测站天线目标自动捕获跟踪设计要点
2011-03-14侯锦余军
侯锦,余军
(1.中国电子科技集团公司39所陕西西安710065;2.西安卫星测控中心陕西西安710043)
随着我国航天事业的发展,近年来国家先后研制和生产了一批用于载人航天等工程任务需求的测控设备[1],控制中心要对各个测控设备进行远程统一管理和调度,实现设备的远程自动化运行,如何提高设备自动化运行能力这一问题显得日益突出。目前,已有数套测控设备实验性地采用了自动化运行技术,在设备自动化运行调试过程中,发现和解决了一系列影响设备远程自动化运行的问题。本文将针对天线控制部分自动化运行的设计流程进行讨论,对于影响自动化运行中目标自动捕获跟踪设计中主瓣识别、跟踪维护以及遮蔽容错维护等问题进行分析,进而提出行之有效的实施方案。
1 测站天线控制部分自动化运行流程设计概述
测站天线控制部分自动化运行软件流程设计的主要依据是原来人工操作的运行流程。传统人工操作按照任务或长管的时间区间划分为设备标校和卫星轨道的计算、天线放置等待位置、卫星目标的捕获跟踪以及跟踪结束后停止天线运转并进行数据整理4大方面。
依据需求,在自动化运行中测站的各个设备需要协调工作,由设备监控单元(SMCU)制定或通过网络向各个分系统分发工作计划并提供统一的调度。设备的工作流程可划分为任务准备阶段、任务开始、目标跟踪与维护阶段和任务结束几个子流程,对应于各个子流程产生时间驱动的工作计划。在目标跟踪阶段中由天线控制单元(ACU)自动完成目标的识别和捕获跟踪,这是自动化运行中对天线控制单元的智能化和容错能力的设计重点。
2 天线系统的硬件组成
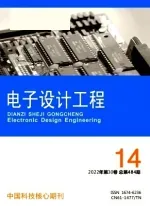
目前测站的天线系统的硬件组成如图1所示,主要由天线射频设备、天线控制设备、天线结构设备和基带设备(含跟踪接收机)以及标校设备等组成[2]。ACU接收来自基带接收机设备的锁定信号、自动增益控制(AGC)电压作为跟踪进入的判断条件,误差电压作为跟踪运行时的位置闭环的误差信号[3]。
3 目标自动捕获跟踪及跟踪容错的软件设计要点
