国外振动噪声有源控制技术发展现状
2011-03-07刘小玲王旭郭莹刘亚凤
刘小玲,王旭,郭莹,刘亚凤
(中国船舶信息中心信息资源部,北京 100192)
0 引言
有源控制技术最早起源于20世纪30年代,并在20世纪80年代中期至90年代中期达到高潮。这项技术主要擅长于控制低频振动噪声,与传统的无源噪声控制方式互补性极强,具有低频范围效果好、体积小、对被控系统物理特性影响小、安装设计方便,能适应未知扰动,以及系统和结构参数不确定性等优点,为控制低频噪声开辟了一个新的发展方向,成为振动噪声控制领域的研究热点。
目前,国外已经开展了振动噪声有源控制技术的研究与应用。美海军在《2000~2035年海军技术:成为21世纪的军队》中列出了潜艇将来需要重点关注的辐射噪声降低技术,主要有:①主动基座技术;②隔离结构技术;③先进的艇壳被覆技术(如自适应消声瓦技术);④双壳建造技术;⑤武器发射瞬间噪声降低技术等。除了②、④两项外,其余基本上都与有源控制技术有关。
1 有源控制技术的分类与发展
根据具体控制方式的不同,有源噪声控制技术可分为有源声控制和有源力控制2种。
1.1 有源声控制
在20世纪90年代以前,有源控制系统中一般采用声源(如扬声器)产生次级声场进行控制(如图1所示)。因此,这种有源控制方式被称为有源声控制,也被称为“以声消声”。有源声控制的研究在20世纪80年代中期至90年代中期达到高峰,以英国南安普顿大学的声与振动研究所(ISVR)的研究最为出色,研究成果主要应用在船舶或者飞机的舱室、汽车驾驶室以及其他一些工作空间环境中。

图1 有源声控制结构示意图Fig.1Schematic of active control of vibration and noise
1.2 有源力控制
在工程实际中,有相当一部分噪声是由于结构振动辐射引起的。对于这类噪声,人们试图用有源声控制的方法加以控制。然而理论研究结果表明,只有在极低的频率下,用少量点声源可以取得降噪效果。如果次级结构振动变得稍稍复杂一些,或激励频率稍微高一些,用点声源来控制声辐射就变得异常复杂,效果也不能令人满意,于是人们开始考虑通过一个次级力源控制结构振动进而控制结构声辐射,即有源力控制。后来,这种控制方法也被称为“以力消声”。很多国家对这种控制方法进行了重点研究。
1)美国
美国弗吉尼亚大学振动声学实验室的C.R.Fuller等人从1985年开展了用次级力源控制结构声辐射或声传输的研究,并称这种方法为结构声有源控制(Active Structural Acoustic Control,ASAC)。他们的研究从简单梁、板结构到复杂的圆柱壳,以及板壳复合结构,许多研究成果都得到了具体的应用,开创了有源噪声控制的新途径。到20世纪90年代中期以后,这个研究机构的工作逐渐深入,工作重点转向研究解决实际应用中遇到的问题。
