DTC异步电机驱动系统中逆变器故障工况研究
2011-02-10张兰红陆广平陈冲
张兰红, 陆广平, 陈冲
(盐城工学院电气工程学院,江苏盐城 224051)
DTC异步电机驱动系统中逆变器故障工况研究
张兰红, 陆广平, 陈冲
(盐城工学院电气工程学院,江苏盐城 224051)
为了寻求进行系统可靠性设计的依据,对直接转矩控制异步电机驱动系统中逆变器故障工况进行研究。通过对直接转矩控制原理的分析,指出系统运行工况的影响因素;对逆变器最常见的功率开关短路与开路故障工况进行仿真研究,其中功率开关短路故障工况指系统采取截止故障开关互补开关或截止所有开关两种保护方案之后的工况。仿真结果表明,短路故障后尽管采取了保护方案,系统仍会出现大的机械和电流冲击,其中截止所有开关的保护方案相对较优,但此方案下电流和转矩的最大值仍超过正常运行时额定值的10倍以上;在发生功率开关开路故障时,故障相电流只有半个周期,转矩有低频脉动,但系统仍可继续短时运行。
直接转矩控制;异步电机;驱动;逆变器;故障
0 引言
逆变器控制的三相异步电机驱动系统因主电路结构简单、控制灵活、性能优良,在国民经济的许多领域中广泛应用,但由于电力电子器件的脆弱性及其控制的复杂性,其中的逆变器部分是较易发生故障的薄弱环节[1-3],阻碍了这类系统在可靠性要求较高的场合中的推广应用。
逆变器发生故障时,系统处于非正常运行方式,逆变器、电机均可能承受数倍于正常工况下的电压应力和电流应力,电机还会承受较大的机械冲击力,从系统可靠设计的角度出发为使元器件在故障发生后不损坏或损坏数减到最小,必须研究故障工况。在一些重要场合,如航空、军事中,即使发生故障,系统也不能停机,必须采用故障容错技术[4-7],容错技术的核心问题为故障检测与诊断,要进行故障检测与诊断,就必须对逆变器的故障工况进行研究,从中获取分析故障类型的有用信息,确定进一步要采取的保护措施或容错控制方案。
对逆变器可靠性问题的研究,国外始于上世纪90年代初期[2],国内起步较晚,近几年才开始进行各种电机控制系统中逆变器可靠性问题的研究[7-13]。高性能的电机控制系统离不开先进的控制策略,采用不同控制策略的系统中的逆变器发生故障后的工作情况差别很大。直接转矩控制(direct torque control,DTC)技术作为异步电机最为先进的控制技术之一,在高性能电机驱动场合中的应用越来越广泛,但无论是国内还是国外,关于DTC异步电机驱动系统的可靠性研究还很少,仅有的几篇文献[6-7,11,14]多是针对容错后控制策略或性能进行研究的。本文对DTC异步电机驱动系统中逆变器最常见的功率开关短路和开路故障工况进行研究,采用计算机仿真手段分析故障发生后系统最关键的核心部件,即电机承受的电流及机械应力,寻找故障特征量,为系统设计、故障诊断与系统容错提供依据。
1 DTC系统运行工况影响因素分析
异步电机数学模型在α-β坐标系中为

式中:us为定子电压矢量;is、ir分别为定、转子电流矢量;Rs、Rr分别为定、转子电阻;Ls、Lr、Lm分别为定、转子自感与互感;ωr为转子电角速度;p为电机极对数;Lσ=(LsLr-L2m)/Lr;γ0为 α -β平面呈右手关系的轴向单位矢量;设定、转子磁链分别为ψs=|ψs|ejθs(t)、ψr=|ψr|ejθr(t),θs、θr为磁链矢量角;θ为定子磁链矢量ψs和转子磁链矢量ψr之间的夹角。
忽略定子电阻影响,根据式(1),有

电机的磁链方程为


式中,τr=Lr/Rr,为电机转子时间常数。由式(3)得
根据式(2)和式(5)可得
式(4)表明定子电压矢量能迅速改变定子磁链ψs,式(6)表明转子磁链ψr的变化是由ψs变化引起的,同时他还与电机转速有关,因此ψr与ψs相比变化相对缓慢,式(7)表明若ψs幅值不变,转矩变化率正比于ψs与ψr的转速差。直接转矩控制技术就是利用不同电压矢量对定子磁链的调节作用,使转矩得到迅速有效的控制,其控制结构如图1所示。

