鱼雷发射装置气缸法兰变形测量技术
2011-03-07方国强王红华杨宗元
方国强,王红华,杨宗元
(1.海军装备部,北京100841;2.武汉第二船舶设计研究所,湖北武汉 430064)
0 引言
由于海水压力的变化,潜艇耐压壳体会随深度的变化而产生不同的变形。在鱼雷发射装置汽缸活塞杆穿越潜艇耐压壳体的情况下,如果耐压壳体变形较大则可能使得气缸活塞卡死,从而影响鱼雷的顺利发射。因此,测量不同深度下发射装置气缸前端面法兰相对于耐压隔壁之间的径向变形量,对评估潜艇在不同深度下的鱼雷发射环境具有参考价值。
1 测量方案及其原理
在发射鱼雷过程中,高压气体注入气缸,推动气缸活塞杆向前移动,形成发射动作。高压气体压入气缸并推动活塞杆的过程,可能受到影响的因素有气缸和活塞杆的制造及装配工艺不理想、艇体变形等。
根据鱼雷发射装置相关部位总体结构特点,为了便于分析,排除影响发射的次要因素,现作如下假设:
1)安装在耐压隔壁焊接件上的高精度定位标相对焊接件之间的位置关系在艇下潜过程中不会发生变化,定位标的位置变化等同于焊接件的变化。
2)在艇下潜过程中安装在气缸缸体上的激光测量系统相对缸体之间的相对位置关系不会发生变化。
3)由于只关心不同下潜深度相对水面状态下的变形,可以认为水面状态下焊接件上定位标以及推杆状态为初始理想状态,即水面条件下焊接件和气缸之间的初始装配误差。
1.1 坐标系构建及转换
如图1所示,艇处于水面状态,在耐压隔壁焊接件和气缸上分别安装高精度定位标和激光测量系统。在激光测量系统坐标系xyz下对圆柱状推杆进行扫瞄测量,并测量出定位标在坐标系xyz中的精确坐标O(xO,yO,zO)。
在专用数据处理软件中构建虚拟目标:
1)根据激光测量系统对推杆的扫瞄数据在软件中构建坐标系xyz下的推杆轴线L1;
2)过O点构造出垂直于直线L1的平面P;
3)在平面P内构建一个不同于O点的点A(xA,yA,zA);
4)过O点构建垂直于平面P的直线L2。
根据直线L2可以确定向量r1。,根据A点和O点坐标可以确定向量r2={xA-xO,yA-yO,zA-zO} ={xAO,yAO,zAO},则可以求出另外1个向量r3:

同时可以得到3个向量r1,r2和r3的方向余弦:
由向量r1,r2和r3构建坐标系Ox'y'z',其中原点为O点,z'轴方向对应向量r1方向,x'轴方向对应向量r2方向,y'轴方向对应向量r3方向。继而可以得到坐标系Ox'y'z'相对于xyz的坐标系变换方程:

1.2 目标量解算
潜艇下潜至某一预定深度时测量出定位标在机器坐标系中的精确坐标,根据方程(1)解算出此时定位标在坐标系x'y'z'中的定位数据为(a1,b1,c1),则该深度条件下相对于水面状态下径向变形量为:
2 误差分析
由于深潜过程中艇的状态比较复杂,在此对主要的误差源进行分析。
2.1 激光测量系统单点测量误差
根据测量方案,基准平面及气缸法兰的位置都是利用激光测量系统-高精度定位标组成的测量系统构造出来的,因此,激光测量系统对4个定位标的单点测量误差对总的测量误差起着重要作用。
已知激光测量系统的单点测量精度为5 ppm。由于各个定位标与激光测量系统的距离并不一致,因此其测量误差也是有差别的。为了简单起见,其测量误差按如下处理:坐标系构造平台上的3个定位标与激光测量系统的距离均有d0≤2 m,因此其测量误差

气缸法兰处的定位标与激光测量系统的距离d1=457 mm,其测量误差
其中,气缸法兰处的定位标位置的测量误差会造成最终测量结果的等量误差。
2.2 坐标系构造误差
利用激光测量系统测量坐标系构造平台上的3个定位标来构造坐标系时,由于激光测量系统存在测量误差,所构造的坐标系也会存在误差。这种误差的组成比较复杂,这里仅讨论极限情况。
从坐标系构造原理可知,当3个定位标沿坐标轴x,y,z的测量误差分量方向相同时,其构造的坐标系与目标坐标系之间存在平移误差,称为坐标系平移误差;当3个定位标沿坐标轴的测量误差不一致时,其构造的坐标系与目标坐标系之间存在旋转误差,称为坐标系旋转误差。
坐标系平移误差等于激光测量系统单点测量误差。从测量原理可知,坐标系沿基准平面的平移误差Epy会造成相对变形测量结果的等量误差,而此平移误差仅为坐标系平移误差的一部分(沿z轴的平移误差对测量结果没有影响),因此有:

坐标系旋转误差不仅与激光测量系统单点测量误差有关,还与定位标间距有关。如图2所示,设A和B为2个定位标的真实位置,A'和B'为2个定位标的测量位置,AB间距为s,则由激光测量系统单点测量误差导致的坐标系偏摆角度为


图2 坐标系偏摆误差示意图Fig.2Coordinate system rotational error
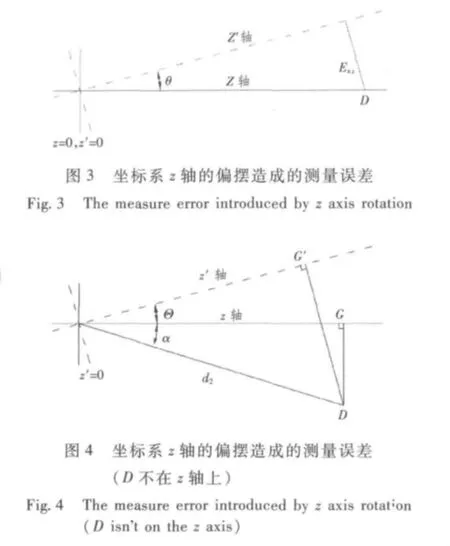
坐标系偏摆包括坐标系x轴、y轴和z轴的偏摆。其中坐标系z轴的偏摆(注意,不是绕z轴的偏摆)对测量结果的影响最大。如图3所示,z轴代表真实的基准坐标系轴线,z'=0代表测量得到的基准坐标系轴线。设气缸法兰处的定位标位于z轴上,则Exz表示由于坐标系z轴偏摆引起的气缸法兰径向位移测量误差。设气缸法兰处的定位标距基准平面的距离为d2,则有

当D不在z轴上时(如图4),坐标系z轴的偏摆造成的测量误差:


故总的坐标系构造误差为

2.3 坐标系构造平台安装误差
根据测量原理的要求,坐标系构造平台上3个定位标所在的平面(基准平面)应与耐压隔壁焊接件的轴线垂直。由于坐标系构造平台的安装精度有限,测量方案中采取了利用定位标构造出气缸推杆的方向,对坐标系构造平台的安装误差进行了补偿。但误差补偿只能使误差减小,而不能完全消除误差。
如图5,设z=0表示真实的基准平面,z″=0表示误差补偿后的基准平面。2个平面的偏差为β,D和D'表示气缸法兰水面及下潜后的位置,则坐标系构造平台安装误差造成的测量误差为:
图5 坐标系构造平台安装误差Fig.5The measure error introduced by coordinate consturct platform