在实际中,置于声场远场的误差传感器会妨碍工作、布置不便,同时有限点的声压并不能代表结构的声辐射功率。因此,如何在结构表面或声场近场布置误差传感器(或称为检测传感器)获得结构辐射声功率信息,成为有源力控制的一个主要问题。具体来说,误差传感器可以检测声压参量,也可以检测结构参量,如振动加速度、速度及位移、结构应力等,需要研究这些参量与辐射声功率的映射关系及转换关系。
同时,可以选用的次级力源类型有电动制动器、压电陶瓷片、压电聚偏乙烯(PVDF)薄膜等,因此,次级力源类型及个数对控制效果的影响也是一个重要的研究内容。
2)澳大利亚
关于有源力控物理机理的研究对控制器的设计优化有直接的帮助,因此,从不同角度研究有源力控制的物理机理也受到人们的关注。近年来,澳大利亚海事平台部进行了相关研究。

针对潜艇结构建立有源控制物理系统模型,在建模时考虑壳体周围的水负载,并且将模型两端分别设计为半球壳和圆锥壳(如图2所示),这样的简化比以往单一的针对圆柱壳体研究更加贴近实际情况。初级力为模拟螺旋桨推进器的轴向力,并通过绕壳体一周的T形PZT激振器来施加控制力(如图3所示)。采用了前馈主动控制策略进行控制,在这种控制策略下,刚性结构结合激振器能产生幅值足够的控制力矩来降低低频时潜艇壳体总的辐射声压。经过对仿真结果分析发现,这个控制系统可以使前三阶轴向模态的辐射声压得到有效控制,衰减幅度可达三分之二。
此外,澳大利亚海事平台部还分析了不同的控制力作用位置对控制效果的影响,通过比较分析了线形控制力矩与点状控制力矩的控制效果,发现二者的结果非常相似,表明用点力取代线性力进行控制是可行的,这一结论对于将有源控制技术应用于实际的工程中有很大的推动作用。
3)英国
英国也非常注重有源控制技术的研究。作为“机敏”级攻击型潜艇的主要设计研发单位,英国BAE系统公司在2008年1月与谢菲尔德大学正式签署为期5年的合作协议,成立了主动控制研究中心(CRAC),就提高潜艇的声隐身能力,联合开展技术研发,降低潜艇的声信号,为BAE系统公司研制潜艇提供技术保障。
目前,该研究中心的研究主要集中在以下3个方面:
①选择性阻尼
选择性阻尼属于主动阻尼技术,主要用来降低潜艇艇体的振动噪声。图4为选择性阻尼的1个实验模型,长约2 m,重50 kg,图上模型前端是一个170 N的激振器用来模拟螺旋桨的扰动输入,控制力是通过安装在另一头的1个50 N的激振器来施加。在这个模型上还安装了15个加速度传感器,用于测量振动的频率、振幅等信息,随后将振动信息输入到数字信号处理器中,信号处理器利用设定好的控制算法计算出正确的波形输给控制激振器,然后通过控制激振器消除艇体的振动。
