基于LabVIEW的音圈电机驱动小角度转台系统辨识方法
2011-03-14赵英伟王省书黄宗升刘士伟
赵英伟,王省书,黄宗升,吴 伟,刘士伟
(国防科技大学 光电科学与工程学院,湖南 长沙 410073)
小角度转台是一种与许多生产实践活动密切相关的设备,在精密加工、半导体器件制造、高清晰显示器件制作以及纳米技术研究等领域都有重要用途[1]。传统的小角度转台多采用电机丝杆驱动,这种驱动方式是将旋转运动转化为直线运动,获得的加速度、速度有限,并且运动惯量大、响应时间长,限制了其精度的进一步提高[2]。因此,直线运动电机已逐渐成为小角度转台的主要驱动电机。
音圈电机作为一种直线运动电机,具有行程大、驱动电压低、运动精度高等诸多优点,适合作为小角度转台的驱动装置。文献[3]中设计了一种基于音圈电机的快速控制反射镜(FSM),其定位精度可以达到角秒量级。
确定小角度转台的传递函数是从频域补偿角度对小角度进行控制的基础。目前,对系统进行辨识的方法主要有:时域响应法、频域响应法、相关分析法等。时域响应法是通过向系统施加一个非周期测试信号获取系统的时域特性,来确定系统的传递函数[4];频域响应法是通过向系统输入一系列频率可变的正弦波信号,记录系统对应频率点的幅值和相位,采用曲线拟合的方法获得系统的传递函数[5];相关分析法则是向系统中输入一定长度的伪随机序列,通过对输入输出信号做一定的相关运算来求取系统的传递函数[6]。这3种方法密切关联,从不同的角度出发反映了同一系统的性质。本文从时域响应法出发,使用相关辨识常采用的伪随机序列作为系统的辨识输入信号,设计了一种基于LabVIEW的系统辨识方法,对音圈电机驱动小角度转台的传递函数进行辨识。
1 小角度转台结构
小角度转台结构示意图如图1所示。转台台面通过弹性支撑与基座相连,两个音圈电机分别安装在弹性支撑两端等距离位置。当电机中有电流流过时,两个电机往相反方向运动,从而使转台产生一定程度的倾角。
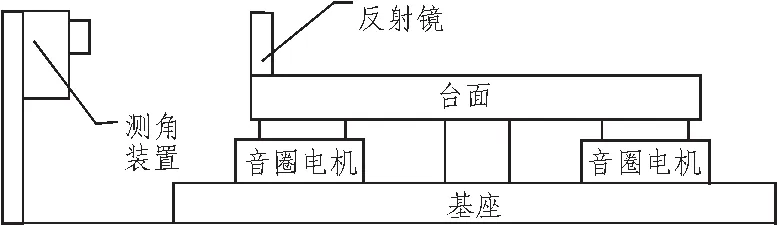
图1 音圈电机驱动小角度转台结构示意图Fig.1 The structural diagram of the small angle turntable actuated by VCM
图 1中转台的运动范围为±10′,测角装置的精度小于2″,用于检测小角度转台的偏转角度。通过转台结构可以看出,该小角度转台为一个单自由度的扭振系统,而音圈电机的电气部分相当于一个L-R网络。因此,从输入电压到输出旋转角度的传递函数可以用一个三阶系统来描述,其传递函数形式如式(1)所示:

从式(1)可以看出,音圈电机驱动小角度转台的传递函数可以分解为一个惯性环节和一个二阶振荡环节的串联。二阶振荡环节主要由机械部分引起,一阶惯性环节主要由电路部分引起。
2 基于LabVIEW的L序列生成方法
最小二乘法对辨识输入有严格要求,即系统的输入信号必须是n阶持续激励信号。常见的信号有:随机序列(如白噪声)、伪随机序列(如M序列或者L序列)[7]等。
由于白噪声的随机特性会引起统计误差造成重复测试的结果不一致,因此,常选用伪随机序列作为系统辨识的输入信号。伪随机序列是一种离散二位式随机序列,每个随机变量只有两个电位,其本质上是一种周期信号,但由于在单个周期内其信号电平是随机的,因此称为伪随机序列。常用的伪随机序列信号包括M序列(最大长度伪随机序列)和L序列(逆重复伪随机序列)。
