基于SVPWM的异步电动机矢量控制系统仿真
2011-02-20段峻
段 峻
(陕西工业职业技术学院电气工程学院, 陕西 咸阳 712000)
0 引 言
交流传动技术从理论上解决了交流调速系统在静动态性能上与直流传动相媲美的问题.矢量控制技术模仿直流电动机的控制, 以转子磁场定向, 用矢量变换的方法实现了对交流电动机转速和磁链控制的完全解耦,目前交流调速系统的应用越来越广泛[1].交流电机有比较确定的数学模型,因其结构简单、可靠性高、性能优良、输出转矩大等特点,交流异步电机应用广泛,且随着交流异步电机应用领域的不断拓宽,对电机控制系统的设计要求也越来越高,既要考虑成本低廉、控制算法合理,又需兼顾控制性能好、开发周期短等要求,为此建立有效的交流异步电机控制系统的仿真模型已成为电机控制算法设计人员迫切需要解决的关键问题.目前,SPWM和电流滞环调制器已被广泛应用于矢量控制系统中,但利用率低、脉动大等问题一直没有得到很好的解决.
本文在分析交流异步电机数学模型的基础上,借助于Matlab 强大的仿真建模能力,利用Simulink中内含的功能元件,提出了一种基于SVPWM的建立异步电机矢量控制系统仿真模型的新方法[2],该方法简捷、效果理想.仿真结果证明了这种新型建模方法的快速性和有效性.
1 交流异步电动机模型
三相交流异步电机是一个高阶、非线性、强耦合的多变量系统.为了便于分析,假定:(1)三相绕组对称,忽略空间谐波,磁势沿气隙圆周按正弦分布;(2)忽略磁饱和,各绕组的自感和互感都是线性的;(3)忽略铁损,不计涡流和磁滞损耗;(4)不考虑频率和温度变化对绕组的影响.则三相定子的电压方程可表示为:
(1)
式中:UA、UB、UC为定子三相电压;iA、iB、iC为定子三相电流;ψA、ψB、ψC为定子三相绕组磁链;ri为定子各相绕组电阻;P为微分算子,P=d/dt.
三相转子的电压方程为:
(2)
式中:Ua、Ub、Uc为转子三相电压;ia、ib、ic为转子三相电流;ψa、ψb、ψc为转子三相绕组磁链;r2为转子各相绕组电阻.
磁链方程为:
(3)
其中Lij为绕组间互感(i,j=A,B,C,a,b,c).
电磁转矩方程为:
(4)
式中:np为电机极对数;θ为角位移.
运动方程为:
(5)
式中:Te为电磁转矩;Ti为负载转矩;ω为电机机械角速度;J为转动惯量.
2 基于SVPWM的异步电动机矢量控制系统
矢量控制的思想是将电机三相定子电流解耦成空间相位相差90°的转矩电流和励磁电流并分别进行控制.在转子磁场定向下,异步电动机矢量控制系统可以被分解为转速和磁场两个独立的子系统.
根据异步电动机矢量控制系统原理,控制系统一般采用双闭环控制方案,即转速环、电流环.这里,电流环和转速环采用PI控制.外环的PI参数很重要,主要是由于外环决定系统性能,噪声等因素给内环带来的扰动也可由外环加以抑制或弥补.为提高系统的转矩性能,系统利用电压空间矢量确定逆变器的开关状态.异步电机的转矩电流isq、励磁电流isd两个电流与给定电流比较后,经过PI控制器调节和2/3变换生成三相电压,即为矢量运算器的输入量.矢量运算后生成控制逆变器开关状态的触发脉冲.根据模块化建模的思想,将控制系统分割为各个功能独立的子模块,其中主要包括交流异步电机本体模块、矢量控制模块、帕克变换模块、坐标变换模块、电流滞环控制模块、速度控制模块、转矩计算模块和电压逆变模块.通过这些功能模块的有机整合,就可在Matlab/Simulink 中搭建出交流异步电机控制系统的仿真模型,并实现双闭环的控制算法.
2.1 坐标变换模块
从三相静止/二相静止(C3S/2S) 变换的数学模型如下:
其仿真结构如图1所示.
而从二相静止/MT 坐标系(C2S/2r) 变换的数学模型如下:
其仿真结构如图2所示.

图1 abc/dq模块结构框图 图2 dq/ab模块结构框图
2.2 SVPWM模块
常规的SPWM不能充分利用馈电给逆变器的直流电压,调节过程中依然会有某些高次谐波分量,从而引起电机发热、转矩脉动和系统振荡等.目前电压矢量脉宽调制技术(SVPWM)以其物理概念清晰、算法简单、易于实现的特点,在中小功率调速系统中得到了广泛的应用[3],其仿真结构图如图3所示.
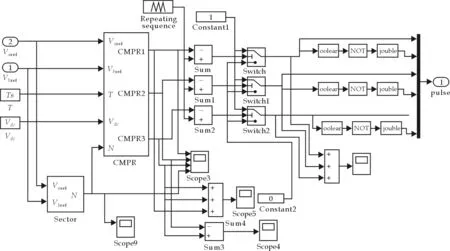
图3 SVPWM模块结构框图