由于自动化运行中目标的识别和捕获跟踪由人工更改为程序自动捕获转入跟踪,因此如何判断目标出现、判断目标进入主瓣、切入跟踪方式和防止误跟踪是目标捕获跟踪程序设计的要点,其中主瓣识别和防止副瓣跟踪以及跟踪过程中的容错维护是程序设计的难点。
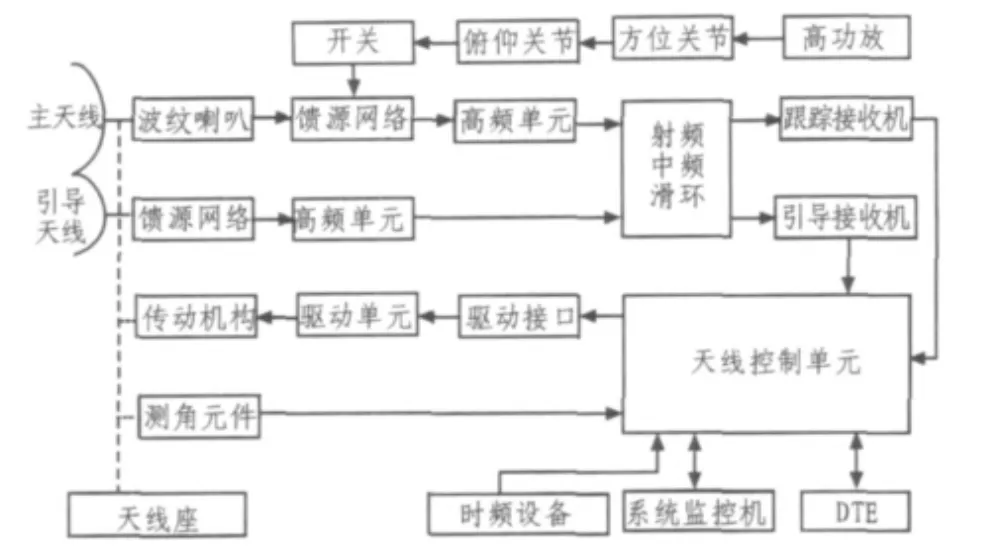
图1 天线系统组成框图Fig.1Block digram of antenna system
3.1 主瓣识别设计
传统的人工主瓣识别由操作手根据经验设定AGC跟踪门限,当目标AGC电平高于该门限认为是目标进入主瓣,可切入跟踪。在自动化运行下为了避免AGC电压的非线性,真实反映信号的信号强度,可使用与AGC对应的S/Φ进行判断,即当目标的S/Φ高于设定的主瓣门限则认为目标已进入主瓣,可以切入跟踪。S/Φ的标定一般由基带设备自行标定,并通过参数数组装订至天线控制软件。
常规的解决方法是对于使用引导天线的天线系统,利用引导天线的S/Φ与主天线的S/Φ一同参与主瓣识别,即主天线的S/Φ应固定比引导天线的S/Φ高出某一门限值,该门限为系统的设计值,由两个天线的增益决定。对于没有引导天线的系统则使用标定的门限进行判断。在自动化运行下,两种天线系统的门限值均由SMCU下发至ACU。但是在实际运行中,在信道和基带设备组合较多以及信号衰减程度不同的情况下,门限的标定和调用可能存在误差,仅用标定的门限不能最大程度的保证识别结果正确。
因此要对上述方法进行优化,由于引导天线的波束范围是主天线的数倍乃至十倍,如图2所示,引导跟踪零点与主天线零点基本重合[3],因此在发现目标进入跟踪上比主天线有很多优势,因此对于使用引导天线的天线系统,可以使用引导天线闭环一同参与主瓣识别,即在主瓣识别之前先进行引导天线的跟踪闭环,再进行主瓣判断,满足主瓣条件转入主天线的跟踪闭环,这种方法比单纯的使用主天线接收机S/Φ与引导天线接收机S/Φ之差满足设定门限有着更高的准确性,可大大提高主瓣识别的成功率。
