钢筋弯曲过程的有限元模拟
2011-03-17孟欣佳张立香
孟欣佳,张立香
(1.山西机电职业技术学院,山西长治046011;2.中国农业大学工学院,北京100083)
随着机电一体化技术的发展,一些自动化程度较高的钢筋自动成型加工机已经出现。国外对这方面的研究起步较早,从20世纪80年代初就开始研制这种机器。1998年,Unimatic18 XV型钢筋自动成型加工机在Stema出现[1]。我国的弯曲机从70年代开始起步,80年代初形成一定的规模。1996年刘鸿鹰对GW40B型的钢筋弯曲机进行了深入的研究。目前弹塑性时程分析主要集中在复杂特殊结构工程应用上[1-2],常用结构软件包括ANSYS、SAP2000、ETABS、Midas等[3]。本文选取工业中常用的Ф 12钢筋,以弯曲角度为90°时为例,采用ANSYS软件进行模拟分析,为自动弯曲钢筋机的设计提供一定的理论基础,并对手动弯曲钢筋时具有现场指导意义。
1 实体模型的建立
ANSYS/LS-DYNA可通过自身来建模,也可通过外部的接口与CAD专用软件进行数据交换,导入模型。为防止导入模型产生变形,本文采用LS-DYNA自身来建模。
在建模过程中,必须向程序提供统一单位制的数据,否则将不能得到正确的分析结果[4]。ANSYS/LS-DYNA软件并没有为分析指定系统单位,可以使用任何一套自封闭的单位制(自封闭是指这些单位量纲之间可以互相推导得出),只要保证输入的所有数据的单位都是正在使用的同一套单位制里的单位即可。
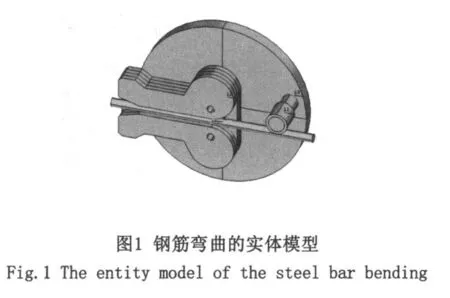
在建模时,将笛卡尔坐标系的Z轴,也就是ANSYS/LS-DYNA软件默认的坐标系的Z轴设为弯箍转盘的回转轴线。弯曲钢筋直径为Ф 12。所建立的实体模型如图1所示。
2 建立有限元模型
2.1 设置单元属性
本文中的模型均采用SOLID164实体单元。该单元由8节点构成,只用在动力显示分析,支持所有许可的非线性特性,并且该单元不需要设置实常数。SOLID164实体单元的积分算法有两种:在默认的情况下采用一点的积分加上粘性沙漏控制来加快单元的方程式;另一种是全积分算法,虽无沙漏问题,但计算速度缓慢,是一种不常采用的算法。本文采用默认的积分算法。
2.2 定义材料模型
本文主要研究的内容是钢筋弯曲的变形过程,而其他模型的变形可以忽略不计,因此根据实际情况,将箍筋模、弯箍转盘、转轴和转套定义为刚体,钢筋为变形体模型。将箍筋模、弯箍转盘、转轴和转套定义为刚体可以大大减少显式分析的计算时间,这是由于刚体内所有节点的自由度都耦合到刚性体的质量中心上去了,不论定义了多少个节点,刚性体仅有六个自由度。钢筋为变形体,采用双线性各向同性硬化模型(BISO),该模型使用两种斜率(弹性和塑性)来表示材料的应力应变行为,且为理想弹塑性变形体。由此得各材料模型的参数如表1所示。