图1 直接转矩控制系统的结构Fig.1 The configuration of DTC system
电压矢量与逆变器拓扑有关。以Sa、Sb、Sc表示三相开关状态,上管导通时值为1,下管导通时值为0。正常工况下,电机的电压矢量为

此时电压矢量共有8种,如图2中V0~V7所示(下标 0~7为 Sa、Sb、Sc的组合状态,即从 000~111)。非零电压矢量V1~V6的幅值均为2Udc/3,空间互差60°,零电压矢量V0与V7的幅值为零。以非零电压矢量为界,将空间分为6个扇区,即θ1~θ6。

图2 电压矢量及其对定子磁链的影响Fig.2 Voltage vectors and their effect to stator flux

表1 直接转矩控制系统中电压矢量选择表Table 1 Voltage vector select table for DTC system
根据式(4),在t0~t时刻定子磁链ψs为

式中,k=0,1,…,7。
式(9)表示ψs直接受所选电压矢量的影响,如图2所示。选择非零电压矢量可使ψs最快以2Udc/3的角速度运动,电磁转矩Te幅值迅速增大;选择零电压矢量时ψs静止不动,Te幅值减小。
电机最关键的物理量是电磁转矩,转矩的影响因素即为系统运行工况的影响因素。在DTC系统中,转矩受电压矢量的影响,具体为:1)逆变器拓扑,该因素决定了电机将受控于什么样的电压矢量;2)逆变器的直流母线电压Udc,该因素决定了电压矢量的幅值大小;3)工作点,即定子磁链ψs所在位置,由图2可见,ψs在不同位置,同一电压矢量对其影响不一样,转矩变化也不一样。
根据磁链方程式(5),得定子电流矢量为

式(10)表明定子电流矢量也直接受电压矢量的影响。
2 逆变器常见故障模式
逆变器控制的电机驱动系统中常见故障共有11类[8],其中逆变器部分最常见的故障有2种:1)功率开关短路故障,如图3(a)所示。该故障是由于开关元件反向击穿,或桥臂的绝缘破坏,或并接在元件两端的由电阻和电容组成的吸收回路短路,使功率开关短路。这是一种很严重的故障,故障发生时为防止其他元件损坏而导致系统瘫痪,通常系统立即采用预先设置好的保护方案,常用的保护方案为:①将与故障开关同桥臂的互补开关的驱动截止,以防止相短路;② 对逆变器所有的开关均发截止信号,停止整个逆变器的操作。2)功率开关开路故障,如图3(b)所示。功率开关通常由独立的驱动电源驱动,驱动电路元器件老化及电磁兼容性(electro magnetic compatibility,EMC)性能变差会导致驱动电源故障,使开关元件无驱动信号,造成功率开关开路。