2.1 M序列生成方法
M序列可以由多级移位寄存器电路产生[8]。整个电路的反馈方式是:某一适当的k0级移位寄存器给出一个反馈信号,与第n级的输出信号经过异或运算后送回到第1级输入端。随着时钟脉冲的逐个输入,n级状态会按一定的规律循环交变,从而得到M序列。M序列的输出端一般放在最高级寄存器的输出端,各级移位寄存器的初始逻辑状态不能全设为0。
移位寄存器的级数与M序列的最大长度满足如下关系:

2.2 L序列生成方法
L序列是M序列与另一周期为2Δ的方波信号u(t)相乘得到的,即:

若用0、1状态分别代表+V和-V电平,则L序列可以认为是M序列与方波信号的0、1交替序列进行异或运算得出的。其生成原理图如图2所示。
由图 2可知,L序列的周期为M序列的两倍,在单个周期内信号均值为零。L序列与M序列相比具有抑制非随机漂移和消除直流分量的优点。
LabVIEW作为一种标准图形化编程工具与NI公司数据采集卡配合使用,可以方便快捷地完成数据采集、输出工作,具有编程简单形象直观的优点[9-10]。因此,用LabVIEW完成L序列的产生以及后续的数据采集工作具有较大的优势。L序列生成程序框图如图3所示。
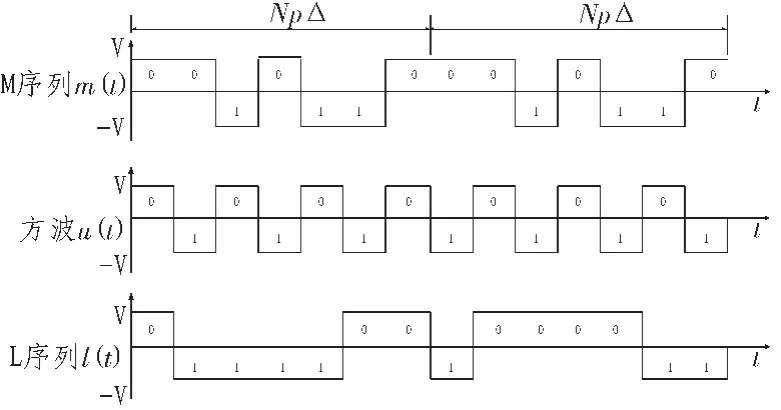
图2 L序列生成原理图Fig.2 The generation principle diagram of L-sequence
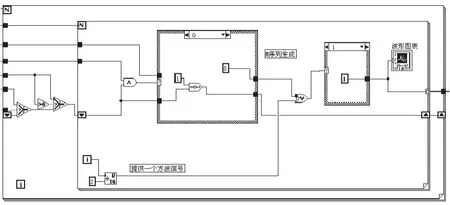
图3 L序列LabVIEW程序框图Fig.3 The program diagram of L-sequence based on LabVIEW
当移位寄存器级数为5,采样数为124时,得到的仿真信号如图4所示。
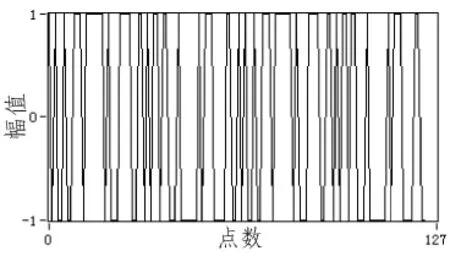
图4 L序列仿真图Fig.4 The simulation diagram of L-sequence
5级移位寄存器生成的M序列长度为31。而由图 2可知,L序列长度为M序列长度的两倍即62。因此,当采样数为124时,可以得到两个周期的L序列伪随机信号,这与仿真得到的结果相符,说明图 3所示的L序列产生方法是可行的。
3 实验结果
使用计算机进行控制时,从AD采集到DA输出,程序在进行数字补偿器运算以及其他处理会带来一定的延迟。AD&DA的频率特性可以用下式表示:

式(4)中,τ为程序延迟时间,T为采样间隔。对于采用扫频进行系统辨识的方法,可以采用在特定频率点剔除式(4)对该频率点幅度和相位影响的方式消除AD&DA环节的影响。但对于采用从时域角度对系统传递函数进行辨识的方法,很难将AD&DA环节从测得的数据中剥离。因此,实验中采用将辨识信号和系统输出信号同时送入计算机处理来消除AD&DA环节的影响。
考虑到转台的最大运动范围,以及充分激励转台等因素,将输出L序列的电平设为±0.6 V。为了最大限度的利用L序列的随机特性,将移位寄存器级数设置为31,采样数设置为128,AD采样间隔为1/2 000 s,采集到的输入输出信号如图5所示。
