基于直线阵和已知声源的噪声源识别分析方法
2011-03-07晁大海代雪峰程广福
晁大海,代雪峰,程广福
(1.海军驻大连地区军代室,辽宁大连116021; 2.大连测控技术研究所,辽宁大连 116013)
0 引言
对舰船噪声性能评价通常是针对该目标整体而言的,而舰船通常具有大尺度、结构复杂的特点,其噪声源特征分布往往也是不均匀的。识别主要噪声源并确定其在噪声场中的贡献则是舰船声学设计中噪声指标分解的重要依据,在潜艇声学设计时,需要对设计的噪声指标进行合理分配,才能最大程度地保证潜艇的安静性,这样就必须定量地综合确定各类噪声源的贡献,根据贡献的大小,提出噪声控制的具体指标和方向。
受现有试验方法限制,噪声源的识别不可避免地存在一定误差范围,且对多源情况下的贡献分离方法比较单一。针对以上不足,本文提出了一种基于直线阵和已知声源的噪声源识别及贡献分离方法,应用该方法可以提高噪声源识别的精度,使误差范围在现有基础上进一步缩小,根据相关系数判别目标不同部位对辐射噪声贡献的大小。
1 方法原理
本方法实质是用相关或相干分析的方法来识别噪声源、分离噪声源的贡献。通过在目标上加装发射声源,声源发射单频信号频率和强度已知,利用直线阵系统测量目标辐射噪声。在航行试验中,在目标上记录自噪声及振动信号的基础上同时采集已知声源信号,测量船上同时基记录直线阵系统测量的辐射噪声。目标以匀速直线航行的机动方式通过测量区,目标上安装的自噪声水听器与声源在纵向相对位置已知,并且记录目标的航速。通过对辐射噪声信号进行分析获取目标主要频谱特征,后续对这些特征频谱进行源识别和贡献分析。在分析时首先需要确定已知单频声源信号和直线阵各阵元接收信号之间因传播距离带来的时间延迟,通过对声源信号和直线阵各阵元接收信号进行相关分析,查找与单频声源频率对应的最大相关值,确定信号时延;然后对各个自噪声测点信号与直线阵接收信号进行分析,根据已知单频声源位置和航速以及上一步确定的时延对直线阵信号进行综合时延补偿,通过计算相关或相干值初步实现识别噪声源和分离噪声源的贡献,分析的频率就是辐射噪声中的特征频率,这里把各个自噪声信号假设代表不同部位的噪声源。其中,确定时间延迟是关键。
2 时间延迟方法
