卫星太阳翼阻尼器参数选定方法
2011-03-14梁小光丁竹生焦映厚陈照波
梁小光,丁竹生,焦映厚,陈照波
(1.哈尔滨工业大学机电工程学院,150001哈尔滨,chenzb@hit.edu.cn;2.中国航天科技集团公司第一研究院第七○二研究所,100076北京)
卫星的太阳翼是航天器提供能源的重要组成部分,由连接架和数块太阳帆板铰接而成[1],卫星发射过程中,它们依靠爆炸螺栓及压紧装置折叠固定在卫星本体的上,当卫星进入运行轨道后,爆炸螺栓将压紧机构打开,太阳翼在铰链间扭转弹簧驱动力矩作用下展开[2],同步展开机构保证太阳翼展开基本同步,当太阳翼展开到预定位时,锁定机构使太阳翼瞬时锁定,由于运动突然停止,从而对卫星本体及太阳翼等与之相直接相连结构产生一定的冲击[3-4],其中最主要的是锁定冲击带来的弯矩载荷,由于真空中阻力非常小,因此锁定过程中将产生一定的冲击载荷,这将对卫星状态产生较大的影响.
本文主要通过在根部铰链处施加阻尼器来减缓冲击载荷及对卫星姿态的影响.通过系统仿真软件ADAMS对太阳翼展开及锁定过程进行仿真分析,分析不同阻尼器参数(位置、数量及阻尼大小)对锁定冲击力矩及卫星姿态动力学的影响,从而提出太阳翼等可展开式结构中阻尼参数的选用方法,为大型可展开式结构的设计提供指导和技术支持.
1 阻尼器概况
黏滞阻尼器是一种耗能装置,它的优点在于只对结构提供附加的阻尼,而不改变结构的刚度,是速度相关型阻尼器,阻尼力(矩)与叶轮转动速度之间近似呈线性关系.因此对黏滞阻尼器的结构与特性参数的研究也成为国内外技术发展的一个热点.根据抑制冲击方式的不同,将阻尼器分为被动式、半主动式两类.根据阻尼器耗能机理的不同,又可将阻尼器分为黏滞阻尼器、机械摩擦阻尼器、磁电流变阻尼器、涡流阻尼器、黏弹性阻尼器、形状记忆合金阻尼器等.黏滞阻尼器是目前应用最广泛,技术最成熟的阻尼器.此外,黏性阻尼器相对于其他阻尼器还具有结构简单,成本较低的忧点.
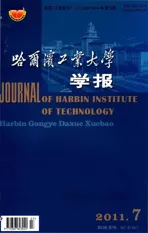
黏性阻尼器的工作原理是通过黏性液体阻尼材料的黏性耗能作用将机构运动过程中的剩余动力耗散掉,从而达到减缓冲击的目的.它一般由机架、转子、叶轮、黏性液体阻尼材料等部分组成.在叶轮与机架内壁间留有缝隙.在叶轮运动过程中,两侧形成压差促使黏性液体阻尼材料通过缝隙由高压腔向低压腔流动,产生阻尼力(矩),使动能逐渐减少,从而达到耗能目的[5].
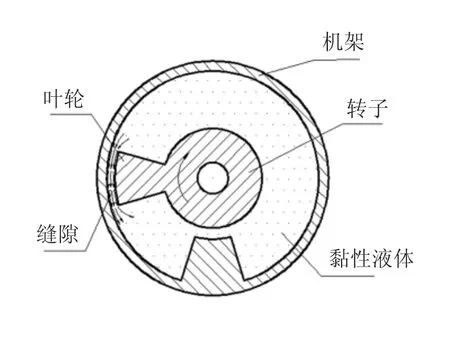
图1 粘性阻尼器
2 卫星系统模型与仿真
2.1 卫星系统模型
如图2所示,卫星系统可分为11个部分:体1为卫星本体,体2和体3分别为南、北连接架,体4~11为太阳帆板,相应地,各体之间通过铰链相连接,铰链编号如图2所示,图中坐标系为右手系,其中X轴为俯仰轴,Z轴为偏航轴,Y轴为滚动轴.航天器在展开过程中可分3种状态(图3): (1)收拢.各太阳帆板及连接架相对卫星本体静止;(2)展开.帆板在弹簧驱动力矩和同步展开机构作用下同步展开;(3)锁定.锁定机构使帆板处于最终展开位置.