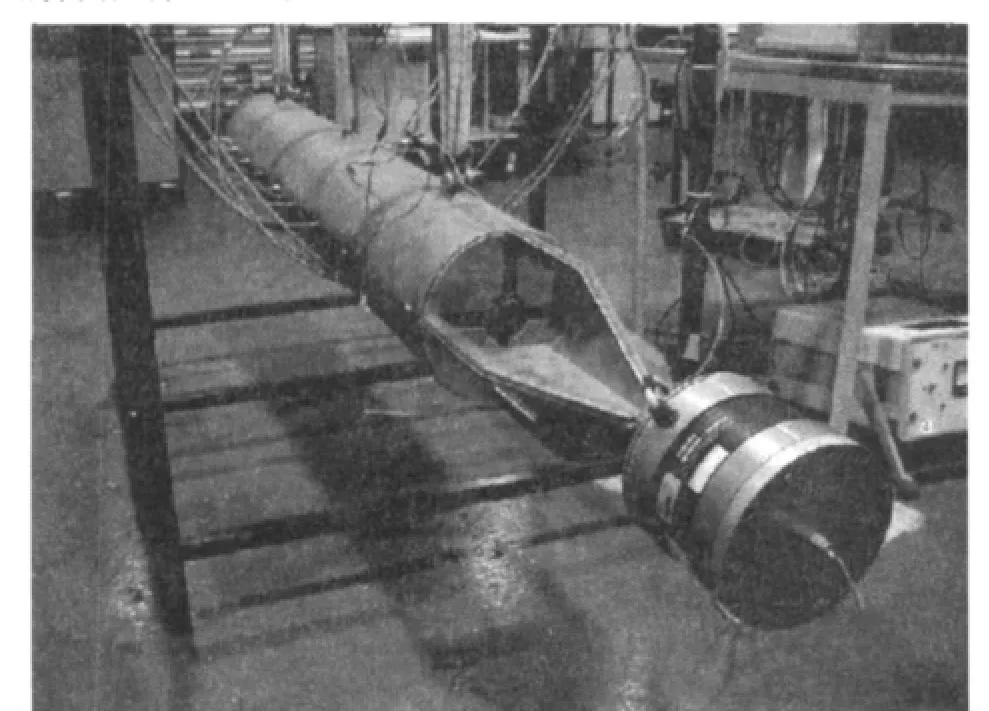
图4 选择性阻尼试验模型Fig.4Small scale model of selective damping

图5 选择性阻尼试验结果Fig.5The result of selective damping's experimentation
图5是实验结果,通过对比控制前后壳体在某一共振频率下的振动幅值分布,可以看出控制效果还是非常明显的。在这个小的试验模型上进行试验,不断对控制算法进行有效优化,并确定激振器和误差传感器的最优布放位置,是实船试验必不可少的一个准备阶段。
随后,主动控制研究中心又做了第2个试验模型。第2个模型重约5 t,没有披露具体的尺寸,但是特别指出,与第1个模型相比,为了更加贴近实船情况,其密度大了很多。第2模型实验时控制输入的是2个约50 N的激振器,试验采用了8个加速度传感器。在第2个试验模型上,发现了451 Hz与511 Hz 2个共振频率,针对这2个共振频率,他们分别进行了单、双模态控制试验。
在第2个模型之后,研究中心还成功完成另1个重35 t模型的试验。2001年,研究中心在1艘排水量为4 500 t的实艇上成功地进行了全尺寸的试验验证,试验结果如图6所示。
在全尺寸实验时采用了8个均为170 N的激振器进行控制,但是由于在试验时有2个激振器没有工作,所以试验结果没有达到预期的理想。图6中试验结果图的纵坐标为加速度级,横坐标为频率,他们认为频率尺度涉及到了商业机密,所以没有透露。通过这个全尺寸的试验,研究中心认为,选择性阻尼不但有效而且还具有一个容错性能。
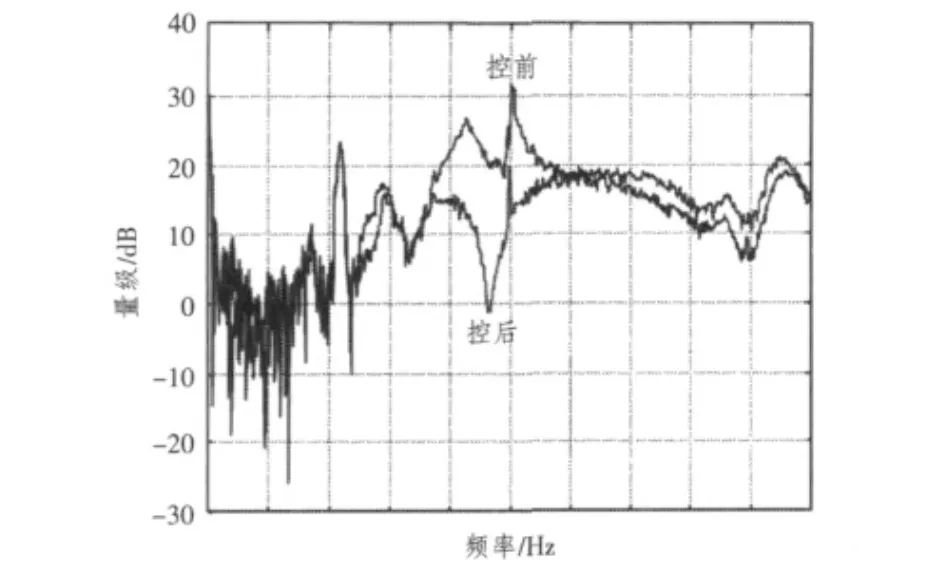
图6 选择性阻尼全尺寸试验结果Fig.6Suppression of thrust block resonance—full-scale vessel
通过一系列试验,该研究中心认为,这项技术对于大型舰船结构的振动噪声,特别是低频噪声的控制效果十分理想,并且实现了很多被动措施达不到的控制效果。主动控制研究中心正对其开展进一步的研究,对自动校准和适应控制系统进行研究,用来处理不确定的、随时间变化的振动噪声,使其能在实艇上得到应用。
②智能弹簧支座
研究中心针对抑制壳体的振动噪声辐射研究虽然取得了一些成果,但是并没有就此满足,他们还考虑追溯到振动的源头进行控制,进一步降低艇体噪声辐射。

