基于虚拟仪器的车辆称重传感器的分析
2011-03-14张宁
张宁
(商丘师范学院物理与信息工程系,河南商丘476000)
虚拟仪器(Virtual Instrument,简称VI)是日益发展的计算机硬、软件和总线技术在向其他相关技术领域密集渗透的过程中,与测试技术、仪器仪表技术密切结合共同孕育出的一项全新的成果。由于仪器的专业化功能和面板控件都是由软件形成,因此国际上把这类新型的仪器称为“虚拟仪器”。它是利用微机的数据处理和图形处理功能,将传统物理仪器的专业化功能和面板控件软件化,与检测数据间的接口也通过计算机软件来实现。从虚拟仪器显示面板(如虚拟显示屏、数码显示器和指示灯及示波器等,其在功能上与各种物理仪器相对应)可了解仪器的状态,读取测试结果进行分析[1-2]。
1 车辆称重传感器概述
本文根据虚拟仪器的特点,利用电容称重传感器的车辆载荷检测装置,以车辆缓冲减振机构中的板弹簧作为称重传感器的弹性体,可随时随地进行静态或动态检测。在载荷作用下,汽车的缓冲减振机构(板弹簧)产生变形,安装在特定位置电容传感器两极板间的距离发生变化,电容值变化,传感器的输出电压也随之发生变化[3]。基于虚拟仪器从测试静态性能的参数分析入手,分析在车辆静止时货物变化时电容传感器两极板间电压变化的规律,为测试动态性能作参考。对特定的载荷对应的电压值进行分析,用虚拟仪器程序子VI的来进行误差分析和曲线拟合,既方便又直观。电容称重传感器的安装如图1所示。
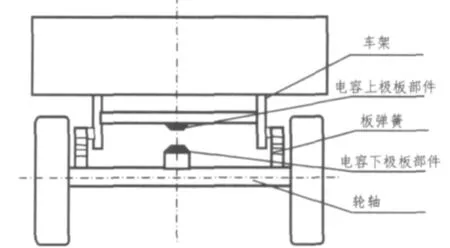
图1 电容称重传感器示意图Fig.1Diagram of capacitance weighing transducers
电容上极板部件安装在车架下部,左右居中;电容下极板部件安装在轮轴中部的上方,与电容上极板上下对正。车辆的每根轮轴上方均安装一套电容传感器。
车辆称重系统各元素之间的关系如下:
在载荷作用下,汽车的缓冲减震机构(钢板弹簧)产生变形,电容传感器两极板间的距离d发生变化,传感器的电容值也随之变化。预先标定出传感器电路输出电压值与该轮轴载荷值之间的关系,以后就可以根据各轮轴传感器电路的电压值得到该轮轴的载荷质量。将各轮轴的载荷质量相加,可以得到整车载荷质量[4-5]。