图2 卫星系统模型

图3 卫星展开状态
2.2 太阳翼展开各部件在ADAMS中的建模
2.2.1 帆板、连接架及卫星模型
帆板质量为7.68 kg,帆板尺寸为0.8 m×0.4 m× 0.01 m(L×W×D),密度为2.4×103N/m3,杨氏模量为6.0×1010N/m2,泊松比为0.31.在ANSYS软件中对帆板进行建模,由于帆板是柔性体,需要对其进行网格划分,帆板有限元采用4-node-181-element壳单元进行网格划分(如图4所示),然后通过转化,将其转化成中性文件(.mnf),导入到ADAMS软件中进行仿真.连接架质量为1.2 kg,尺寸为0.4 m×0.2 m×0.005 m (L×H×D)(如图5).卫星本体质量为680 kg,在ADAMS中,用0.4 m×0.8 m×0.4 m(L×W×D)立方体代替.

图4 帆板有限元模型
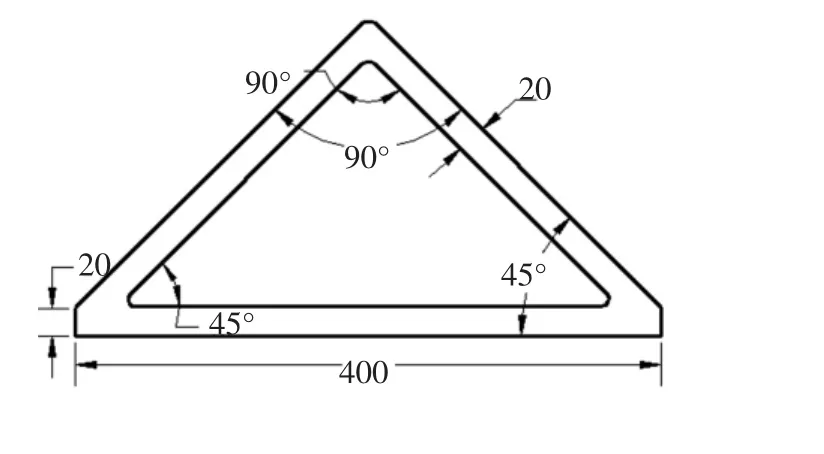
图5 连接架模型
2.2.2 展开同步机构的建模
绳索联动展开同步机构(CCL)(如图6所示)的重要作用是保证太阳帆板同步展开,它对太阳帆板展开过程影响较大,尤其是对帆板运动轨迹、展开时间、以及锁定时产生的冲击载荷影响更大.实际上,绳索联动机构是一种反馈控制系统,为了减小仿真的复杂性,此绳索联动机构控制规律采用线性位置误差反馈控制模型,即

式中,T为绳索力矩,βi、βj为展开角,K为机构等效扭转刚度.

式中,E为绳索的弹性模量,L为绳索长度,A为绳索截面积,r为轮子半径.
图6 绳索联动机构原理
2.2.3 展开驱动机构建模
卫星展开驱动机构的动力为扭转弹簧,其扭矩与展开角度的近似线性关系如下:

其中,T是驱动力矩,θ0为扭簧初始转角,θ是展开角,K是扭簧刚度,Tc为阻尼力矩.
2.2.4 锁定机构建模
如图7所示,凸轮C固定安装在内侧板A上,轴D固定在外侧版B上,凸轮C和轴D之间为转动铰,滑轮E通过弹簧F安装在外侧板B上,当外侧板B展开时带动滑轮E在凸轮C表面上滑动,最终进入槽口G中,与凸轮槽口表面经过数次碰撞后停止相对运动,最终实现锁定[7].
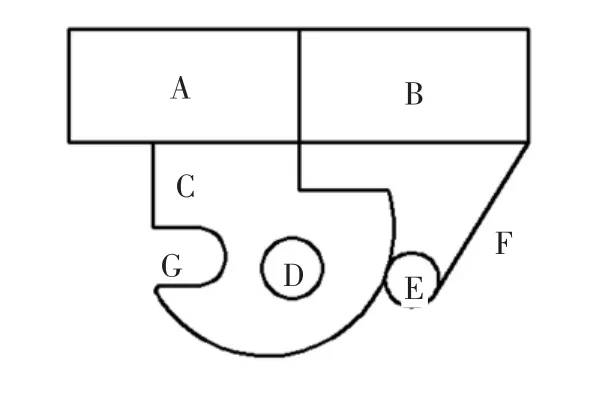
图7 锁定机构原理
本文通过编写时间运行函数来仿真机构的锁定过程.通过定义双面接触力函数和阶跃函数来控制各太阳帆板展开完成时产生接触碰撞力.
双面接触函数[8]Bistop参数变量和数学模型如下式所示:

其中,DZ为位移变量,VZ为速度变量,x1为位移变量的低阈值,x2为位移变量的最高阈值,k为刚度系数,e为刚度指数,c为阻尼系数,d为阻尼增量距离.
阶跃函数Step数学模型[9]如下式所示:

利用以上2个函数最后得到锁定冲击载荷函数如下:

2.3 仿真结果与分析
阻尼器有3种安装方式,分别为四角安装、同侧安装和对角安装,如图8所示.其中单阻尼安装为对角安装,多阻尼安装为四角安装,对于同侧安装将在后面进行讨论.
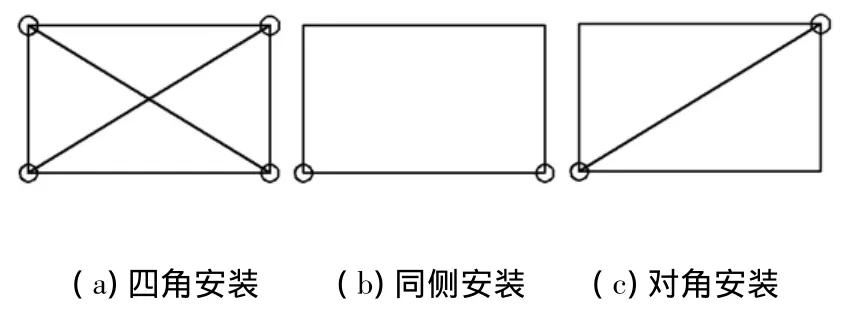
图8 阻尼器安装方式
2.3.1 阻尼器位置的影响
对于本卫星系统模型,阻尼器可以添加在5个位置,如图9所示.阻尼大为20 Nmms/(°)的阻尼器施加在各位置上(单阻尼器安装为对角安装),分析阻尼器安装的最佳位置.仿真结果见图10.
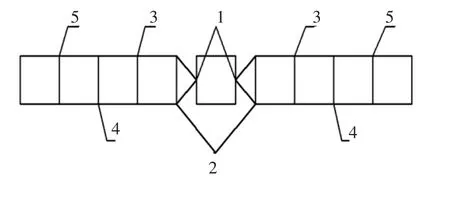
图9 阻尼器添加位置示意图
由图10可知,不同位置施加阻尼器对卫星姿态角产生了明显差异,在各个位置处施加阻尼,姿态角都有明显的减小,其中位置2处最小为0.013 5°,在不同位置施加阻尼器,锁定力矩都有所减小,在位置2~5处施加阻尼器,减阻效果相似,位置2处减阻效果更好些,因此对于卫星施加单阻尼器的情况下,位置2处为最佳位置,抑振效果最好.

