基于卡尔曼滤波的交互式多模型GPS 定位方法研究
2011-02-22陆建山王昌明宋高顺张爱军
陆建山,王昌明,宋高顺,张爱军
(南京理工大学 机械工程学院精仪系,江苏 南京210094)
0 引言
全球定位系统(Global Position System,GPS)是一个具有代表性的无线电卫星导航定位系统,其在测绘、通信、交通、军事等各领域均得到了成功的应用。只要持有一种能够接收、跟踪、变换和测量的GPS 信号接收机,就可以全天候和全球性地测量运动载体的七维状态参数和三维姿态参数[1],但其在工作过程中却极易受到工作环境、信号传播过程、星历变化等多种因素的影响。因此,如何进一步提高GPS 单点定位精度,成了GPS 技术的一个热点问题。文献[2-3]分别采用Kalman 滤波算法对静态、动态GPS 定位信号进行了误差处理分析;文献[4]建立了适合GPS 误差一阶差分序列的AR 模型,并有效实现了误差序列的一步预测。这些方法均能得到较高的定位精度,但几乎都不能很好地跟随定位过程中状态的变化,如噪声的突变或载体运动的机动性。
交互式多模型(Interacting Multiple Models,IMM)是一种软切换算法[5],最初由H.A.PBlom 在1984年提出,目前在机动目标跟踪领域得到了广泛的应用。以往的状态估计器设计一般是基于一个参数固定的系统模型[6],如若工作状态变化,往往会引起模型的不匹配而引入较大误差。而IMM 算法使用2 个或更多的模型来描述工作过程中可能的状态,最后通过有效的加权融合进行系统状态估计,这就很好地克服了单模型不准确的问题。基于上述优点,近期,IMM 算法在组合导航领域也得到了很好的应用[7-9]。本文拟将IMM 算法应用于GPS 静态、动态定位,分别通过实测数据和仿真实验进行误差分析。
1 基于Kalman 的交互式多模型算法
IMM 算法是一个循环递推的过程,在每个循环中,基于各个模型的滤波器并行工作,模型之间的转换通过Markov 链进行,通过加权融合各滤波器的输出得到最终的组合状态估计。本文滤波算法(IMMKF)融合交互式多模型和Kalman 滤波算法,其一个循环主要有以下四步:输入交互、Kalman 滤波计算、模型概率更新计算、状态与协方差的融合估计,现给出IMMKF 算法从k-1 到k 时刻递推过程。
1)输入交互
在无约束条件下,模型之间的转换按照一阶Markov 链进行[10]。交互计算后,滤波器i 在k 时刻的输入状态和误差协方差初值分别为0i(k-1)、P0i(k-1):
其中,πji为Markov 转移概率,
2)Kalman 滤波计算

其中,Φi为模型i 的状态转移阵;Γi为噪声驱动阵;Qi为系统噪声协方差,Hi为量测阵;Ri为观测噪声协方差。
3)模型概率更新计算
若模型i 在k 时刻的滤波残差为零均值的高斯白噪声,则其似然函数Λi(k)为
其中,εi为模型i 的滤波残差,Si为残差的协方差阵。
因此,模型的概率更新为
4)状态与协方差的融合估计
最后通过对各模型滤波器的输出进行加权融合,得到IMMKF 最终的状态估计(k)与协方差P(k).
2 试验与分析
2.1 GPS 静态单点定位
为验证算法在GPS 单点定位应用中的可行性,首先在实验室环境下,进行了GPS 静态单点定位的试验。试验中,采用JAVAD 公司的JGG100 型GPS OEM 板采样4 516 s 的静态数据,该OEM 板单点定位精度为:<5 m.采样过程中,GPS 天线置于室外某一待测点保持不变。由于天线所在位置的真实坐标未知,在算法处理中采用坐标均值作为真实值进行运算。
对于GPS 静态单点定位,采用匀速运动(CV)模型进行分析。选取待测点的位置和速度信息作为状态变量位置信息作为观测量Zi=[x,y,z]T,其离散化的运动学模型为
其中:Wi(k-1)为模型i 的系统噪声;Vi(k)为观测噪声;Hi=[I303×3]3×6;T 为采样周期。
针对静态单点定位的特殊性,在进行多模型建立时,主要考虑待测点环境噪声变化的多样性。考虑两种情况,两模型均采用CV 模型,其中模型1 为噪声较大情况,模型2 为噪声较小情况,Q1=100Q2,R1=100R2.对采样数据进行误差处理,结果如图1所示。
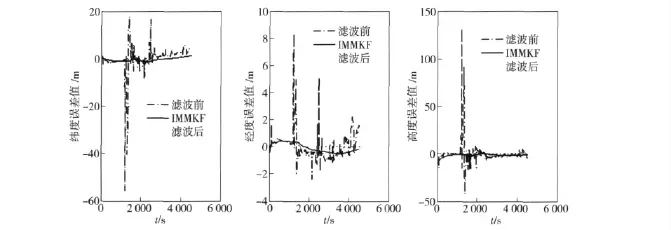
图1 GPS 静态单点定位坐标误差曲线Fig.1 Coordinate errors of GPS static point positioning
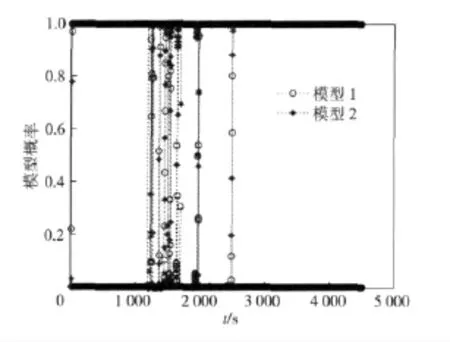