图4 速度模块结构框图
2.3 速度控制模块
速度控制模块的结构较为简单,如图4所示,单输入:参考转速和实际转速的差值,单输出:参考电磁转矩Te.其中,Kp为PI 控制器中P(比例)的参数,Ki为PI 控制器中I(积分)的参数,Saturation 饱和限幅模块可将输出的参考电磁转矩的幅值限定在要求范围内.
2.4 转子磁链观测模块

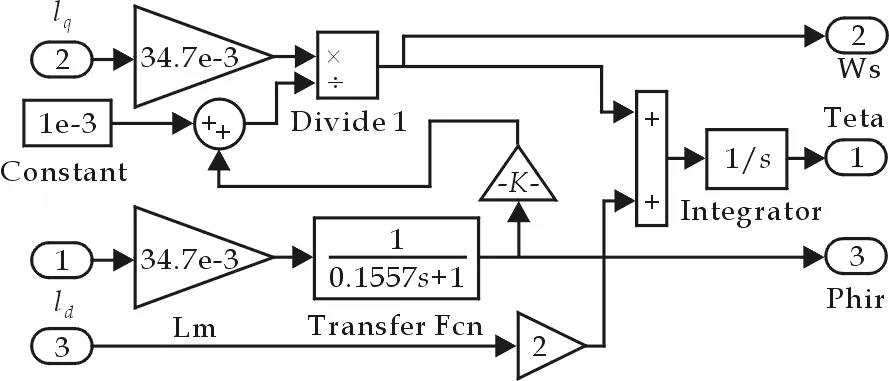
图5 转子磁链观测模块结构框图
3 仿真结果
本文在Matlab/Simulink中进行仿真,控制系统仿真模型如图6所示,主要包括电动机模块、坐标变换模块(2/3,3/2变换等)、控制器模块(速度控制器和电流控制器)以及一些输入模块、SVPWM、计算模块、示波器模块和限幅模块等.异步电动机仿真模型的输入为限幅模块输出的三相交流电压,其输出为电动机的转子角速度、三相电流、电磁转矩等[4,5].
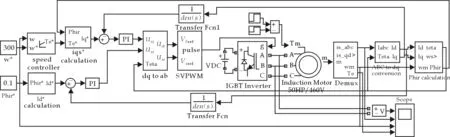
图6 异步电动机矢量控制系统的仿真平台

图7 加减负载下的速度响应曲线
电机参数如下:额定功率50 HP,额定电压3 800 V,额定频率50 Hz,定子电阻Rs=0.087 Ω,转子电阻Rr=0.228 Ω,定子自感Ls=33.9e-3 H,转子自感Lr=33.9e-3 H,定转子互感Lm=34.7e-3 H,转动惯量J=0.20 kg·m2,给定速度ω=300 rad/s,初始磁链为ψ=0.1,并在t=0.2 s时加负载转矩,负载转矩为TL=100 N·m,t=0.3 s时取消负载.在此条件下,仿真了系统的动、静态性能,系统速度上升到稳定状态只需0.18 s.系统空载启动,待进入稳定状态后,在0.2 s突加负载,在0.3 s取消负载,如图7所示,可见系统响应速度快,速度波动小,稳态精度高,几乎没有超调,转矩变化和电流响应曲线分别如图8、9所示.

图8 加减负载下的电磁转矩响应曲线 图9 加减负载下的电流响应曲线
可以看出,基于SVPWM的异步电动机矢量控制系统的转矩脉动降低,电流畸变减小,体现了SVPWM的优势,证明了本文所提出的交流异步电机仿真建模方法的合理性和有效性.
4 结束语
本文采用SVPWM取代常规的SPWM和电流滞环,并在Matlab/Simulink中对基于SVPWM的异步电动机矢量控制系统进行了仿真.仿真结果表明,系统动态性能更好,响应时间更快,转矩的脉动降低,电流的畸变减小,证明了将SVPWM运用到矢量控制系统中的可行性和有效性.采用该交流异步电机仿真模型,可以十分便捷地实现和验证控制算法,且只需对部分功能模块进行替换或修改就可实现控制策略的改换或改进,不仅可以节省控制方案的设计周期,快速验证所设计的控制算法,而且可以充分利用计算机仿真的优越性,通过修改系统参变量或人为加入不同扰动因素来考察不同实验条件下电机系统的动、静态性能,或者模拟相同的实验条件,比较不同控制策略的优劣,为分析和设计交流异步电机控制系统提供了有效的手段和工具,也为实际电机控制系统的设计和调试提供了新的思路.
参考文献
[1] 陈伯时.电力拖动自动控制系统-运动控制(第3 版)[M].北京: 机械工业出版社,2003.
[2] 华风雷. 基于Mat lab/S im ulink语言的交流调速系统仿真[J].包头钢铁学院学报,1998, (1): 88-92.
[3] 张纯江,漆汉宏.空间矢量PWM与正弦PWM的比较研究[J].信息技术, 2000,(5):64-67.
[4] 杨 勇,张建峡,许德志.基于MATLAB/ SIMULINK交流调速系统的仿真研究[J].贵州工业大学学报,2005,(4):37-41.
[5] 毛晓英, 罗文广.基于MATLAB/ SIMULINK的异步电动机矢量控制调速系统仿真[J].东北电力技术,2004,(1):14-16.