由于经补偿后的基准平面的误差为秒级,在此设为1',试验过程中气缸法兰的位移不到10 mm,故有

可见,基准平面的构造误差对测量结果的影响很小。
2.4 总测量误差
从以上分析可知,气缸法兰径向位移的总测量误差为

从测量误差的组成来看,坐标系旋转误差对气缸法兰的径向位移测量结果影响最大,而从误差分析的结果可以看出,坐标系构造定位标组与激光测量系统的距离以及定位标之间的最小间距是决定该误差的主要因素。
3 试验结果
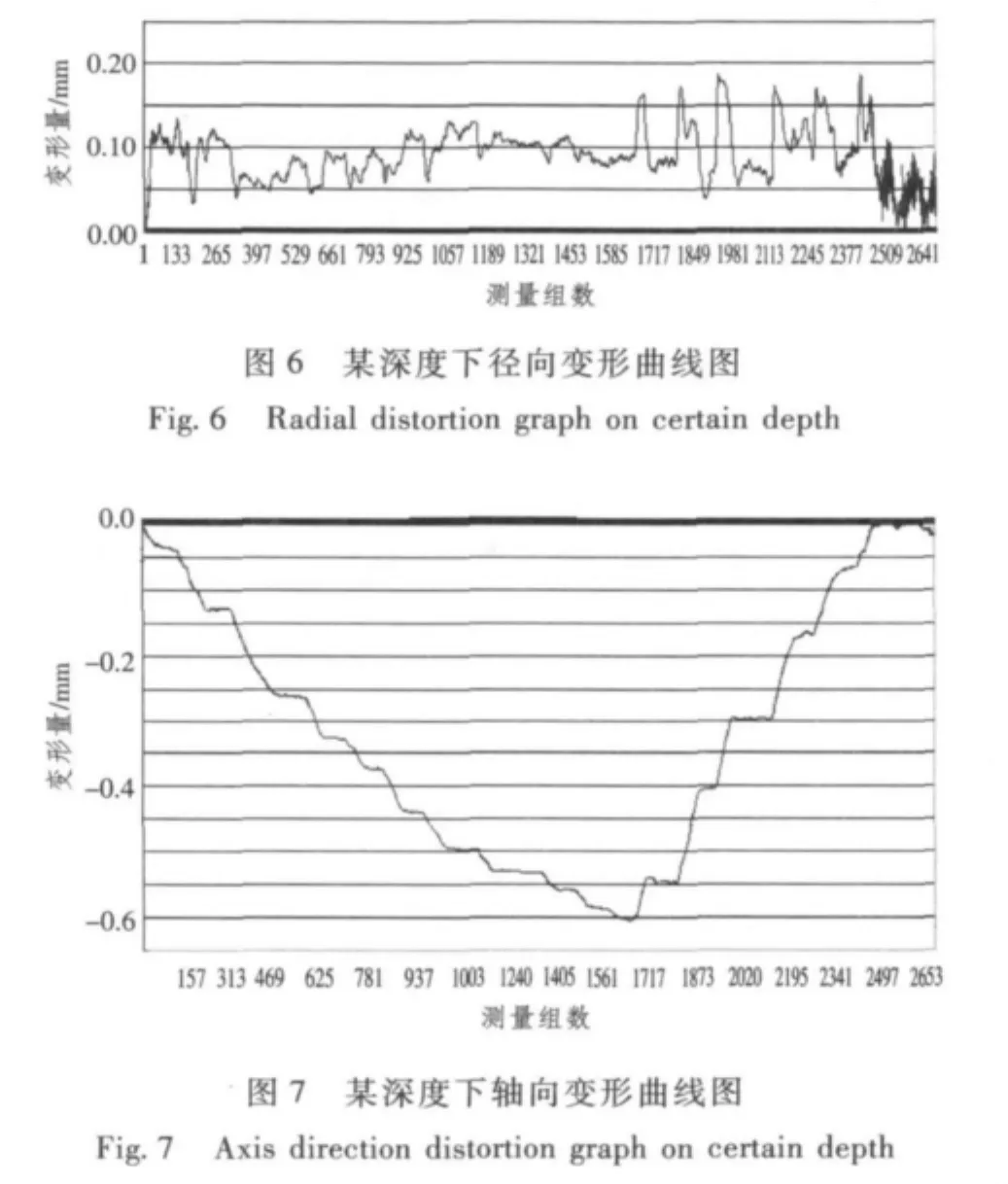
试验共采集了5 770组数据,对径向变形量处理后数据如图6所示,图中横坐标为测量组数,纵坐标为变形量。
由图6可知,径向变形量较小,而且变形规律性不明显。对轴向变形量处理后数据如图7所示,图中横坐标为测量组数,纵坐标为变形量。
由图7可知,下潜过程中轴向变形量随着下潜深度的增加而增加,变形规律性强,梯度明显。
从图6和图7综合可以看到,焊接件相对于气缸的变形主要表现在轴向变形上,径向变形微小。轴向变形且随下潜深度的变化变形量规律性很强,能体现耐压隔壁焊接垫套的变形规律,也从侧面验证了试验数据有效、可信。
[1]祁寿.标准海堤变形测量方法探讨[J].中国水运(下半月),2008,(05):161-162.
[2]薛春艳.船体变形测量系统软件研究[D].长春:长春理工大学,2007.
[3]方武生.大型桥梁变形测量方法及其在平寨特大桥施工监控中的应用研究[D].长沙:中南大学,2007.
[4]佘亚军,等.雷弹存放架变形测量研究[J].舰船科学技术,2009,31(12):90-95.
[5]周艳,等.激光跟踪仪在主轴箱体检测上的应用[A].第四届十三省区市机械工程学会科技论坛暨2008海南机械科技论坛论文集[C],2008.554-556.