图2 GPS 静态单点定位模型概率图Fig.2 Model probabilities of GPS static point positioning
从误差曲线图中,首先可以看出,原始数据的误差较大,且在采样过程中,误差情况出现了较大的改变。分析其原因,其误差主要源于GPS 接收机、卫星的高动态运动特性、信号的传播过程及其多路径效应等;而误差的波动则主要是受到了周围环境及可视定位卫星间的切换等因素影响。经IMMKF 滤波后,除初始阶段外,原始较大的误差基本被控制在了1.5 m 之内,且未再出现原始误差中抖动的情况。从模型概率变化图中,可以看出在整个采样过程中,大部分的时间均是模型2(噪声较小情况)占优,但在0~15 s、1 193~1 548 s 之间以及1 966 s、2 490 s左右模型概率出现较大改变,这些变化对照误差曲线图也可很清晰地看出,这段时间内误差较大,故此时模型1(噪声较大情况)的概率增大,模型1 成为适配模型。因此,结合两图可以很清楚地看到变噪声模型的IMMKF 算法能够很好地跟随环境噪声的变化。
2.2 GPS 动态定位
不同于静态定位,GPS 动态定位的运动过程较为复杂,其涉及到载体的机动过程,但载体的运动主要有以下几种情况:匀速、加速以及转弯,且一般以匀速居多。本文中,在二维平面内,不失一般性地假设了载体的一组运动过程:0~100 s 载体从静止开始做匀加速运动,100~300 s 为匀速运动过程,紧接着100 s 进行转弯,最后又匀速运动了200 s,其理论运动轨迹如图3所示。仿真中,纬度方向精度取为8 m,经度方向经度取为10 m,且假设两方向的量测不相关。
对于GPS 动态定位,同样可以采用CV 模型进行分析,但CV 模型不能匹配整个运动过程中的状态,故此时另选匀加速(CA)模型为模型2.此处的运动为二维平面运动,其状态量、观测量分别为Xi=运动模型方程同GPS静态单点定位所述,但Φ1=02×2]2×6.进行仿真分析时,分别采用单模型(CV模型)Kalman 滤波、IMMKF 滤波,并将滤波结果与原始误差进行对比分析,误差曲线如图4所示。
从误差曲线中可以看出,单模型滤波、IMMKF滤波均取得了一定的效果。细观单模型误差曲线图,其滤波曲线较平滑,抖动小,但在经、纬度方向均存在两个明显的误差较大处,对照轨迹图可看出,这两处分别是载体初始加速阶段和转弯处,而在其余的两匀速运动阶段误差均很小,说明CV 模型能够很好地切合匀速运动,但对非匀速阶段其效果不太理想,因为CV 模型是一种匀速运动模型,而机动转弯其实也是一种加速运动,因此对于初始加速阶段及转弯处,CV 模型不再适合。再对比交互式多模型误差曲线图,可看出IMMKF 将CV、CA 两模型进行了有效的融合,其误差较初始误差有了很大的改善,且消除了误差在不同运动状态时出现的波动问题。对于加速及机动转弯过程中,单模型滤波不能匹配的情况,IMMKF 充分发挥了多模型的优势,此时将CA 模型取为适配模型,结合图4可看出,经过IMMKF 滤波,这两个过程并没有出现单模型滤波中较大误差的情况。因此,整个过程中IMMKF 均能取得较好的滤波效果,有效地控制误差的大幅波动。
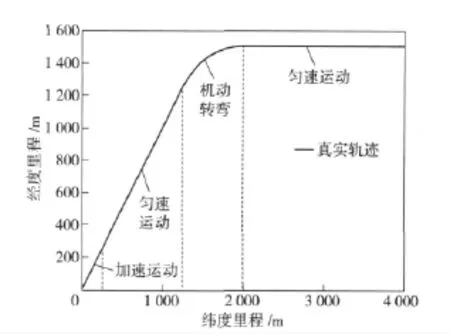
图3 载体运动轨迹图Fig.3 Curve of vehicle trajectory
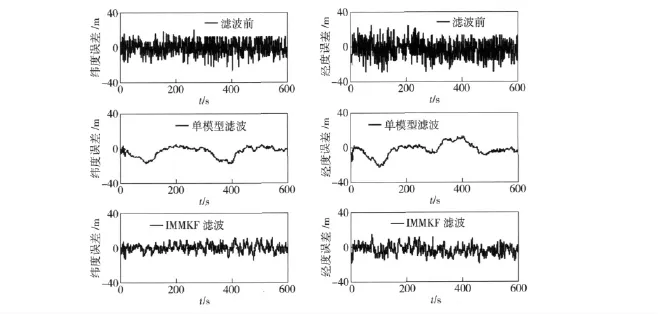
图4 动态定位误差曲线图Fig.4 Errors of dynamic point positioning
3 结论
本文将机动目标跟踪领域应用广泛的交互式多模型算法引入到GPS 定位中,并结合Kalman 滤波算法详细阐述了IMMKF 算法的计算流程。文中对静态定位、动态定位两种情况从不同角度分析了IMMKF 的可行性。
1)静态情形,以误差曲线结合模型概率图,清晰地展示出了误差变化及模型匹配的过程,并说明了变噪声的多模型算法能够很好地适应周围环境噪声的变化;
2)动态情形,通过IMMKF 与单模型滤波后误差的对比,体现了IMMKF 的优越性,并证明了通过将不同模型间有效的融合,IMMKF 能克服单模型在状态过程中由于模型单一而带来的模型不匹配的局限性。
References)
[1] 刘基余.GPS 卫星导航定位原理与方法[M].北京:科学出版社,2007.LIU Ji-yu.GPS satellite navigation principles and methods[M].Beijing:Science Press,2007.(in Chinese)