图7 智能弹簧的隔振性能提高Fig.7Improvement due to a smart spring Mounting System
目前,大型船用机械通常安装在1个浮筏上,浮筏再由船体上的1套弹性橡胶底座与艇体连接,这些橡胶底座对于浮筏与船体间的振动传递起到一定隔离作用,但是毕竟是一种被动的隔振方式,在共振频率处的隔振效果并不理想(如图7所示)。这些共振会对船体产生很大的作用力,并产生一些特征信号。从这个频幅图上可以看出,特别在低频时,被动隔振效果非常不好,会产生很大的共振峰。针对这一情况,研究中心提出了智能弹簧支座系统,如图8所示。
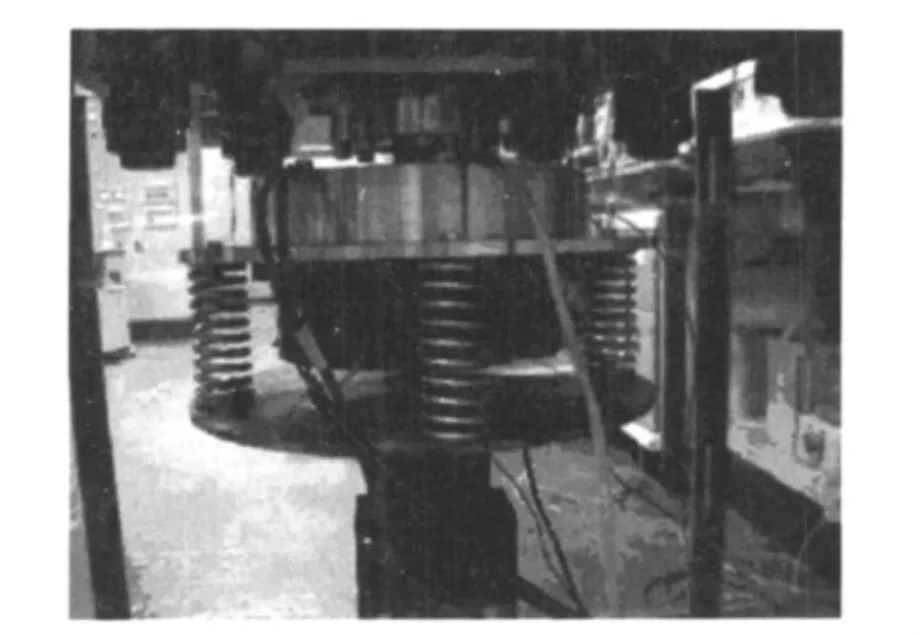
图8 智能弹簧支座结构示意图Fig.8Prototype actuator for a smart spring mounting system
智能弹簧支座属于单自由度隔振装置,是一种典型的主被动联合控制方式,与之前的主动隔振装置最大的不同之处是:不但可以实现局部控制,还可以完成全局控制。从图9中智能弹簧支座的试验结果可以看出,与单纯的被动控制相比,这个控制系统可以实现大约30 dB的衰减,基本可以实现对支座的零刚度要求。
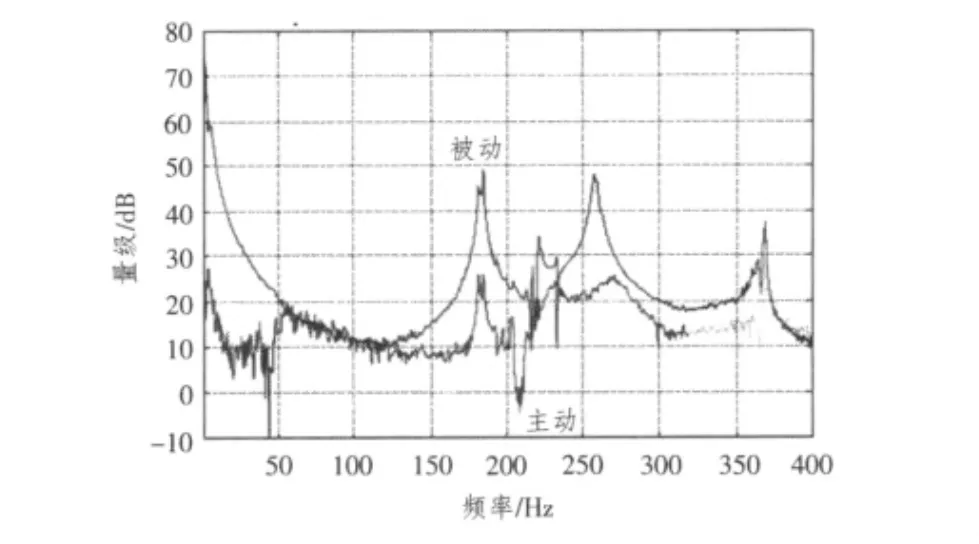
图9 主动与被动响应结果Fig.9Active and passive mount response
③六自由度主动支座
关于单自由度的主动隔振研究技术已经很成熟,但是离实际应用还是有一定距离,所以又开始了一个新的研究——六自由度主动支座系统。
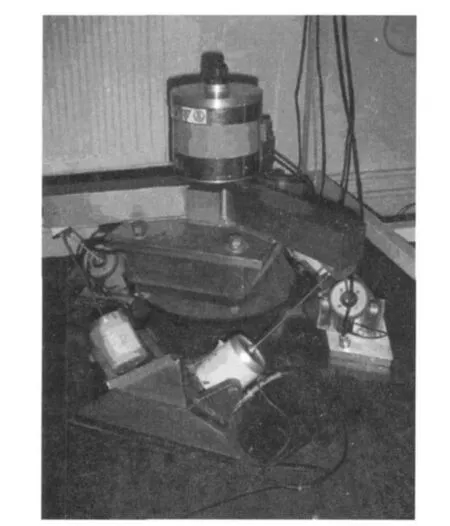
图10 六自由度支座结构示意图Fig.106 degrees smart spring mounting system
开展这项实验研究的主要目的就是为了进一步改进主动隔振技术方案,以便将来在实船上得到应用。该试验模型结构如图10所示。从图中可见,模型顶端用1个170 N的激振器模拟船用机械振动,中间是1个标准的舰用隔振橡胶,周围是6个30 N的电动力式激振器,通过这6个像脚一样伸出来的电动力式激振器来实现六自由度的控制。与前面的单一自由度的情况相比,这个模型的控制系统要复杂的多,至少需要6个加速度传感器来监测振动传递,因此就有6个输出信号、6个输入信号。针对这一情况,在控制算法上选用了重复控制算法。这种算法的优点在于,在反馈系统中,对于周期性外激励信号的跟踪或者抑制具有很高的控制性能。通过试验证明,在这种控制算法下,加速度的最大衰减量可以达到50 dB。这个结论证明了重复控制算法具有很大的潜在开发价值,为以后的实船试验积累了很多宝贵的经验。