图3 逆变器常见故障模式Fig.3 Usual fault modes of inverter
由于多个故障同时发生的可能性很小,电路均有保护措施,由一个元件发生故障(一次故障)引起多个元件继发性故障(二次故障)的可能性也极小[2],故本文重点研究功率开关短路与开路故障。
逆变器发生故障后,电路拓扑发生了变化,电压矢量随之变化,系统的工况相比于正常工况有很大的不同。由于直接转矩控制是一种非线性的砰-砰控制,对故障工况的分析需采用计算机仿真的方法。
3 逆变器故障工况的仿真分析
为便于分析,假设:1)忽略电机的铁耗与机械损耗;2)忽略空间谐波的效应;3)不考虑饱和与其他的非线性工况,如温度变化等。
利用Matlab软件构建采用直接转矩控制的异步电机驱动系统的仿真模型,通过将某一开关两侧短路来模拟开关短路故障,不驱动某一开关来模拟开关开路故障。仿真所用电机为Y100L-4 2.2 kW异步电机,其参数为:额定功率为2.2 kW;额定电压为380 V/Y;额定电流为5 A;额定频率为50 Hz;额定转速为1 450 r/min;电机极对数 p=2。带半载1kW,运行在额定转速1 450 r/min。
3.1 逆变器开关短路故障工况
3.1.1 采用截止故障开关互补开关的保护方案
设逆变器中开关T1发生短路故障,保护电路截止T4,此时电路拓扑如图4所示。此时正常应发矢量与实际得到的矢量的对应关系如表2所示。
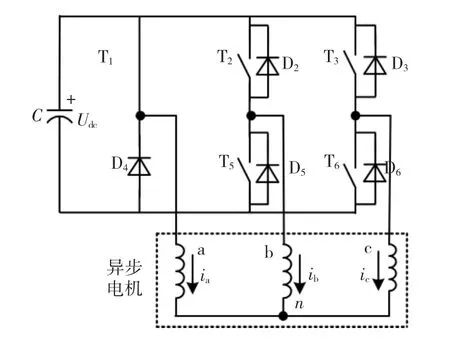
图4 T1开关短路(保护电路截止T4)时电路拓扑Fig.4 Circuit topology for T1short circuit while T4is turned off
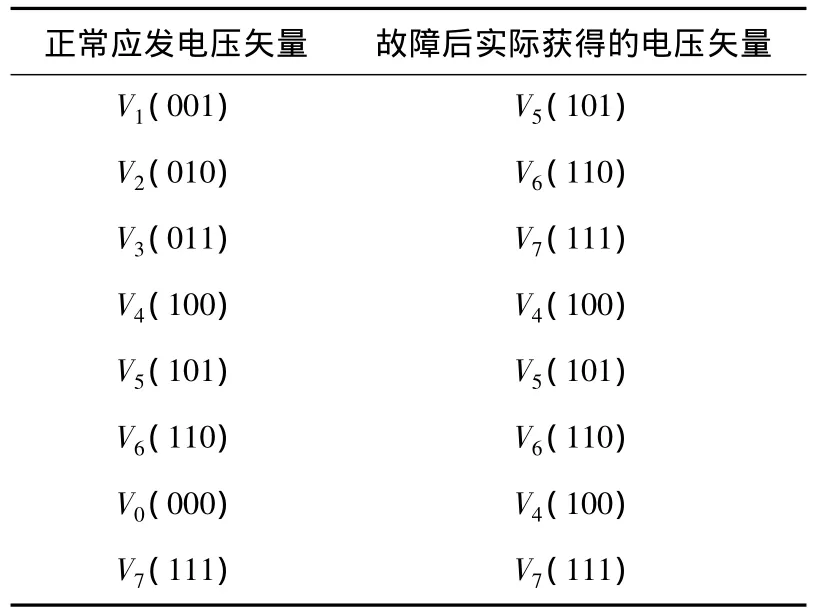
表2 正常运行与T1短路(保护电路截止T4)时的电压矢量Table 2 Voltage vectors at normal mode and T1 short-circuit while T4is turned off
故障发生时ψs所在位置也影响故障工况,故选用ψs在扇区θ1和θ2两个不同位置来进行分析。
若ψs在扇区θ1中时T1短路,T4被保护电路截止,控制器仍按表1发矢量,此时的仿真波形如图5所示。图中 Te、i、n分别为转矩、电流、转速,k为扇区θk和电压矢量Vk的下标,θk下标为整数1~6,Vk下标为整数0~7。
在θ1中按表1发V2矢量时,实际发的是V6矢量,本应控制ψs减小,实际上却使ψs增大,ψs一直沿V6方向变化,导致ψr的位置大大超前于ψs,Te变为幅值很大的制动转矩,电流矢量迅速增大,转速迅速下降。当ψs转到扇区θ2中时,应发V3矢量以减小ψs,但实际发的是V7矢量,电机三相绕组处于短路状态,根据式(1)与式(10),ψs的变化规律为