[2] 杜晓辉,任章.基于卡尔曼滤波的GPS 静态定位精度分析[J].全球定位系统,2008:47-51.DU Xiao-hui,REN Zhang.Precision analyze based Kalman filter for GPS static point positioning[J].GNSS World of China,2008:47-51.(in Chinese)
[3] 刘婵媛,陈国光.基于GPS 的卡尔曼滤波技术研究[J].弾箭与制导学报,2006,26(4):110-112.LIU Chan-yuan,CHEN Guo-guang.The researching of Kalman filtering based on GPS[J].Journal of Projectiles,Rockets,Missiles and Guidance,2006,26(4):110-112.(in Chinese)
[4] 刘娣,薄煜明,邹卫军.基于时间序列的GPS 误差建模及单点定位精度研究[J].兵工学报,2009,30(6):825-828.LIU Di,BO Yu-ming,ZOU Wei-jun.GPS error modeling based on time series and research on the accuracy of point positioning[J].Acta Armamentarii,2009,30(6):825-828.(in Chinese)
[5] 杨飞,巴宏欣,奚和平,等.一种机动目标跟踪的IMM 模型优化设计方法[J].解放军理工大学学报:自然科学版,2005,6(5):428-431.YANG Fei,BA Hong-xin,XI He-ping,et al.IMM optimized model design method for maneuvering target tracking[J].Journal of PLA University of Science and Technology,2005,6(5):428-431.(in Chinese)
[6] 陆可,肖建.IMM 算法实现非线性状态估计的研究与仿真[J].计算机仿真,2008,25(5):77-80.LU Ke,XIAO Jian.Research and simulation of IMM algorithm in nonlinear state estimation[J].Computer Simulation,2008,25(5):77-80.(in Chinese)
[7] Huang Dongliang,Henry Leung.EM-IMM based land-vehicle navigation with GPS/INS[C]∥2004 IEEE Intelligent Transportation Systems Conference,Washington DC:IEEE,2004:624-629.
[8] 臧荣春,崔平远,崔祜涛,等.基于IMM-UKF 的组合导航算法[J].控制理论与应用,2007,24(4):634-638.ZANG Rong-chun,CUI Ping-yuan,CUI Hu-tao,et al.Integrated navigation algorithm based on IMM-UKF[J].Control Theory &Applications,2007,24(4):634-638.(in Chinese)
[9] Dah-jing,Chien-hao Tseng.Fuzzy adaptive interacting multiple model unscented Kalman filter for integrated navigation[C]∥18th IEEE International Conference on Control Applications Part of 2009 IEEE Multi-conference on Systems and Control,Saint Petersburg:IEEE,2009:1684-1689.
[10] 赵琳,王小旭,丁继成,等.组合导航系统非线性滤波算法综述[J].中国惯性技术学报,2009,17(1):46-58.ZHAO Lin,WANG Xiao-xu,DING Ji-cheng,et al.Overview of nonlinear filter methods applied in integrated navigation system[J].Journal of Chinese Inertial Technology,2009,17(1):46-58.(in Chinese)
