杆、纵向斜杆等定型构件组成,采用M14螺栓连接。
2.3 提升控制系统
由钢挑梁、升拉杆、电动葫芦和控制台以及荷载监控系统组成。
电动葫芦挂在钢挑梁上,钢挑梁即作不防倾导向装置,又作为承力架使用,底部承重桁架通过电动葫芦,将荷载传递到承力架上,电动葫芦采用DHT型低连环葫芦,起重量为7.5T,提升速度13 cm/min,同一单位工程使用的电动葫芦必须共同厂家生产,同一批号,同一规格的产品,具有防雨、防尘的保护措施。
荷载监控系统(限载预警保护系统)其作为防坠落的事前控制手段,其主要由拉力传感器,控制模块,控制器三个部分组。
2.4 防倾防坠安全系统
1)防倾装置:爬架在升降过程中,其吊点设在底部吊力架内侧,外侧力矩相当大,防倾覆装蓬必须可靠,防倾覆安全系统由导轮,导轮装置、导检及架体底部的顶墙轮组成。主框架以内侧双槽钢作为导轨,钢挑梁上的导轮与主框架上的导轨形成导轮导轮装置,每一片主框共设置2组导轮导轨装置,在提升过程中,使架体滑移起到防倾作用。架体底部设有顶墙轮装置,提升时,可沿建筑物墙体或导拉组件向上滑动,防止架体底部向内倾斜。
2)防坠装置(防坠安全制动器):防坠安全制动器制动原理是,利用凸轮制动刹车杆(φ25)的接触,压力角小于磨擦角的原理设计的,凸轮的另一面(非磨擦面)安装杠杆,江与电磁铁联接,是与机械分开的联动。防坠安全制动器在结构设计上采用了电磁铁吸合形式与机械形式兼容,可以分别控制,也可同时控制。安装时防坠安全制动器安装在托架上,刹车制动杆一端穿过安全制动器,另一端安装在上吊臂上。
2.5 总控制系统
总控制系统是由控制台、荷载增量控制系统、防坠安全器组合而成的操作系统,该系统具有二种操作功能,即有手动荷载监视和自动荷载监控。手动荷载监视在脚手升降时作荷载监视显示,而自动荷载监控除脚手在升降过程中荷载显示外,又可作出分析和处理,能自动切断电动葫芦的电源,同时使安全制动器作制动,因此总控制系统的操作分为“手动”和“自动”二种方式。
3 智能导轨式爬架的主要技术性能
整体脚手的设计计算必须执行建设部下发的关于(建筑施工脚手架安全技术标准的统一规定)。结构施工阶段施工荷载取3 kN/m2,二排作业面;装饰施工阶段施工荷载取2 kN/m2,三排作业面。以及工作状态与非工作状态的风荷载。承力桁架是由φ48x3.5钢管加扣件组成,管子与扣件组成的桁架在节点处有二个较大的附加弯距,且每一杆件均为偏心受压,扣件的受力受到预紧力的限制,所以在计算时主要控制扣件的受力不超过允许的扣件设计值和验算单肢的稳定性。
4 智能导轨式爬架的施工
4.1 爬架的安装
爬架安装工艺流程:在结构上预留穿墙螺栓孔→搭设安装平台→安装钢挑梁并临时固定→拼装、安装、校正竖向主框架→安装底部支撑框架→搭设常规脚手架→铺设脚手板、设置安全网→安装防坠器→安装提升设备→检查验收→投入使用。
4.2 爬架的提升
爬架提升工艺流程:安装上部支座并固定→拆除下部支座→拆除障碍物→收起底部挡板→检查电动葫芦、预紧→提升架体→放下底部挡板→安装架体的拉结点→转入第二次提升。
4.3 爬架的拆除
爬架拆除工艺流程:拆除准备→拆除电缆控制线和操作控制台以及荷载监控设备→拆除电动葫芦→拆除常规脚手架→拆除底部承重桁架→拆除竖向主框架。
4.4 爬架的安全保证
附着升降脚手架的关键是整体稳定性和安全可靠性,整体稳定性由导轮、导轨装置及导柱与架体底部的顶墙轮来保证。安全可靠性由主框架及承重桁架的整体刚度、安全防坠装置、防坠钢丝绳、电气控制系统以及架体周边封闭的密目式安全立网等来保证。
荷载监控系统是作为防坠落的事前控制手段,其主要由拉力传感器、控制模块、控制器等组成,由传感器采集架体升降时的荷载,高差的信号输入控制器,超载时声光报警,并自动调节升降高差,到超限时全部自动停机,解决了升降脚手架自动控制方面的问题。
5 应用实例
佳田大厦是一栋集住宅、办公、商场等多功能为一体的综合性大厦,该工程一裙两塔,东塔为25层住宅楼,高度为98 m,西塔为23层综合楼,高度为102 m,3层裙房,2层地下室,总建筑面积为5 4451m2,框架剪力墙结构,该工程总投资近1亿元,其中土建工程4 500万元,是平顶山市的又一重大工程,该工程被列为平煤土建公司的重点工程。
平煤土建公司首次在佳田大厦工程中使用这种新型外墙爬架,如外墙采用固定脚手架搭设,预算造价114万,改用本文所述的智能爬架工艺后,投入资金55.6万元,节约费用51.2%,节约了大量人力、物力,大大加快了施工进程,取得了良好的经济效益和较大的社会效益。
[1]孙焱.浅谈高层建筑施工中整体电动爬架的应用[J].科技信息,2009,18.
[2]仇铭华,戴红妹,周鹤鸣.双导轨下座式智能化爬架的特点及应用[J].建筑技术,1998,9.