时间延迟估计总体上分为2类:一类是基于相关运算的时间延迟估计,即利用当τ-D=0时,两接收信号的相关性最大,选择τ=D作为时间延迟估计;另一类是基于自适应信号处理技术的方法[1-2]。由自适应滤波器根据信号的统计特性,在某种最优准则下自动调节自身参数,只需很少或根本不需要任何先验知识就可以估计出时延信息。常用的自适应时延估计方法有LMSTDE,DLMSTDE,ETDE以及它们衍生的各类算法。
2.1 相关估计
广义相关法是时延估计最常用也是最经典的方法。相关是时间延迟最直接的方法,而对于信噪比较低的信号来说,在进行相关之前做一些降噪的处理有助于提高时延估计精度。
设两接收信号的离散时间信号模型为:


式中,k为离散时间变量;D为经过采样周期归一化后的时间延迟;s(k)为感兴趣的信号;v1(k)和v2(k)为噪声。
设s(k)为单频信号,当v1(k)和v2(k)为高斯白噪声时,采用广义相关法,在对x(k)和y(k)做相关运算前进行预滤波,效果是十分明显的。在snr=0的情况下,进行仿真运算。以时延估计值与真值相差3个采样点以内为估计正确的判断。在没有进行滤波时,10 000次仿真运算中,有1 064次估计错误。而进行滤波后再作相关运算,10 000次仿真估计全部正确。可见,广义相关法对高斯白噪声,并且对信号的频率有准确预知情况下,有很好的效果。
然而,当s(k)为宽带信号时,滤波就起不到如此明显的作用了,此时可以采取其他提高信噪比的方法,如小波降噪[3]等。
2.2 自适应估计
将时延问题转换为自适应滤波器的参数估计问题,较早应用较广泛的ETDE方法,是在迭代中将权系数设为sinc函数的样值,即滤波器系数ωn=,通过对瞬时误差的平方求梯度下降,即可得到时延估计值D^。在k时刻的输出误差为:
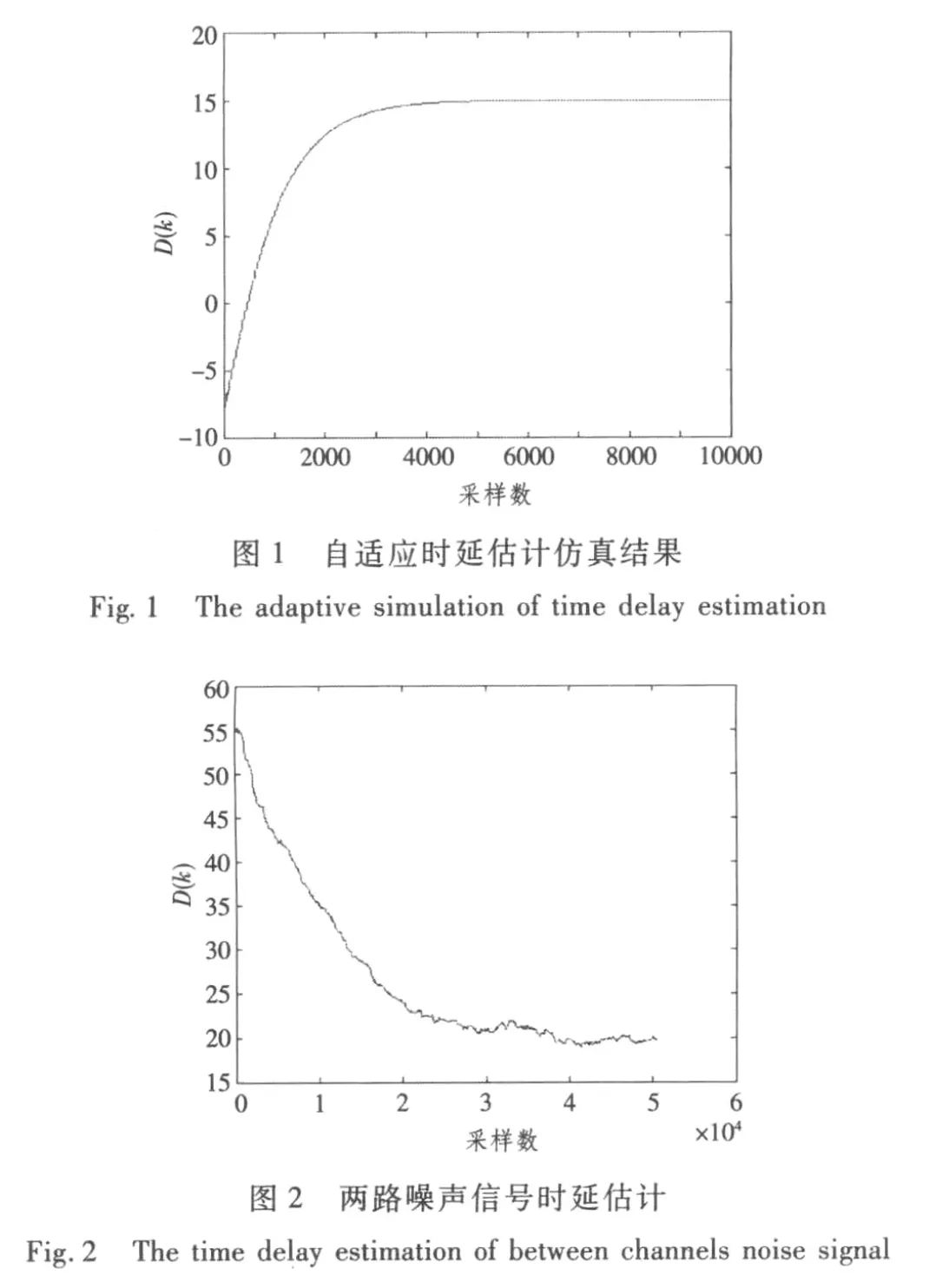
应用这一方法构造仿真信号,进行时延估计,如图1所示,其时延真值为15。从相关材料来看[4-5],信噪比对此方法无论从收敛速度还是收敛结果上的影响并不大。
应用自相关法对实测噪声进行时延估计,选取水平阵测得的两路信号进行迭代,其结果如图2所示。对相应信号应用相关方法解算出时延估计为19,与自适应方法得到时延估计结果基本一致。
自适应方法的收敛速度决定于步长因子μ,以及时延初值D^(0)的选取。式(3)和式(4)也可根据具体信号特点进行适当修改。对于冲击性比较强的α稳定分布噪声下,式(4)可以改写成