对于没有引导天线的天线系统,为了提高主瓣识别的准确性则可采用公式(1)实时计算目标主瓣内的S/Φ值,计算公式为:

其中,GT值为主天线的增益;EIRPS为卫星的有效辐射功率;R为目标距离测站的距离;f为工作的点频;K为波尔兹曼常数;
通过实时计算目标当前S/Φ值与公式实时计算的主瓣S/Φ值相比来确定目标是否进入主瓣可以切入跟踪。
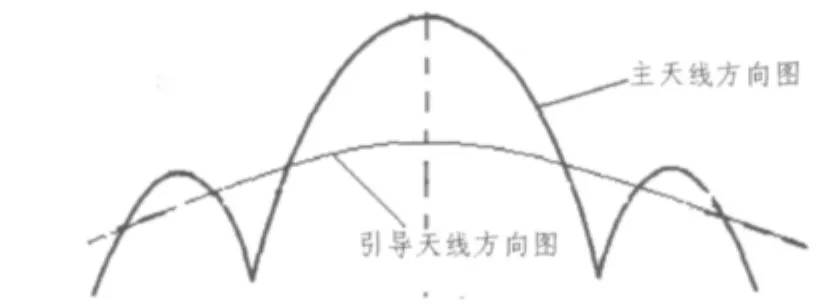
图2 主天线和引导天线方向图Fig.2Directional graph of main and antenna pattern
图3 主副瓣方向图Fig.3Directional graph of main-lobe guide and side-lobe
3.2 跟踪容错维护
有了主瓣识别方法,就可以据此进行目标的捕获和跟踪,为了最大限度地避免系统处于副瓣跟踪[4]和误跟踪,要对跟踪进行容错维护。当目标判定进入主瓣时,程序先进行跟踪闭环一段时间如2~3 s,在这段时间内采集跟踪的各个状态以判断跟踪质量是否满足要求即是否准确进入了主瓣跟踪。
对于跟踪质量监测,软件采集的状态主要有AGC电压、方位和俯仰的误差电压以及锁定信号,方位、俯仰误差电压的平方和的均方根可表示为天线电轴偏离目标映射在空间位置,主瓣跟踪时该值应趋近于0[5];在副瓣跟踪时,由于系统差零深的斜率变化,如图3所示,系统环路的增益将发生变化,跟踪时误差电压比主瓣跟踪时的特性要差。因此若误差电压特性不满足要求且AGC信号的迅速跌落则认为跟踪至副瓣;锁定信号的失锁可以认为目标已经丢失,这些均可认为目标捕获失败,需要进行目标的重新捕获。
由于AGC、误差电压和锁定信号均来源于基带设备,基带设备的信号通过天线系统接收,再经过信道和变频,除了副瓣信号质量不满足要求以外,若目标信号异常或者整个通路设置错误、出现故障也可导致误差电压等信号的异常,但这种情况下目标反复捕获都不能满足跟踪质量,将会引起天线反复捕获,因此要对于目标捕获次数进行限制,以免程序控制天线在反复捕获目标的过程中。
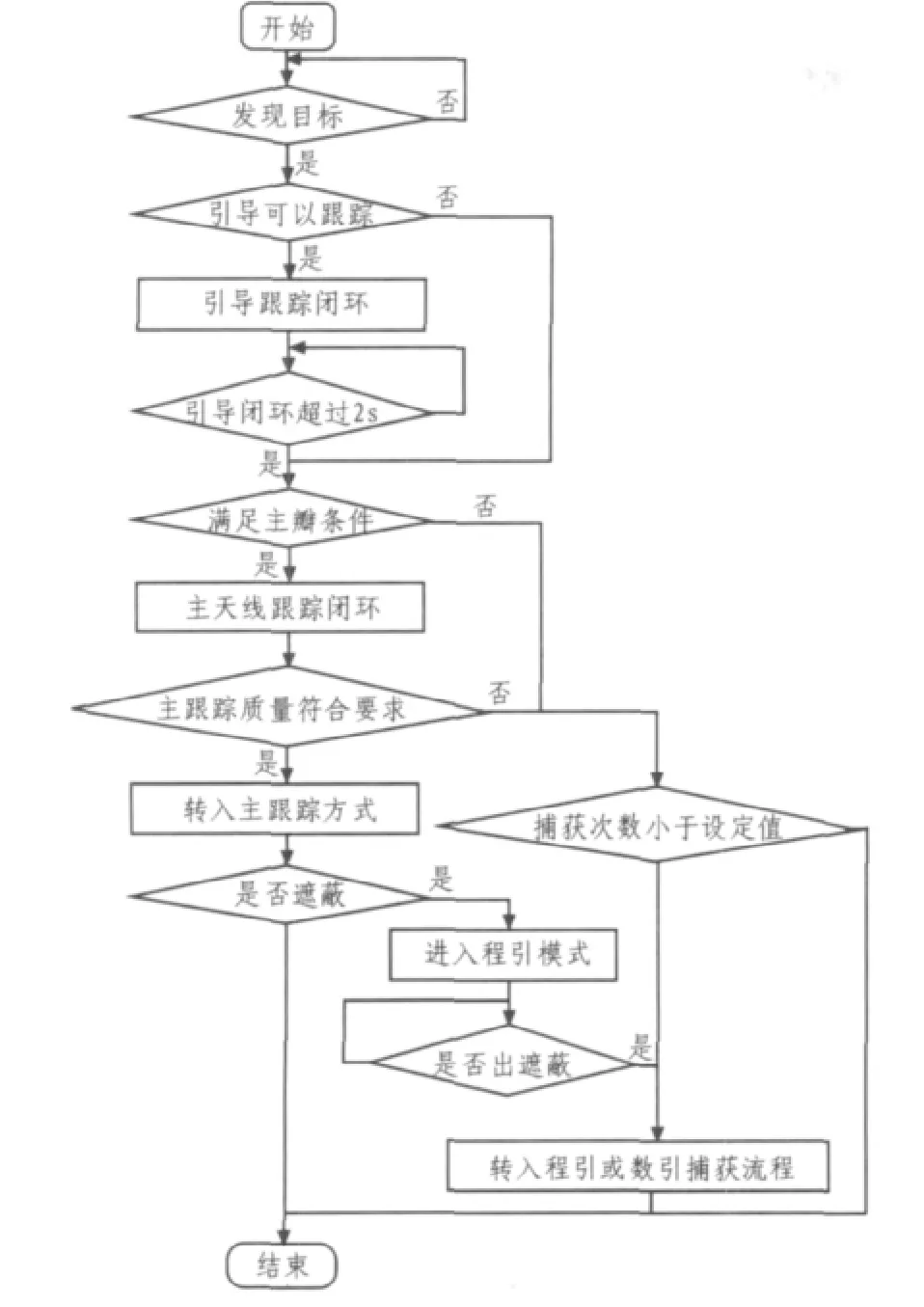