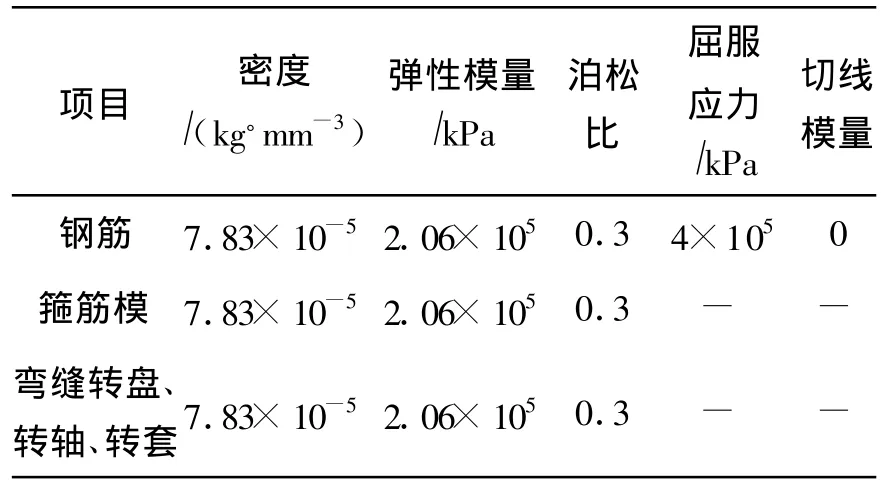
表1 模型的材料参数Tab.1 The material parameter of the model
2.3 划分网格
由于本文研究的实体模型较为复杂,因此采用自由网格划分的方式。本文主要研究钢筋的变形情况,为使研究的精度较高,钢筋的网格划分应尽量密一些,其他模型可以稀疏一些。为达到这一目的,钢筋划分网格的单元边长设为1.5,箍筋模、弯箍转盘、转轴和转套的单元边长设为2.5,整个模型共得到140 578个单元,166 001个节点。据此所建立的有限元模型如图2所示。
3 约束处理
在本模拟中,箍筋模固定不动,需限制所有的自由度(弯箍转盘、转轴、转套限制Z方向的平动自由度,并限制绕X、Y轴的转动自由度)。此外,弯箍转盘在载荷的作用下,只允许绕着回转中心旋转,而且回转中心是固定不动的,因此必须对弯箍转盘的回转轴线施加约束,否则在弯曲力的作用下弯箍转盘将会上下左右移动,即同时限制弯箍转盘回转轴线沿X轴和Y轴方向的平动自由度。
4 定义接触
接触算法是程序用来处理接触面的方法。在ANSYS/LS-DYNA中有单面接触(Single Surface)、点面接触(Nodes to Surface)和面面接触(Surface to Surface)。本文采用的是单面接触。单面接触用于当一个物体的外表面与自身接触或和另一个物体的外表面接触时使用。程序将搜索模型中的所有外表面,检查是否相互发生穿透。由于所有的外表面都在搜索范围内,因此不需要定义接触面与目标面,在预先不知接触情况时,单面接触非常有用。由于在接触分析中,很难判断钢筋与其它模型接触发生的方向,因此本文采用单面接触(Single Surface)中的自动接触(Automatic ASSC),它不需要人工干预接触发生的方向。
5 施加载荷
对于刚体,应该将载荷施加到PART号上,因此必须生成 PART号。需要注意的是,在生成PART号之前,必须确认所有实体均被选择,以免遗漏某些实体。在本文模型中,共生成了7个PART号,弯箍转盘的PART号为1。
在ANSYS/LS-DYNA有限元动态模拟过程中,在加载之前,首先要定义时间数组及其对应载荷数组。弯箍转盘的转速为1 080°/s,本文的载荷分5步加载,载荷类型为RBR,即弯箍转盘绕回转轴线也就是Z轴转过的角位移。在LS-DYNA程序中,默认的角度单位是弧度(rad)。时间—载荷的数组取值如表2所示。