其中,1≤p<α≤2。当p=2时则与式(4)相同。
通过对比分析了基于相关和基于自适应法的2种时延估计方法,应当说2类方法各有特点。相关法计算速度快,但对于信噪比较低的情况,其精度迅速下降。对于窄带信号,滤波会有很好的效果,但对于宽带随机信号则可以采取的手段就很有限。自适应法将时延估计问题转化为参数估计问题,其结果受信噪比影响较小,但其收敛速度与步长因子有关,而步长因子又受到信号功率的限制;另一方面其收敛结果也与初值选取有关,应用自适应法时要慎重选取初值D^(0)。
由于本研究所用声源信号为单频信号,在其发射频率上相对于各种背景信噪比足够强,可以采用相关的分析方法进行时延估计。
3 仿真
由于时延估计在上述内容中已经讨论过,因此本部分内容主要对通过相关系数判断目标各辐射部位对辐射噪声贡献大小的可行性进行仿真研究。
仿真目标沿直线以速度v通过测量直线阵,直线阵阵元数为3个,目标上装有5个等间距的自噪声水听器,可以设定5个自噪声水听器为频率相同强度不同的单频相干声源。
假设海水为等声速梯度,只考虑直达波,不考虑海面和海底多次反射,在高斯背景噪声条件下,阵元接收信号为:
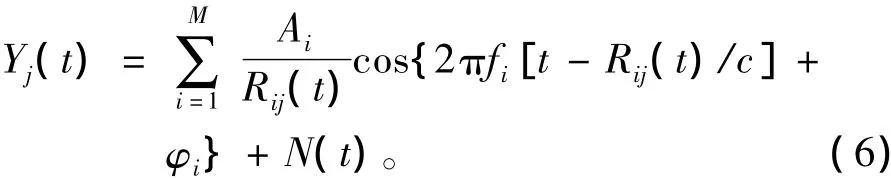
式中:M为自噪声水听器数;Yj为第j个阵元接收的信号;Ai和φi分别为第i个自噪声水听器接受信号的幅度和初相;fi为自噪声声源的频率;Rij为第i个自噪声水听器到第j个阵元的距离;c为声速;N(t)为高斯白噪声。
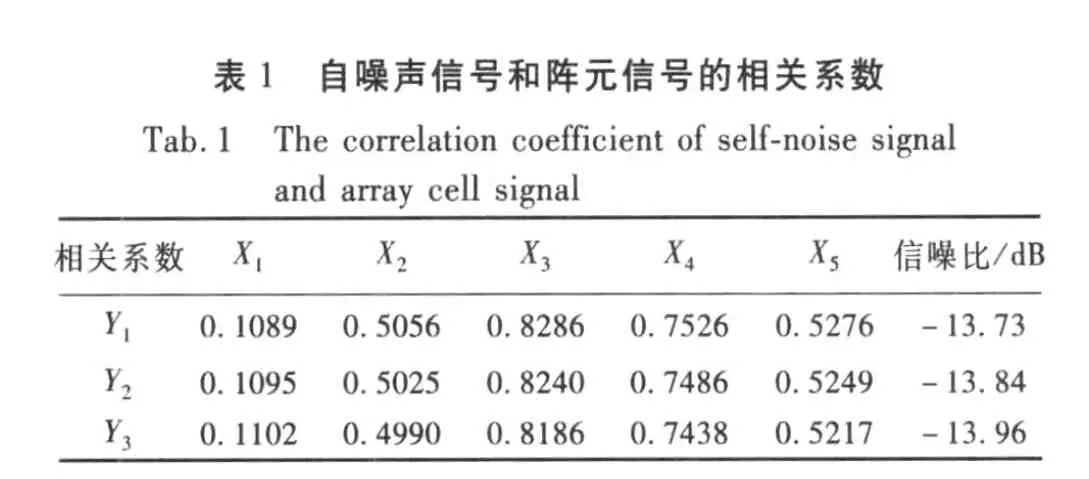
本仿真实验参数设置为M=5,直线阵为3阵元,f1=f2=f3=f4=f5=50 Hz,A1=1,A2=2,A3=5,A4=4,A5=3,目标航速为6 kn,各自噪声水听器的初相φi各不相同,Rij可结合已知参考声源跟阵元的距离R及目标的运动轨迹等参数,利用余弦定理获得。噪声信号设置为方差为1的高斯白噪声。表1给出各自噪声信号与阵元信号的相关系数,从中可以看出,各自噪声测点与直线阵上各阵元的相关系数大小关系完全符合预先对仿真信号中各自噪声测点幅度大小关系的设定。通过仿真试验证明了运用该方法实现噪声源贡献分离的可行性。
4 试验
下面运用本方法对某水下目标某试验工况数据进行分析研究,分析按方法原理介绍中的步骤进行。