图10 不同位置安装阻尼器的响应分析
2.3.2 阻尼器数量的影响
由2.3.1节得出在位置2为阻尼器安装的最佳位置,阻尼器数量是在总阻尼参数不变的情况下,将两个阻尼参数为10 Nmms/(°)阻尼器安装在位置2,与同一位置阻尼参数为20 Nmms/(°)的阻尼器进行分析对比,总结出阻尼器数量对卫星的影响.仿真结果见图11.
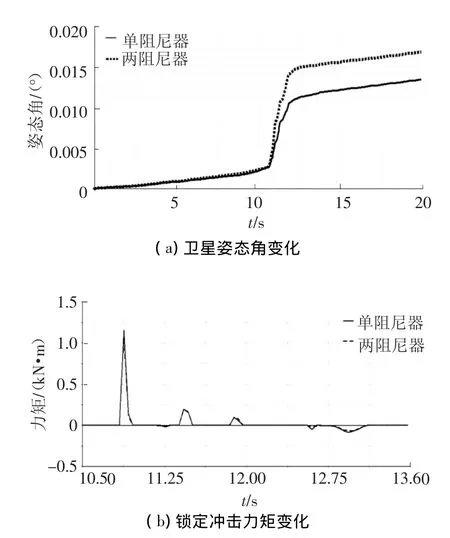
图11 不同数量阻尼器的响应分析
通过图11可知,在总阻尼参数相同的情况下,1个阻尼器姿态角变化为0.0135°,2个阻尼器姿态角变化为0.0169°;各位置的冲力力矩相似.通过综合分析可知单阻尼器为最佳.
2.3.3 阻尼大小的影响
阻尼的大小首先要保证太阳翼能正常展开,本文主要比较 3个阻尼参数,20、40以及 60 Nmms/(°),结果见图12.
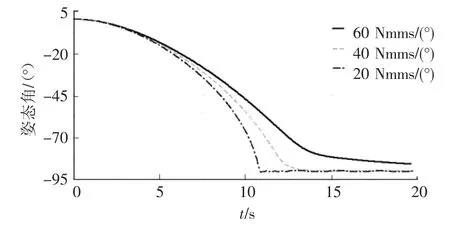
图12 三角架角位移
由图12可知,阻尼为60 Nmms/(°)时,最终展开角度为86°,没有达到90°,因此不能正常展开.而20 Nmms/(°)与40 Nmms/(°)都能正常展开,由图13可知,阻尼越大,卫星姿态角和锁定冲击力矩越小.因此应选择阻尼参数为40 Nmms/(°)的阻尼器.
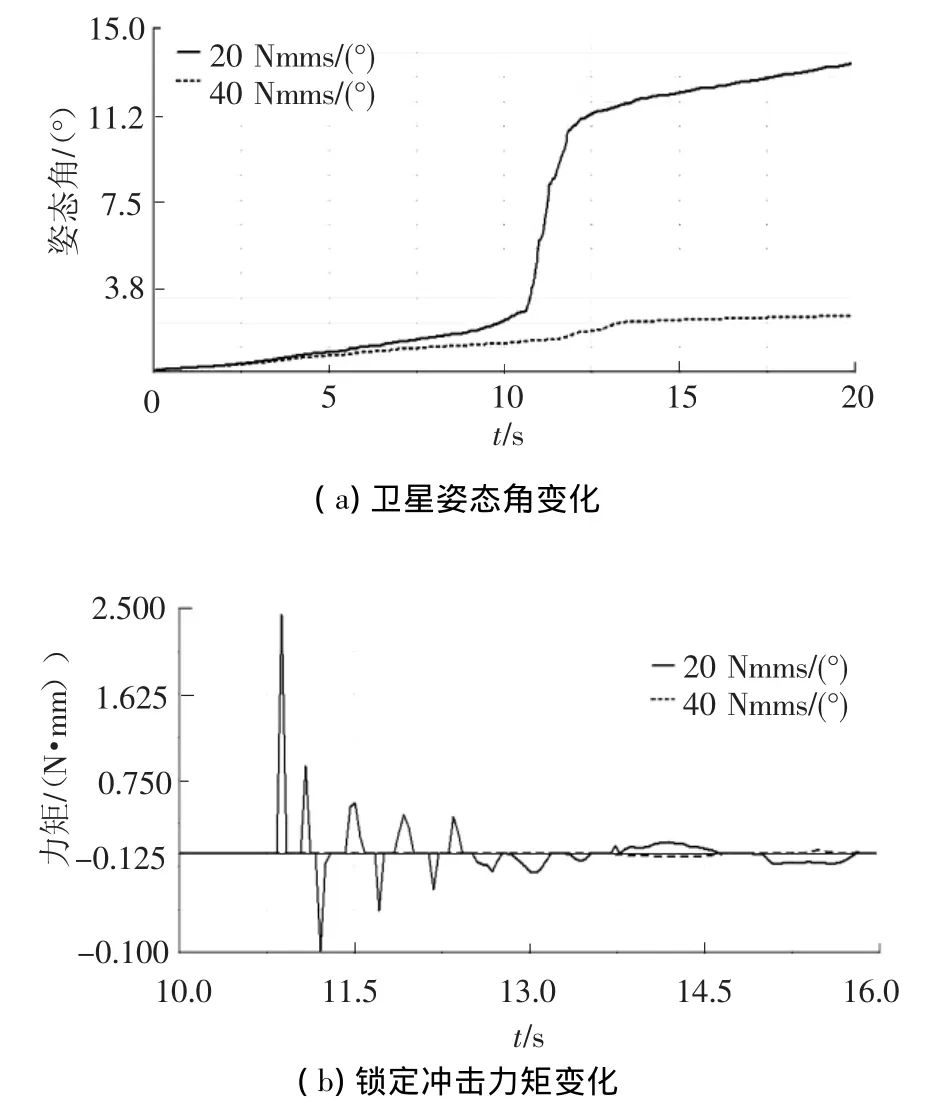
图13 不同阻尼的响应分析
2.3.4 几种特殊情况
(1)卫星帆板两侧阻尼大小不同.
在前面的研究中,卫星帆板的两侧所安装的阻尼器大小均相同,对于阻尼大小不同的情况,将两侧相同的位置上安装阻尼大小分别为20和30 Nmms/(°)的阻尼器,如图14所示,当两侧阻尼大小不同时,卫星的姿态角产生了明显变化,未加阻尼时卫星姿态角为0.076 4°,施加阻尼之后,卫星的姿态角变为6.361 7°.因此在研究过程中,必须保证两侧的帆板的阻尼大小相同.

