并联式混合动力汽车遗传模糊控制策略的研究*
2011-02-27杨世春朱传高
杨世春,朱传高,高 莹,李 君
(吉林大学,汽车动态模拟国家重点实验室,长春 130022)
前言
混合动力汽车控制策略主要解决的问题是发动机和电机的转矩分配以及对电池SOC的控制,以实现发动机和电机的有效工作,在保证车辆动力性的前提下,达到节能、环保的目的。近年来,模糊控制在混合动力汽车控制策略中得到广泛应用[1-3],利用模糊控制器实现混合动力汽车的转矩分配,取得良好的控制效果。但是由于缺乏知识采集的手段,没有规范及合理的建立方式,模糊控制器的隶属度函数和模糊控制规则的选取和优化通常尚须依赖于操作者或专家的经验。
本文中设计了某混合动力汽车的模糊逻辑转矩控制器,利用遗传算法对该控制器进行优化,最后通过仿真验证了优化结果的有效性。
1 模糊逻辑转矩控制器设计
图1为所研究的双离合器单轴转矩耦合并联式混合动力总成结构图,它包括:发动机、两个离合器、电动机/发电机、自动变速器和动力电池组。其主要部件及参数如表 1所示。
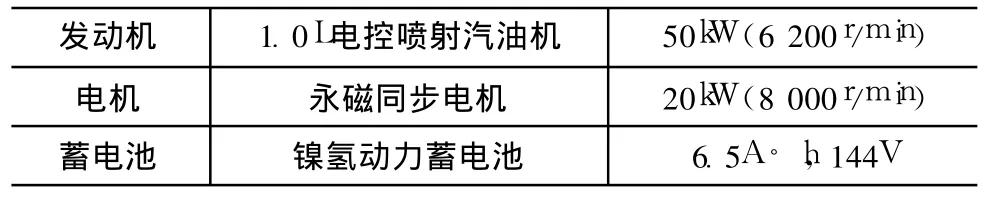
表1 系统主要部件及参数
1.1 模糊逻辑转矩控制器设计
本文中研究的并联混合动力总成主要动力来自发动机,电机为辅助动力。在设计控制策略时要尽可能使发动机在最优曲线上运行,只有当电机输出转矩及电池SOC不足或过高而不能满足整车需求转矩时,发动机才偏离最优曲线运行,同时尽可能使电机高效工作,电池SOC在合理区间内变化。
根据上述设计目标和发动机效率的高低,确定模糊转矩控制器的输入变量为:整车需求转矩 Tr与当前车速下发动机最佳效率转矩Te_opt的比值p和动力电池的SOC,而模糊转矩控制器的输出变量为发动机的转矩系数r。发动机的转矩输出按下式确定: Te=r×Te_opt。然后对由模糊控制器得到的发动机输出转矩进行调整,Te<Te_min时,Te=0,Tm=Tr; Te>Te_max时,Te=Te_max,Te+Tm=Tr,其中Te_opt、Te_max和 Te_min分别为发动机最佳效率转矩、最大转矩和关闭转矩。
模糊转矩控制器框图如图 2所示,通过转矩识别确定驾驶员的需求转矩,与SOC同为输入,经模糊控制器后,再由转矩调整分别得到发动机转矩和电机转矩。
1.2 模糊规则的选取
为使模糊逻辑转矩控制器能覆盖所有的工况,混合动力汽车需要有多种运行模式,因而将整车需求转矩 Tr与当前车速下发动机的最优曲线转矩Te_opt的比值p,分成5个模糊子集:NB、NS、OK、PS、PB,其论域确定为[-1.5,1.6]。根据SOC的范围把它也分成5个模糊子集:z1、z2、z3、z4、z5,其论域为[0,1]。发动机的转矩系数 r也分为 5个模糊子集:A1、A2、A3、A4、A5,共论域为[0,1.6]。p、SOC和r值各个隶属度函数[3-4]如图 3所示,输入语言变量和输出语言变量采用梯形和三角形的隶属度函数。
在模糊推理中,与(AND)运算采用取小,蕴涵运算采用Mamdani方法,结论合成采用累加法,非模糊化则采用面积重心法,建立相应的隶属函数和模糊规则。
2 遗传算法优化模糊控制器
由于模糊控制器本身的特点,基于专家经验建立的模糊控制隶属函数不能实现其最优的控制,因此利用遗传算法,对前面设计的混合动力汽车模糊控制器的隶属函数进行优化[5]。
并联式混合动力参数优化是一个典型的非线性约束优化问题,可表述为
其中优化目标函数f(x)为混合动力系统的油耗和排放,约束条件gi(x)为一组非线性不等式,表示车辆的动力性能指标。优化设计变量为混合动力转矩分配控制器的控制参数,其上下限为]。
2.1 初始种群生成
图 4为模糊变量的模糊划分和各模糊子集的隶属度函数[6],用 x1、x2、x3、x4、x5、x6、x7表示隶属函数各个划分点。因为输入输出量的模糊隶属函数都要进行编码,所以由此生成一个长度为 21的一维十进制矩阵x1~x7,x8~x14,x15~x21,依次表示对p、SOC和r的隶属函数划分点。