4.1 分析辐射噪声频谱特征
图3为某水下目辐射噪声频谱图,图中2条曲线分别代表某试验工况及对应工况状态下进行的模拟声源工况频谱曲线。可以看到,f1和f2频率在两频谱曲线图中均较为突出,下面将对这2个频率运用本文提出的方法进行噪声源识别及贡献分离研究。
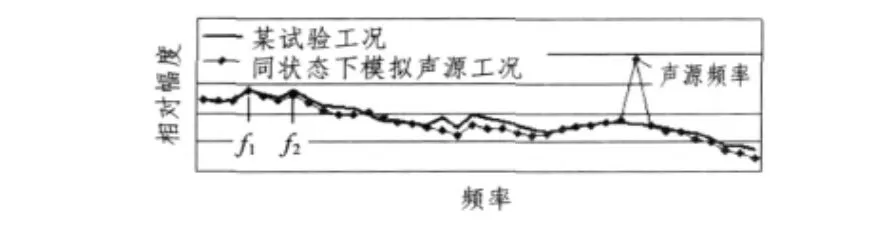
图3 某水下目标辐射噪声频谱图Fig.3The radiation noise spectrum of underwater target
4.2 确定声源正横时刻
该试验条件下声源位置正横时刻的确定有2个途径:一是利用目标上安装的测距发射换能器发射的测距信号,通过查找测距发射换能器与直线阵的距离最小值确定测距换能器正横时刻,进而通过换算确定声源位置正横时刻[6];二是利用安装的高频发射声源信号,通过查找声源频率的通过特性最大值时刻来确定声源正横时刻。
在以往针对水下目标的试验中,由于没有在目标上安装发射声源,因此目标与测量装置间的空间位置关系只能依赖测距信号。但是考虑到探测距离等因素,测距信号的发射周期不能太短,使得目标正横时刻的判断存在一定的时间误差。舰船上潜在的噪声源分布复杂,加之受信噪比不足、设备工作状态变化等因素的影响,利用通过特性法通常无法精确测定潜艇某部位与测量装置的正横时刻。但是通过潜艇加装已知声源使这一方法能得以顺利应用。发射声源信号具有参考点位置明确,信噪比突出的显著优势,得到正横时刻的结果理论上精度比利用测距信号得到的正横时刻的结果优越。图4为直线阵上某一阵元接收信号的声源频率通过特性曲线。
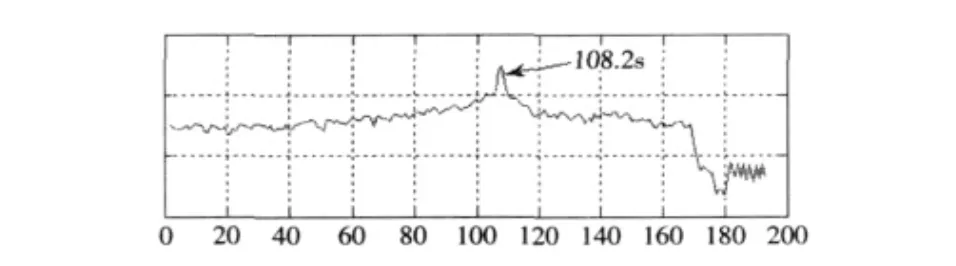
图4 利用通过特性获得声源正横时刻Fig.4The sound source characteristic acquired by passing property at time abeam
4.3 确定阵上各阵元与声源的时延
信号由发射声源至接收阵元的传播过程不可避免的产生了时间延迟,既是说阵元接收到的信号总是滞后于声源信号发射的时刻。在理想水声场中点对点的收发过程时间延迟是距离和声速的函数,而实际的水声场往往比较复杂,海底底质、声速梯度、海面反射等都会对信号的传播构成影响,再加之声源是安放在1个相对密闭的由消声敷瓦包裹的水腔内,因此,信号时延只适于用距离和声速近似求得,而无法精确确定。