表2 载荷(时间—角位移)Tab.2 The loading(time-angular displacement)
另外,在瞬态动力学问题中,经常需要定义系统的初始状态,如初始速度等。赋给初速度的对象可以是节点、组元和PART号。本文通过对弯箍转盘的PART号来施加初速度,弯箍转盘的初速度为-18.84rad/s。
6 不同时刻应力的变化情况
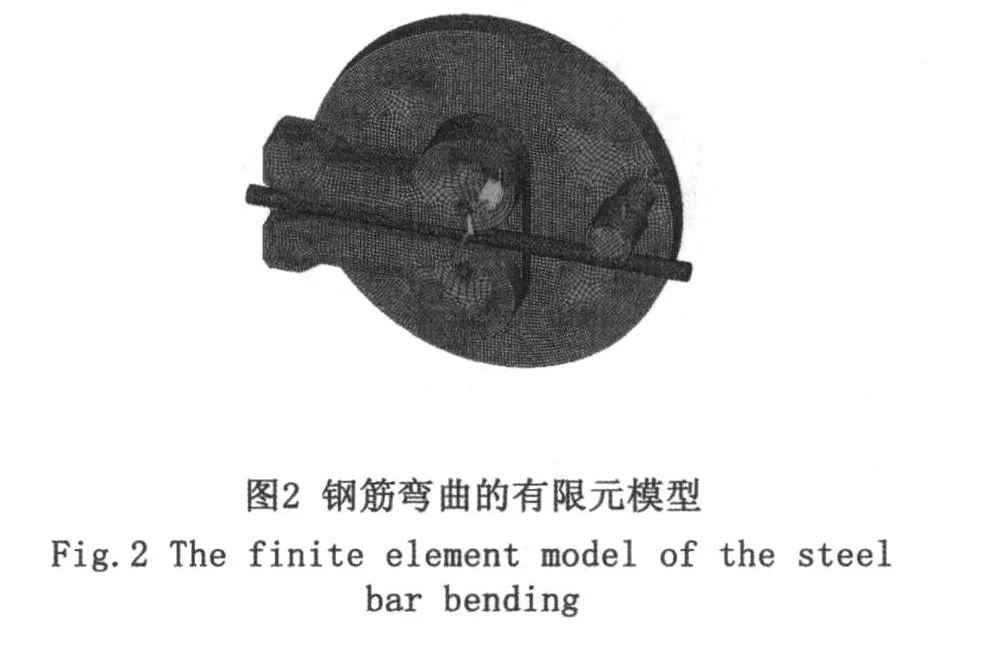
ANSYS/LS-DYNA非线性有限元分析软件提供了两种观察结果的方法:ANSYS后处理器和LS -Prepost后处理器,本课题采用LS-Prepost后处理器来观察钢筋在弯曲过程中应力和变形情况。钢筋在弯曲过程中在不同时刻的应力分布如图3所示。
由图3可知:当弯箍转盘转过角度很小、钢筋弯曲角度接近于零时,钢筋产生的最大应力发生在与弯箍转套接触部位,但始终未达到屈服极限值。随着时间的增大,与箍筋模接触部位的应力迅速增大,并很快超过屈服极限值,即进入弹塑性变形阶段。由图3可以看出当时间达到0.004 3s时,与箍筋模接触部位的应力已经非常接近屈服极限值,并且产生的应力最大值逐渐由钢筋的边缘部位向中心部位靠近。
7 结论
1)在弹塑性范围内,利用有限元分析软件可以简便准确地分析钢筋弯曲的变形情况,并与实际结果基本相吻合。
2)钢筋在弯曲过程中,弯曲角度约在5°以内时为弹性变形,之后进入弹塑性变形。
3)钢筋弯曲时内部应力随弯曲时间、弯曲角度的增加逐渐增大,在弯曲时间为0.004 3s时达到最大,之后最大应力值不再变化,最大应力区域由钢筋边缘向中心发展。因此在设计钢筋弯曲机或手工弯曲钢筋时,应注意并非弯曲到要求角度时钢筋内部应力才达到极值。在达到应力极值左右时,应施加合理的弯曲速度与弯曲力。
[1]FORDE PAULSEN,TORGEIR WELO.Applcation of numerical simulation in the bending of aluminium alloy profiles [J].Journal of Materials Processing Technology,1996,58 (5):274-285.
[2]庄萌,王宗纲,钱稼茹.CNP1000安全壳1:10模型的模态分析[J].河北工程大学学报(自然科学版),2007,24 (13):7-11.
[3]胡宝琳,李国强.框架结构层间位移的分析方法比较[J].河北工程大学学报(自然科学版),2007,24(11):17-19.
[4]何涛,杨竞,金鑫,等.ANSYS 10.0/LS-DYNA非线性有限元分析实例指导教程[M].北京:机械工业出版社,2007.