到扇区θ3时,发V3矢量时实际发的依然是V7矢量,ψs继续按式(11)衰减,可见 ψs在扇区 θ1中发生T1短路故障(T4被截止)时,转矩与电流均有很大的振荡冲击。
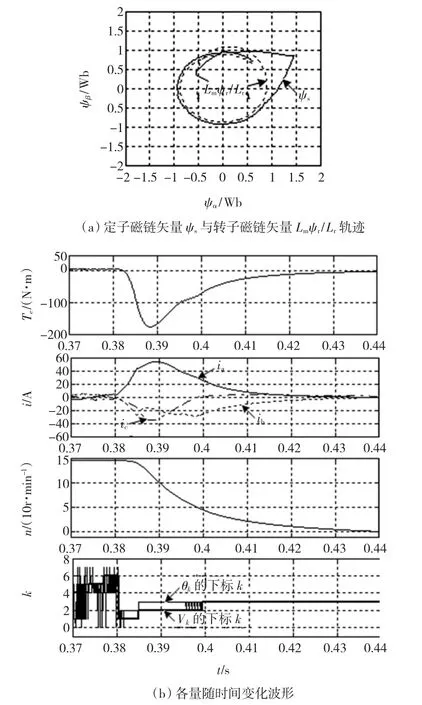
图5 T1短路(T4被截止)时故障仿真波形(定子磁链ψs在扇区θ1中时发生短路,短路时刻t=0.38 s)Fig.5 Fault simulation waves of T1short circuit while T4is turned off(When the fault happens,position of stator flux ψsis in θ1,t=0.38 s)
ψs在θ2中发生T1短路(T4被截止)的仿真波形如图6所示。在扇区θ2与θ3时,要发V3矢量,实际发的是V7矢量,ψs按式(11)衰减,ψr超前于ψs,转矩变为制动性质的,转矩与电流出现第一次大幅振荡。当ψs转到扇区θ4时,要发V1矢量,但实际发的是 V5矢量,到了 θ1扇区时,要发 V2矢量,实际发的是V6矢量,转矩与电流出现第二次大幅振荡。
由此可见,不论ψs在什么位置发生T1短路(T4被截止),由于实际获得的电压矢量不一定是所需电压矢量,两者对磁链的调节作用不同,使得ψs大大偏离所要控制的轨迹,引起转矩和电流的大幅振荡,电机转速迅速下降。