初始种群由n个染色体组成,每个染色体的各位数字都是 0或 1的二进制数,在对模糊函数定义时,每一个划分点为十进制数,考虑编码精度,使每一个变量的编码精度不大于 0.1,定义每个十进制数用 5位二进制数来表示。这样每个染色体的长度就是21×5=105。
在运算过程中,须将生成初始群体转换为模糊控制器可识别的数据,即将二进制数转换为十进制数。由于每位的二进制数随机生成,在转换成为十进数 x1~x7,x8~x14,x15~x21时,不能保证 x1到 x7是增序排列。所以在完成十进制转换后,应对生成的数字串进行再排序。x1~x7、x8~x14、x15~x21分别表示不同输入、输出变量隶属函数的划分点,由于各变量论域不同,所以在进行十进制转换时对不同变量分别进行转换。
2.2 适应度函数
选取控制系统的目标函数作为原始适应度函数,而选取混合动力汽车整个循环的油耗和排放为目标函数值[7-8],分别以不同的权重来表示优化目标,建立目标函数为
式中:x为每一个染色体所对应的序号;FC、HC、NOx、CO分别为发动机油耗和排放值;w1、w2、w3、w4分别为FC、HC、NOx、CO的权重值分别为各个参数所要优化的目标值;TDC为整个驾驶循环时间。用积分计算整个驾驶循环下的各目标值。
为使遗传算法能够用来优化模糊控制隶属函数,须确定遗传操作中的适应度函数。由式(2)可以看出,目标函数值越小,表明结果越接近最优。但在遗传算法选择操作中,适应度值越大的个体越有机会遗传到下一代。在此,对目标函数值进行排序,通过遗传工具箱ranking函数将每个目标函数值分配到适应度函数,以使最小的目标函数值对应到最大的适应度函数值。
2.3 运行参数设定
遗传算法中需要选择的运行参数主要有个体编码串长度l、群体大小M、交叉概率 Pc、变异概率Pm和终止代数n等,如表2所示。

表2 运行参数
2.4 约束条件
(1)SOC值的约束
在进行适应度值计算时,如果以混合动力系统的经济性作为优化目标,适应度函数中只包含油耗参数一项。油耗在动力系统整个循环完成后计算。如果不对电池的SOC值进行约束,优化结果很容易出现SOC值在循环结束后为0的情况。
在此,对SOC在循环开始和结束的差值ΔSOC进行限制,使ΔSOC≤0.03。
(2)模糊控制器约束
在完成十进制转换后,x1~x7、x8~x14和 x15~x21中的最大值不得大于所对应变量论域的最大值,其最小值不得小于所对应变量论域的最小值。
(3)动力性约束
表3为动力性约束条件,其中Δtrace为仿真过程中,实际车速与测试循环要求车速的差值。

表3 动力性能约束条件
3 仿真结果分析
3.1 NEDC循环下以经济性为目标的优化
仅以经济性能为优化目标时,将式(2)中的权重值 w1定义为 1,其余都取 0。确定遗传算法运行参数后,在Matlab/Simulink环境下进行仿真计算。
图5为遗传算法优化过程目标函数值的收敛曲线,由此确定了在第 80代中最优结果,并确定了优化后的模糊隶属函数,如图 6所示。
将优化后的结果重新在ADVISOR中进行仿真计算,得出并联式混合动力系统各工作参数的图表,并与优化前的情况进行比较,如图 7~图 10所示。由图7(a)和图7(b)中可以看出,优化前后SOC值在整个循环过程中变动不超过±0.005,满足对SOC控制的要求。由图8(a)、图8(b)和图9(a)、图9 (b)中可以看出,电动机的工作效率有提高,发动机工作点明显向所设定的发动机工作最优化曲线(图10)靠近。表 4为模糊控制策略与遗传算法优化仿真结果。由表 4可知,在利用遗传算法经济性优化后,并联式混合动力系统的油耗可降低 4.57%,动力性基本没有变化,但CO和NOx的排放都有提高。

表4 仿真结果对比
3.2 多目标优化结果分析
根据式(2),兼顾经济性和排放性,设定权重为w1=w2=w3=w4=0.25,在NEDC循环下,利用遗传算法进行优化。
确定适应度函数后,根据上述确定遗传算法运行参数,在Matlab/Simulink环境下进行仿真计算。
图11为遗传算法优化过程目标函数值的收敛曲线,优化后的模糊隶属函数如图 12所示。