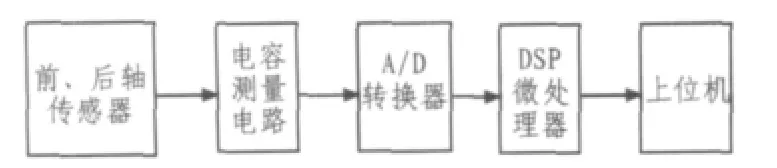
图2 系统组成部分Fig.2Component of system
2 试验及数据分析
基于虚拟仪器的电容法检测车辆载荷的静态分析试验是在黑豹SM1010型汽车上进行。该车辆为两轴钢板弹簧结构,额定载荷为500 kg。静态实验过程中保持车辆处于水平状态,两轮分别垂直压在SCS-2型电子数字平台秤上。以100 kg砝码作为标准单位载荷,对车辆装载或卸载。试验分为两个行程(每行程又包括正反两个方向),按照如下顺序装载或卸载:
正向1——在车辆自由状态下(无迟滞),自空载逐渐装载,直到传感器输出达到满量程;
反向1——在正向1的基础上,逐渐卸至空载;
正向2——在反向1的基础上(有迟滞),自空载逐渐装载,直到输出再次达到满量程;
反向2——在正向2的基础上,逐渐卸至空载。
根据试验数据,分别求出两个行程正反向传感器输出的算术平均值再求出总进程算术平均值。经虚拟仪器编程软件LabVIEW平台下编程显示,程序框图前面板如下。
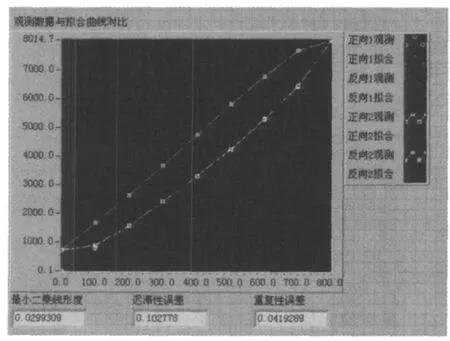
图3 系统程序前面板Fig.3The program’s front panel of system
软件编程采用模块化设计,主要包括曲线拟合模块、直线拟合和误差分析模块等。误差分析模块中的最小二乘线性度、迟滞性误差以及重复性误差都采用子VI的形式,这为动态参数的分析编程提供了很大的方便。误差处理模块主要是在分析数据的过程中,对数据的重复性误差、最大标准偏差和迟滞性误差等进行分析处理。这些数据为后续的数据处理和电容称重传感器补偿系统编程作为依据,如重复性误差编程如图4所示。
为了掌握加速度对电容法车辆载荷检测的影响情况,根据预先标定出的载荷质量与电容传感器输出电压之间的对应关系,得到某一加速度(aH)下前、后轮轴以及整车的载荷质量,结果见表1。
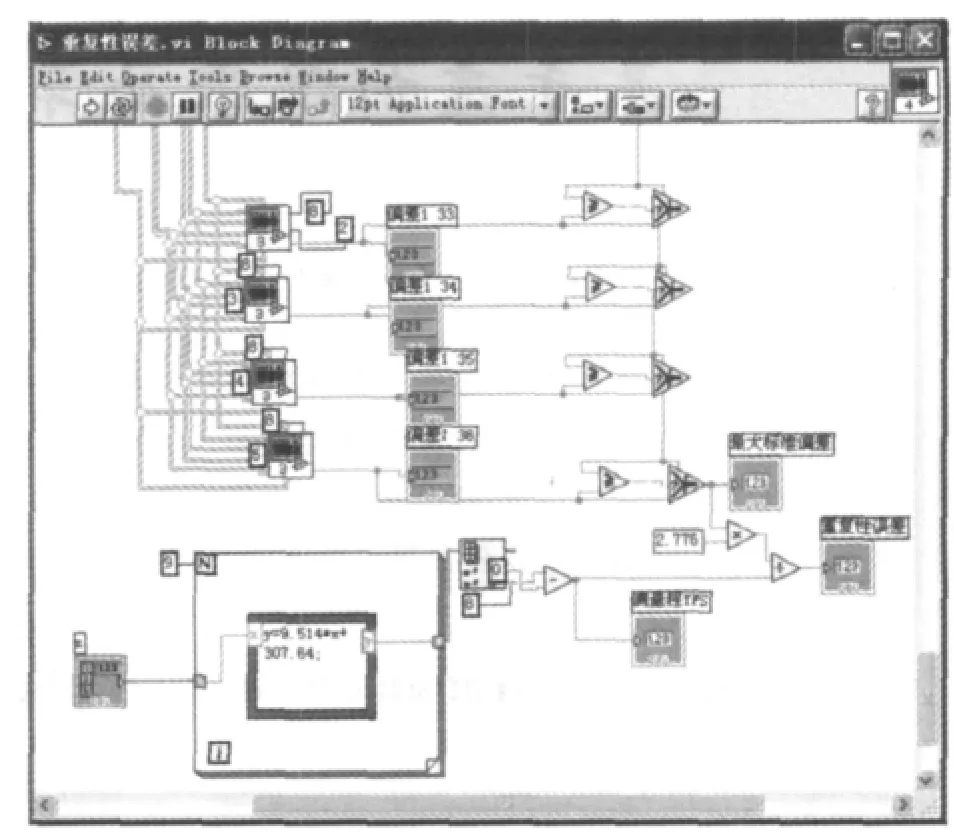
图4 部分处理模块程序Fig.4Processing module program
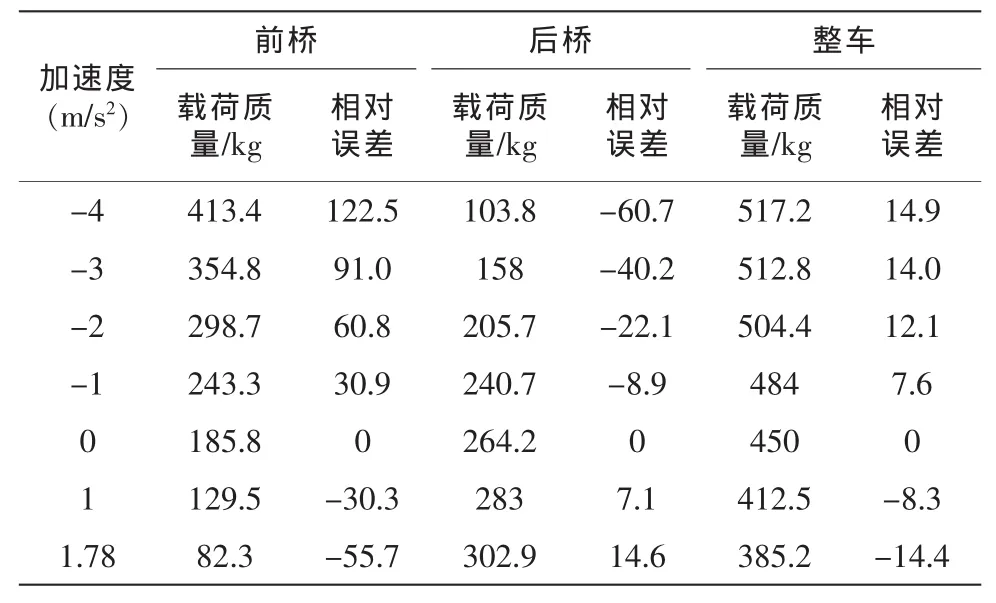