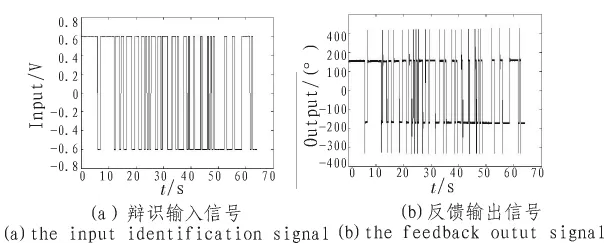
图5 采集到的信号波形图Fig.5 The sampling waveforms
从图 5(a)中可以看出,输入信号电平在小范围内有一定的波动,这主要是由AD&DA采样噪声引起的。电平内峰峰值较小(0.6 mV),因此仍然可以将得到的信号认为是L伪随机序列。从图 5(b)中可以看出,单个角度位置范围内角度有较大的起伏(峰峰值为48″)。在信号电平发生变化的瞬间,输出信号有较大的过冲,这限制了输入信号的电平范围。
4 系统传递函数辨识及验证
运用MATLAB自带的系统辨识工具箱,采用最小二乘法对图6所示的输入输出信号进行辨识[11-12]。根据式(1)所示的传递函数形式将待辨识函数阶数设置为3阶,选择合适的参数初始值和变化范围得到系统的传递函数为:

将激励信号输入辨识得到的传递函数,与原输出信号进行对比,其误差如图 6所示。
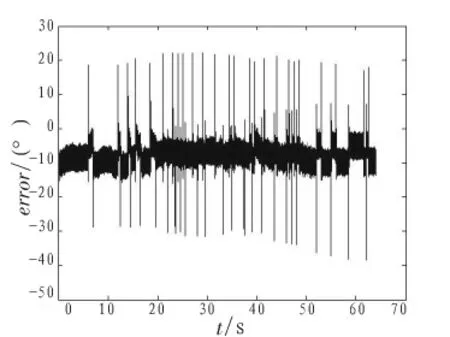
图6 系统辨识误差Fig.6 The diagram of the identification error
从图 6中可以看出,辨识的最大误差为36″,主要发生在信号电平突变位置。而在稳定的信号单电平范围内,信号误差较小(<12″)。误差均方根为4″,说明这种方法具有较高的辨识精度。
为进一步验证该方法的辨识精度,向系统中输入一系列的正弦信号计算输入输出信号的比值,并与式(5)计算的结果进行对比,得到对应频率点的结果如表1所示:
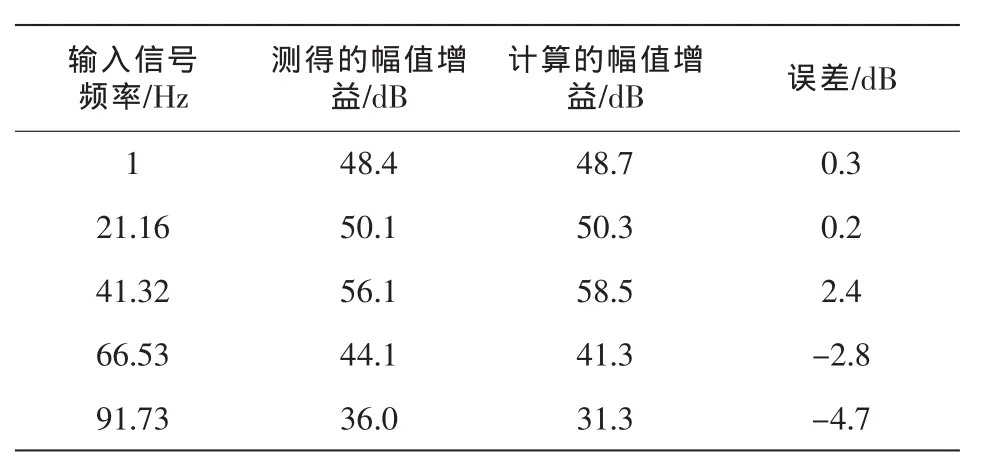
表1 相关频率点的验证Tab.1 The examination of the relevant frequencies
从表1中可以看出,该辨识方法得到的系统传递函数在低频段有较高的辨识精度,而在高频段系统的辨识精度较低。这主要是因为在高频段系统的频率特性比较复杂,机械谐振等环节的存在会对系统的频率特性有影响,而在系统辨识得到的传递函数中没有考虑该环节的影响。
5 结 论
本文设计了一种基于LabVIEW的L序列伪随机信号生成方法,并用该信号对小角度转台的传递函数进行了辨识。辨识结果表明,该方法具有较高的辨识精度,对以后的频率补偿、控制算法设计等方面有一定的指导意义。
[1] 张金龙,刘京南,钱俊波,等.超精密角位移测量与控制技术研究[J].仪器仪表学报,2006,27(12):1738-1741.ZHANG Jin-long, LIU Jing-nan, QIN Jun-bo, et al.Study on ultra-precision angular displacement measurement and controltechnique [J].Chinese Journal ofScientific Instruments, 2006, 27(12):1738-1741.