2 结语
1)有源控制系统物理机理的研究对控制器的设计优化有直接帮助。而且通过跟踪分析具有代表性研究学者的研究历程发现,关于有源控制系统物理机理的研究通常是从简单结构开始,逐渐发展到复杂结构。
2)主/被动联合控制技术将成为未来的主要发展方向,这样不仅可以最大限度地降低潜艇的噪声,也可以在主动控制系统失效的情况下,潜艇仍然可以利用被动控制技术保持较低的噪声水平。
3)英国BAE系统公司与谢菲尔德大学采取合作的方式,开展主动控制技术研究,这样既可以利用企业丰富资金优势,又可以利用大学科研机构所具有的人力资源和创新精神,使两者能很好的结合起来,更好地促进新型减振降噪技术的研究,这种合作方法值得借鉴。
4)主动控制技术成为当前研究隐身技术发展的一个重要方向,但是国内是在20世纪80年代才开始引入这项技术,由于基础薄弱,发展缓慢。从BAE系统公司的经验来看,由总体研究单位组织开展这类的研究无论是对于技术研发还是应用推广都具有很大优势。
[1]汉森C H,斯奈德S D.噪声和振动的主动控制[M].北京:科学出版社,2002.4-8.
[2]PAN X,HANSENCH.Activecontrolofvibration transmission in a cylindrical Shell[J].Journal of Sound and Vibration,1997,203:409-433.
[3]XIA Pan,YAN Tso,JUNIPER R.Active control of radiated pressure of a submarine hull[J].Journal of Sound and Vibration,2008,311:224-242.
[4]XIA Pan,YAN Tso,JUNIPER R.Active control of lowfrequency hull-radiated noise[J].Journal of Sound and Vibration,2008,313:29-45.
[5]JOHNSON A,DALEY S.A“SMART SPRING”mounting system:A new approach for isolating vibration of marine machinery[Z].Warship 2002 Naval submarines 7 London,UK,31-41.