表1 不同加速度下的载荷质量及相对于aH=0时的误差Tab.1 The error under load mass and different acceleration with aH=0
从表中数据可知:制动过程中,加速度aH=-4 m/s2与aH=0时相比,电容传感器检测到的前轴载荷质量增大了122.5%,后轴减小了60.7%,整车载荷质量增大了14.9%;加速过程中,加速度aH=1.78 m/s2与aH=0时相比,前轴载荷质量减小了55.7%,后轴增大了14.6%,整车载荷质量减小了14.4%。由此可见,加速度对车辆载荷检测的影响很大,为了保证检测结果的准确性,必须利用软件补偿。
根据表1中的数据绘制出的载荷质量与加速度之间的关系曲线见图5。
由以上分析系统显示结果可知,电容式车辆称重装置静态时具有较好的重复性,但也存在着一定的非线性误差及较大的迟滞性,直接影响着载荷检测结果。引起非线性误差的主要原因是电容相对变化量与极板之间的非线性的关系。而引起迟滞(包括反向行程不归零)的主要有两方面的原因:1)真实材料都在一定程度上存在迟滞现象;2)车辆载荷大小不同时,钢板弹簧的高度和长度随载荷而变化,弹簧片之间产生摩擦,弹簧片两端与车架连接处也产生摩擦。采用高弹性材料的钢板弹簧、改进机械设计、减小摩擦等办法可减小迟滞影响。而利用软件方式进行非线性补偿及迟滞性补偿效果十分明显[6]。
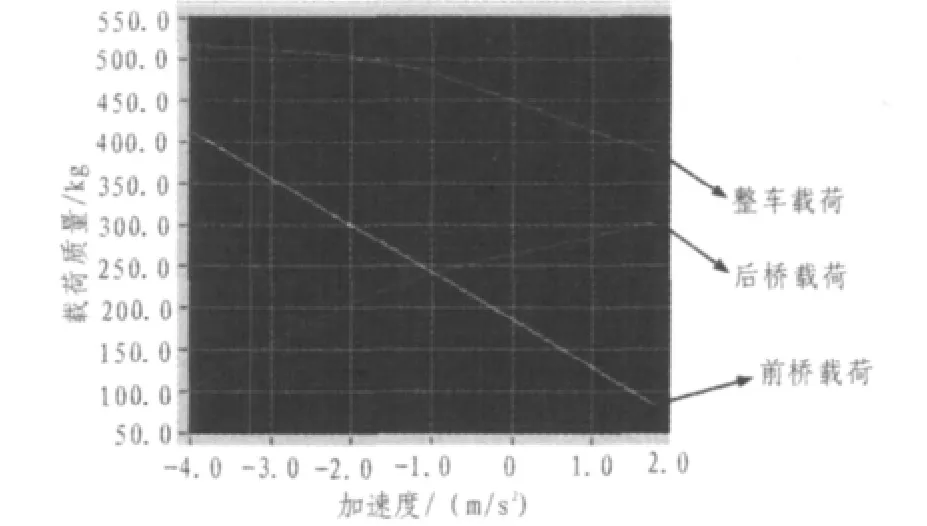
图5 载荷质量与加速度的关系曲线Fig.5Curves of load mass and acceleration
3 结束语
基于虚拟仪器的车辆称重分析系统,具有操作方便,用户界面友好,易编程等特点,尽管虚拟仪器没有真正的仪表面板,但在功能上却远胜于传统物理仪器。实践证明基于虚拟仪器的车辆称重系统不仅适合于电容法检测车辆载荷静态测量分析,同时更适合于数据量更大的动态测量分析。本文的创新点在于利用虚拟仪器的软件面板对电容法检测车辆载荷静态测量进行误差分析,不仅摆脱了那种列表统计易出错的缺点,而且结果方便快捷直观。
[1]杨乐平,李海涛,赵勇,等.LabVIEW高级程序设计[M].北京:清华大学出版社,2003.