在此基础上,可以选取辐射噪声正横时刻时间段对应的声源信号,另取辐射噪声数据段与之进行相关分析,通过不断微调辐射噪声数据段的起始时间,最终令二者在声源信号频率上相关系数最大,以进一步确定声源信号的时延。
以某一阵元为例,图5横轴为时间单位,纵轴为直线阵上该阵元接收信号与声源信号在声源频率上的相关系数。可见,在经过0.047 s的时延后二者在相关系数上出现了最大值,而在理想条件下二者的时延经计算应为0.045 s。
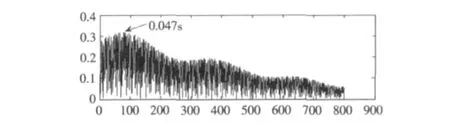
图5 利用相关分析方法获取时延Fig.5The time delay acquired by analyzing of correlation method
相关时延大于理想时延,进一步证明了前述的复杂环境对声信道产生的影响客观存在。
4.4 确定各自噪声测点正横时刻及阵上各阵元时延
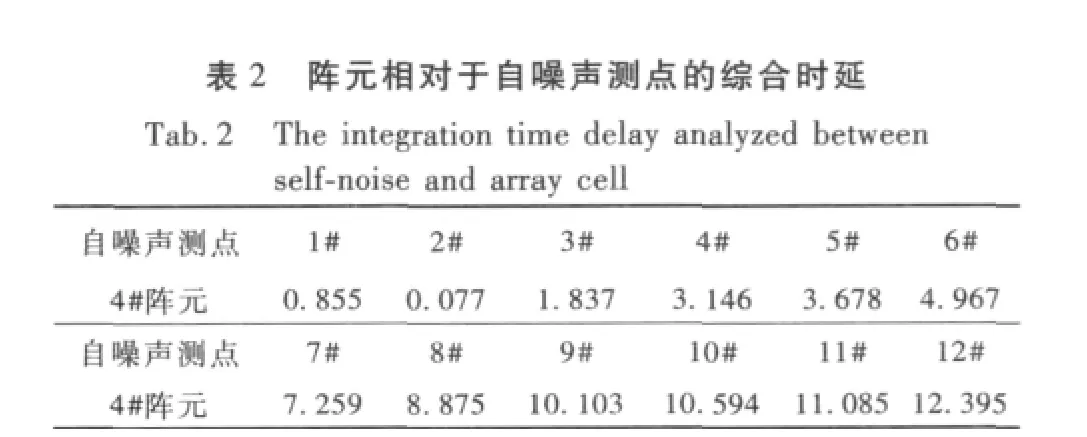
前述分析过程得到的正横时刻及传播时延均是针对目标上安装的发射声源进行的,然而要分析目标上各自噪声测点位置在通过直线阵正横时刻时的相关系数还需对声源位置正横后各自噪声测点的正横时刻进行时延补偿,再加上前述分析得到的信号传播时延即是辐射噪声应整体补偿的综合时延。
由于目标上各自噪声测点的空间相对位置已知,那么结合相应工况下的航速信息,可得到辐射噪声测量直线阵上各阵元需要补偿的综合时延,以4#阵元为例,综合时延结果如表2所示。
4.5 识别噪声源和确定特征频谱贡献
以表2为依据,在同时基数据基础上选取各自噪声部位正横时对应的辐射噪声数据,首先进行综合时延补偿,然后对关心频率做窄带滤波,最后进行相关分析,提取辐射噪声中体现出的特征频谱上的各自噪声水听器部位相关系数。
图6和图7分别为以4#阵元为例分析得到的目标上各自噪声测点的f1和f2特征频谱的相关系数图。
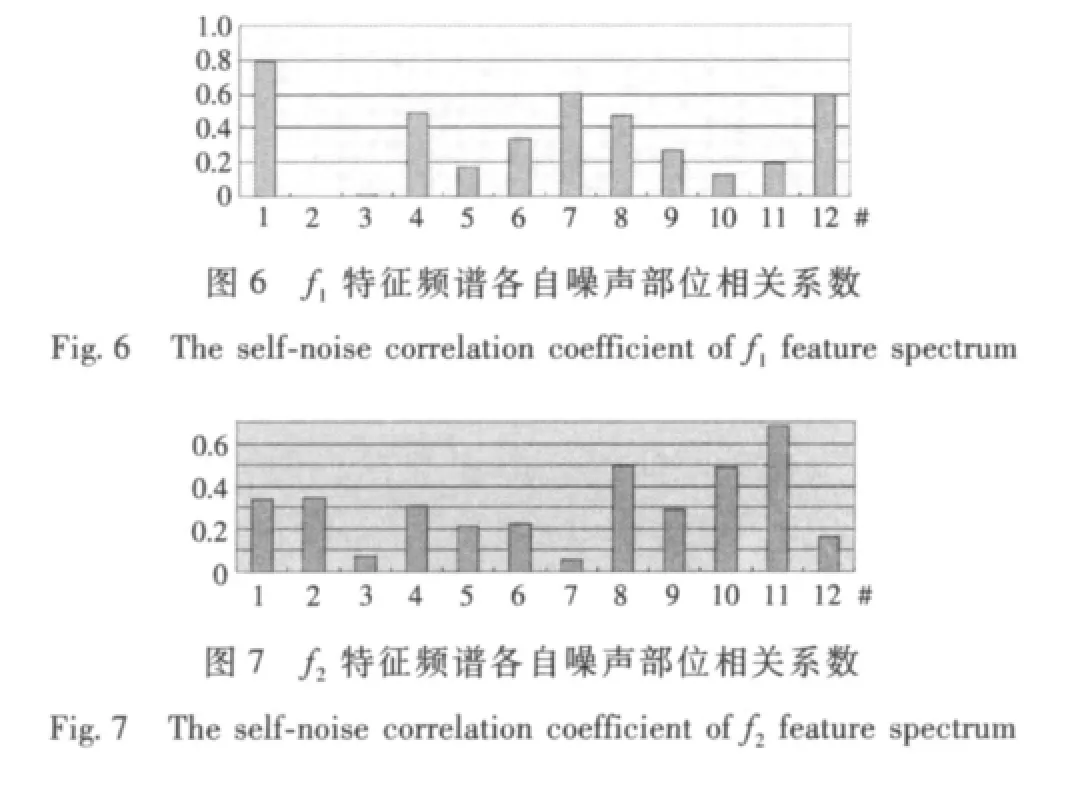
图中结果说明,辐射噪声中f1特征频谱的贡献主要来源于目标上1#自噪声测点部位,7#测点及12#测点次之;f2特征频谱的贡献主要来源于目标上11#自噪声测点部位,8#测点及10#测点次之。
5 结语