图14 两侧阻尼大小不同时卫星姿态角的变化
(2)阻尼器同侧安装
在位置2处同侧安装阻尼为20 Nmms/(°)的阻尼器,仿真结果如图15所示,卫星姿态角为0.140 7°,而未加阻尼时卫星的姿态角为0.076 4°,施加阻尼器后卫星姿态角反而增加了.因此对于单阻尼器的安装应该为对角安装.

图15 阻尼器同侧安装时卫星姿态角的变化
3 结论
对阻尼器位置、数量以及大小的分析可知,在位置2处施加一个阻尼大小为40 N mms/(°)阻尼器时为最佳.通过本文分析总结出太阳翼等可展开式结构中阻尼参数的选择方法.
1)阻尼器安装过程中,单阻尼器安装为对角安装,多阻尼的安装为四角安装.
2)阻尼器安装过程中,对称位置阻尼大小要相同,即相对应的位置上安装参数相同的阻尼器.
3)同一个位置安装阻尼器数量越少越好(总阻尼参数一定的情况).
4)阻尼器的阻尼大小必须保证展开机构能够正常展开.当阻尼大小超过一定值时,抑振效果基本不发生变化.
5)对于单位置安装阻尼器,安装最佳位置为连接架与第一块帆板铰链处.
[1]GAO Erwei,ZHANG Xueping,YAO Zhen-qiang.Simulation and analysis of flexible solar panels'deployment and locking processes[J].Shanghai Jiaotong University,2008,13(3):275-279.
[2]白争锋,田浩,赵阳.基于ADAMS航天器太阳帆板展开与锁定动力学仿真[J].机械设计与制造,2006,11(11):124-126.
[3]陈烈民.航天器结构与机构[M].北京:中国科学技术出版社,2005:80-87.
[4]陈烈民.卫星太阳翼展开运动分析[J].中国空间科学与技术,1992,4(2):21-26.
[5]KOLLER F,NITSCHKO T,LABRUYERE G.Viscous rotary damper[C]//Fifth Eropean Space Mechanisms and Tribology symposium.Noordwijk;The Netherlands: European Space Technology Centre,1992:28-30.
[6]王天舒,孔宪仁,王本利,等.太阳帆板绳索联动同步机构的机理和功能分析[J].宇航学报,2000,7 (21):29-33.
[7]WALLRAPP O,WIEDEMANN S.Simulation of deployment of a flexible solar array[J].Multibody System Dynamic,2002,1(7):101-125.
[8]KWAK M K,HEO S,KIM H B.Dynamics of satellite with deployable rigid solar arrays[J].Multibody Syst Dyn,2008,20(1):271-286.
[9]MEIROVICH L,WAK M K K.Dynamics and control of spacecraft with retargeting flexible antennas[J].J Guidance,1990,13(2):314-324.
[10]DANIEL W K.Techniques for using Adams in satellite application[C]//Mechanical Dynamics-Customer Service,16th European MDI User Conference.Adams:mechanic Dynamics-Customer Service,2001:1-8.