[2]章蔚中,王颖.虚拟温度测量系统设计[J].微计算机信息,2007,23(9):159-160.ZHANGWei-zhong,WANGYing.Thedesignofthe temperature measurement system based on virtual instrument[J].Microcomputer Information,2007,23(9):159-160.
[3]栾桂冬,张金铎,金欢阳.传感器及其应用[M].西安:西安电子科技大学出版社,2002:38-43.
[4]赵纲领,蔚永强,张宁,等.基于DSP I/O口的多路高速数据采集系统设计[J].电测与仪表,2007(2):54-56.ZHAO Gang-ling,YU Yong-qiang,ZHANG Ning,et al.A multi-channel high speed acquisition method based on DSP I/O port[J].Electrical Measurement&Instrumentation,2007(2):54-56.
[5]赵纲领,张宁,杨三序.基于AD7891的车辆称重采集系统设计[J].电子设计工程,2009(6):104-105.ZHAO Gang-ling,ZHANG Ning,YANG San-xu.Design of vehicle weighing data acquisition system based on AD7891[J].Electronic Design Engineering,2009(6):104-105.
[6]张毅,周绍磊,杨秀霞.虚拟仪器技术分析与应用[M].北京:机械工业出版社,2004.
[7]贺庆之,贺静.单一平面电容传感器原理与应用[J].工业仪表与自动化装置,2001(5):62-65.HE Qing-zhi,HE Jing.The principle and application of a single planar capacitance sensor[J].Industrial Instrumentation&Automation,2005(50):51-52.