将优化后的结果重新在ADVISOR中进行仿真计算,得出并联式混合动力系统各工作参数的图表,并与优化前的情况进行比较,如图7~图9所示。由图7(a)和图7(c)中可以看出,优化前后SOC初值和终值变动不大,满足控制要求。由图 8(a)、图8(c)和图9(a)、图9(c)可见,发动机工作点在低转速下明显下移,移向燃油效率较高的区域。同时,对照NEDC测试循环和SOC曲线,在低速时,发动机关闭,完全由电机来驱动车辆,在中低速时,发动机驱动车辆,工作点趋近于最佳转矩曲线,并且多余转矩向电池充电。在加速和高速工况时,发动机和电机同时驱动车辆。
由表 4可知,在利用遗传算法多目标优化后,并联式混合动力系统的动力性略有降低,油耗降低3.65%,排放参数中HC、CO和NOx都有明显降低。
4 结论
(1)设计了双离合器单轴转矩耦合并联混合动力汽车转矩分配模糊控制策略,针对建立在专家经验基础上的模糊控制不能实现最优控制的问题,采用遗传算法实现转矩分配模糊控制器的优化。
(2)在NEDC循环下,应用遗传算法,在只考虑经济性条件下对模糊控制策略进行优化,油耗可以降低4.57%,但CO和NOx的排放都有提高。
(3)在NEDC循环下,应用遗传算法,综合考虑经济性和排放性能的多目标控制策略优化,油耗可以降低3.65%,同时可以实现排放的降低。
[1] Lin Chan-Chiao,Peng Huei,Grizzle JW.Power Management Strategy for a Parallel Hybrid Electric Truck[C].Proceedings of the 2002 Mediterranean Control Conference,Lisbon,Portugal, July,2002.
[2] 彭栋,殷承良,张建武.基于模糊控制的并联式混合动力汽车制动控制系统[J].吉林大学学报(工学版),2007(4):756-761.
[3] Schouten Niels J,Salman Mutasim A,Kheir Naim A.Energy Management Strategies for Parallel Hybrid Vehicles Using Fuzzy Logic[J].Control Engineering Practice,2003(11):171-177.
[4] 童毅,张俊智,欧阳明高.混合动力汽车扭矩管理策略[J].清华大学学报(自然科学版),2003(8):33-36.
[5] Jin Yaochu,et al.Neural Network Based Fuzzy Identification and Its Application to Modeling and Control of Complex Systems[J]. IEEE Trnas.On Systmes,Man,and Cybernetics,1995,26(6): 990-997.
[6] Goldberg D E.Genetic Algorithms in Search Optimization&Machine Learning.Reading[M].MA.Addison Wesley Publishing, 1989.
[7] Amir Poursamad,Morteza Montazeri.Deisgn of Genetic-fuzzy Control Strategy for Parallel Hybrid Electric Vehicles[J].ControlEngineering Practice,2008,16:861-873.
[8] Antonio Picclo,Lucio Ippolito,Vincen zo Galdi,etal.Optim ization of Energy Flow Management in Hybrid Electric Vehicles via Genetic Algorithms[C].2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics Proceedings 8-12, July 2001,Como,Italy.