图6 T1短路(T4被截止)故障仿真波形(定子磁链在扇区θ2中时发生短路,短路时刻t=0.385 s)Fig.6 Fault simulation waves of T1short circuit while T4is turned off(When the fault happens,position of stator flux ψsis in θ2,t=0.385 s)
3.1.2 截止所有开关的保护方案
如果T1短路,保护电路截止所有的开关,仅故障开关与旁路二极管形成电流通路,此时的电路拓扑如图7所示。电机a相一直与正的直流母线相连,电机终端可能出现的电压矢量如表3所示。但由于b、c两相的电流极性组合不一定按照表3中的情况全部出现,所以实际电压矢量并没有4个。
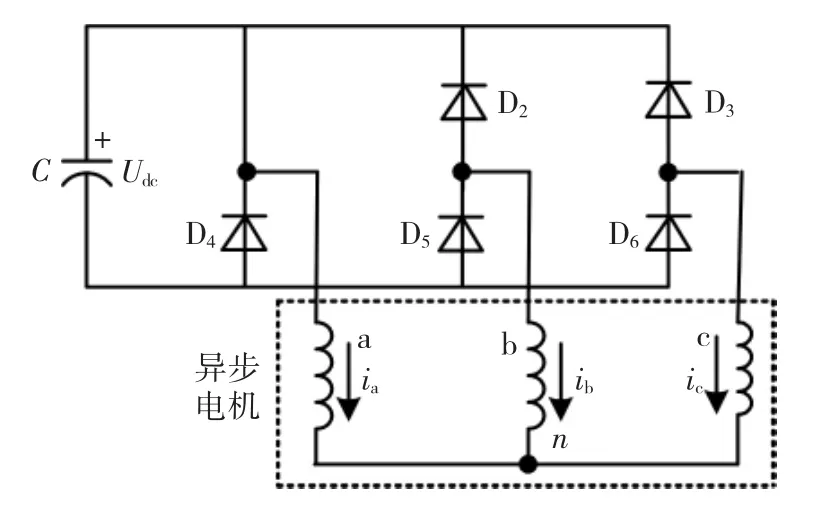
图7 T1开关短路(保护电路截止所有开关)时电路拓扑Fig.7 Circuit topology for T1short circuit while all other healthy switches are turned-off
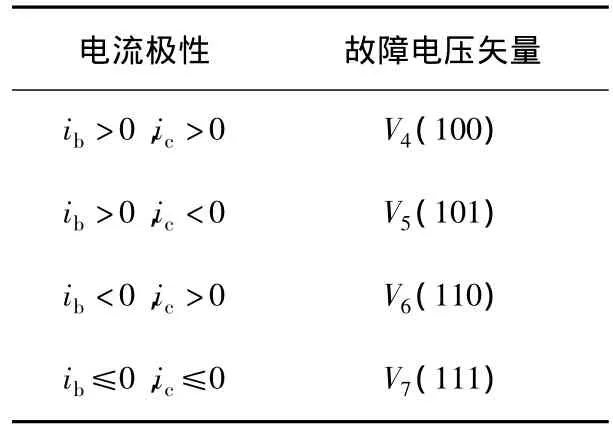
表3 T1短路(保护电路截止所有开关)的电压矢量Table 3 Voltage vectors at T1short circuit mode while all other healthy switches are turned-off
若ψs在扇区θ1中时发生T1短路故障,并由保护电路截止所有开关,此时的仿真波形如图8所示。短路开始时,ia>0,ib=0,ic<0,电机处于短路状态;ψs到了扇区 θ2中时,ia>0,ib<0,ic<0,b、c两相电流分别走D2和D3,电机依然处于短路状态,ψs到扇区 θ3中时,ia>0,ib<0,ic=0,电机还是处于短路状态,这样ψs一直按照式(11)衰减,转子磁链超前于定子磁链,转矩变为制动性质的,电流矢量幅值变大,但是变化幅度没有图5中大,电机的转速在缓慢下降。
若ψs在扇区θ2中时发生T1短路,并由保护电路截止所有开关,此时的仿真波形如图9所示。根据对电流极性的分析可知,电机的三相绕组也一直是处于短路状态的,ψs按照式(11)衰减,转矩与电流的变化有振荡,幅度比采用截止故障开关互补开关的保护方案要小,转速下降要慢。零,由于转子磁链的惯性使其超前于定子磁链,电机的转矩表现为制动性质的,但制动转矩的幅值、电机正常相的电流均小于截止互补开关的保护方案,电机转速下降也较缓慢。