本文针对噪声源识别及贡献分离问题提出了一种新的数据分析处理方法。在仿真研究过程中取得了较好的预期效果,能达到识别噪声源并分离贡献的目的。试验数据分析取得的结果与采用传统分析方法取得的结果存在一些出入,但在对主要噪声源的识别及贡献分离方面结果是较为一致的。对水下目标的噪声源识别及贡献分离是一个复杂问题,单一分析手段很难解决所有技术难点,本文提出的分析方法作为一种新思路在必要时可以和传统分析手段互为补充,有利于噪声源分析工作的深入开展。
[1]AGEE B G.Spectrol self-coherence resforal[J].IEEE Trans.on signal processing,1998,46(1):51-58.
[2]YU X H,HE,Z Y.A modified adaptive fast transversal filter algorithm with real-time order variant characteristic[Z].Proc.ofAMSEconferenceonmodelingand simulation.West-Germary,June 1987.
[3]厥开良,等.WDA相关法时间延迟估计[J].清华大学学报(自然科学版),2005,45(5):577-580.
JUE kai-liang,et al.Time delay estimate of WDA correlation method[J].Journal of Tinghua University,2005,45(5):577-580.
[4]SO H C,et al.Two adaptive algorithms for multipath time delay estimation[J].IEEE Journal of oceanic engineering,1994,19(3):458-462.
[5]SO H C,et al.A new algorithm for explicit adaptation of time delay[J].IEEE Transcations on signal processing,1994,42(7):1816-1820.
[6]王之程,陈宗岐,于沨,刘文帅.舰船噪声测量与分析[M].北京:国防工业出版社,2004.