[2] 冯晓梅,张大卫,赵兴玉,等.基于音圈电机的新型高速精密定位系统设计方法[J].中国机械工程,2005,16(16):1414-1419.FENG Xiao-mei, ZHANG Da-wei, ZHAO Xing-yu, et al.Design method of high speed precision positioning system based on voice coil actuator [J].ChineseJournal of Mechanical Engineering, 2005, 16(16):1414-1419.
[3] 胡浩军.运动平台捕获、跟踪与瞄准系统视轴稳定技术研究[D].长沙:国防科技大学,2005.
[4] 徐宁寿.系统辨识技术及其应用[M].北京:机械工业出版社,1986.
[5] 胡浩军,马佳光,王强,等.快速反射镜系统中的传递函数辨识 [J].光电工程,2005, 32(7):1-10.HU Hao-jun, MA Jia-guang, WANG Qiang, et al.Transfer function identification in a fast steering mirror system[J].Opto-Electronic Engineering, 2005, 32(7):1-10.
[6] 李白男.伪随机信号及相关辨识[M].北京:科学出版社,1987.
[7]罗毅成.经纬仪跟踪转台模型的辨识[D].长春:中国科学院长春光学精密机械和物理研究所,2004.
[8] 张社欣,李江波,杜广超.基于LabVIEW的任意m序列[J].舰船电子对抗,2008,31(1):84-92.ZHANG She-xin, LI Jiang-bo, DU Guang-chao.Random msequence based on LabView [J].Shipboard Electronic Countermeasure, 31(1):84-92.
[9] 罗建强,张伟军.基于LabVIEW软件的音圈电机驱动系统模型辨识方法[J].计算机应用技术,2007,34(2):29-32.LUO Jian-qiang,ZHANG Wei-jun.The system identification approach of voice coil motor driving system based on LabVIEW software [J].Computer Application Technology,2007, 34(2):29-32.
[10] 2005-2006 National Instruments Corporation.LabVIEWTMHelp.371361B-01,August 2006.
[11] Tsai Ming-fa,Tzou Ying-yu.Design and implementation of a real-time identification system using parallel processing adaptive control of a DC motor drive[C]//IEEE.1995.
[12] Wei Xing-zheng.Least-squares identification of dynamic systems in closed loop [C]//Proceedings of the 39th IEEE Conference on Decision and Control,2000.