图4 程序流程设计Fig.4Flow chart of software design
在目标的跟踪维护流程中还需要考虑遮蔽的影响,在某些测站的跟踪弧段内存在建筑物或者山体对目标信号造成遮挡,引起信号衰弱或者丢失,因此程序必须提前知道目标进入和离开遮蔽的位置,以便做出正确的处理。在目标跟踪过程中程序需要实时计算目前方位角度下的俯仰遮蔽状态,如遇遮蔽且天线处于跟踪状态,则将天线运行方式由跟踪切入程引或者数引,待遮蔽状态消失后,进行目标的重新捕获流程,满足跟踪条件则重新进入跟踪状态,因此目标捕获和跟踪容错处理程序采用图4所示的流程进行设计。
4 结束语
笔者参加了近几年新研、改造的测控设备的自动化设计和现场联试[6],文中提及的问题为天线控制设备自动化现场联试目标捕获与跟踪遇到的关键性问题,通过对问题的机理进行了分析总结,设计相应的算法对这些关键性问题予以解决,并应用于某12 m测控天线,实践证明这些方法可提高测控设备天线控制设备的目标捕获和跟踪的成功率,有效地避免副瓣跟踪,保证自动化运行可靠性和效率。希望本文提及的方法对后续设备的自动化运行提供有益的参考信息。
[1]鲁尽义.航天测控系统测角分系统[M].西安:中电科技集团公司39所,2006.
[2]夏福梯.防空导弹制导雷达伺服控制[M].北京:宇航出版社,1996.
[3]周朝栋,王元坤,杨恩耀.天线与电波[M].西安:西安电子科技大学,1994.
[4]李萍,张林让.精密跟踪雷达伺服系统的设计与仿真[J].电子科技,2007(4):54-56.LIPing,ZHANGLin-rang.Designandsimulationof precision tracking radar antenna servo system[J].Electronic Science and Technology,2007(4):52-56.
[5]沈民谊.卫星通信天线、馈源、跟踪系统[M].北京:人民邮电出版社,1991.
[6]顾绳谷.电机及拖动基础[M].北京:机械工业出版社,1994.