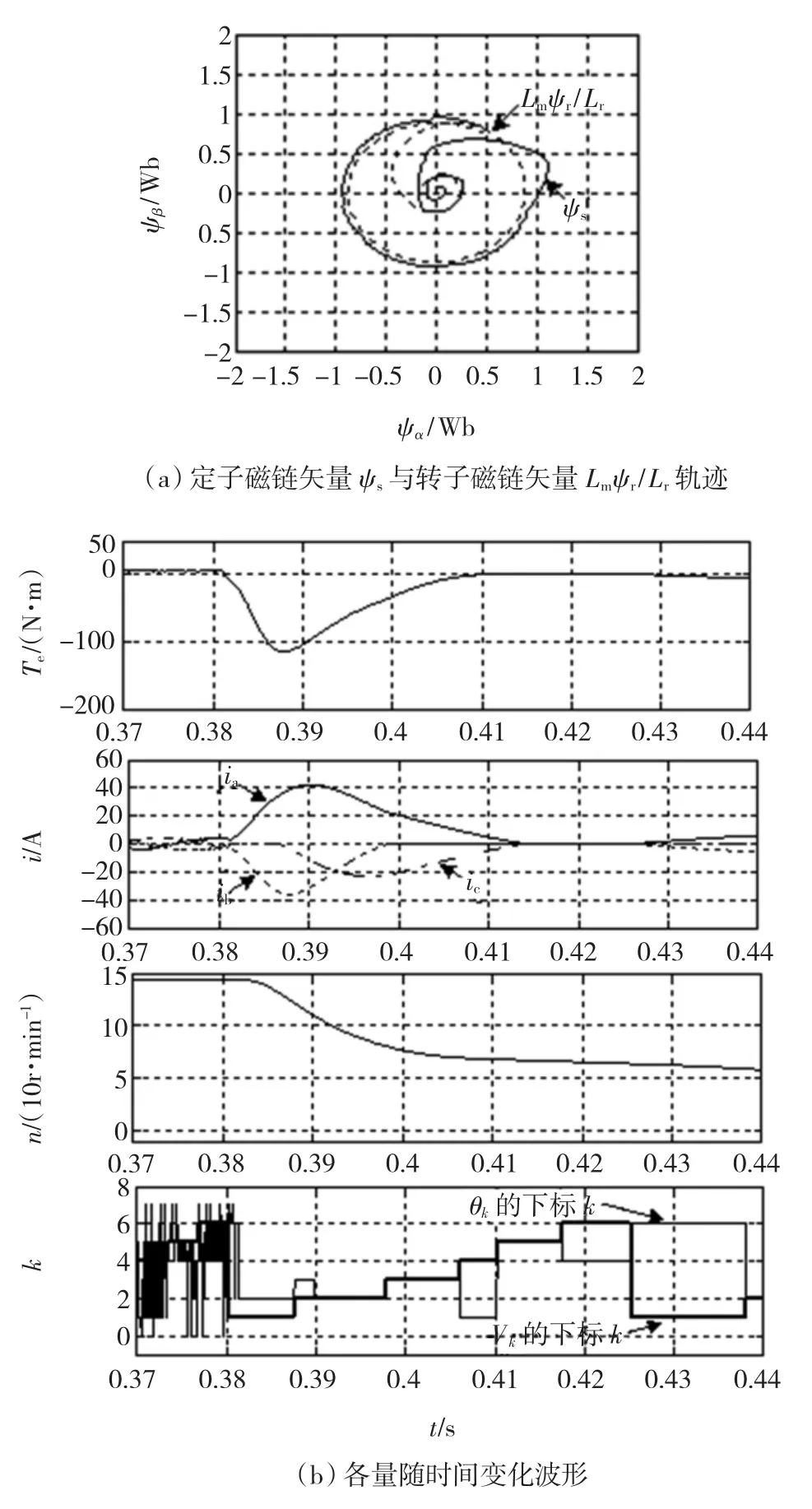
图8 T1短路(保护电路截止所有开关)的仿真波形(定子磁链在扇区θ1中发生短路,短路时刻t=0.381 s)Fig.8 Fault simulation waves of T1short circuit while all other switches are turned-off(When the fault happens,position of stator flux ψsis in θ1,t=0.381 s)
3.1.3 T1短路故障后两种保护方案工况比较
采用截止与故障开关互补开关的保护方案时,由于8种电压矢量中有4种可以选择,选择的矢量与实际应发矢量并不一定是同一个矢量,使定子磁链远远偏离所要控制的轨迹,引起电磁转矩与定子电流的大幅振荡,电机转速迅速下降,流过逆变器正常相的电流亦很大。
采用截止所有开关的保护方案时,矢量不能自由选择,只能由三相电流的续流决定,续流路径决定了电机绕组基本上是处于短路状态,因此无论ψs在哪个扇区时发生T1短路故障,定子磁链都将衰减为
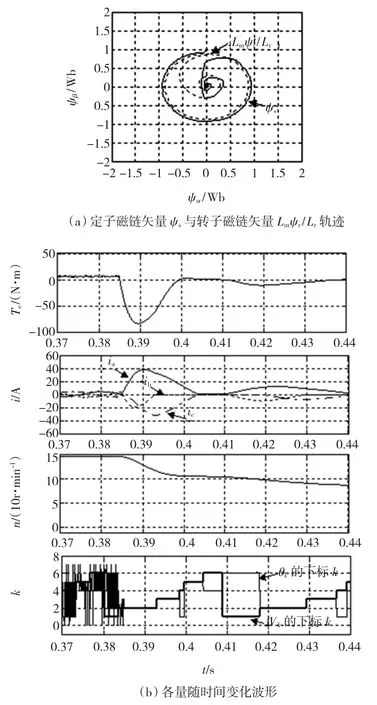
图9 T1短路(保护电路截止所有开关)的仿真波形(定子磁链在扇区θ2中发生短路,短路时刻t=0.385 s)Fig.9 Fault simulation waves of T1short circuit while all other switches are turned-off(When the fault happens,position of stator flux ψsis in θ2,t=0.385 s)
从对系统保护的效果来讲,T1短路时采用截止所有开关的保护方案优于采用截止故障开关互补开关的方案,即便如此,电流和转矩的最大冲击值仍然超过正常运行时额定值的10倍以上。
3.2 逆变器开关开路故障工况
当T1发生开路故障时,电路拓扑如图10所示,此时所能够获得的电压矢量取决于a相电流流向和T4的开关模式。
当ia<0时,ia的流通经过T4或D1,电动状态下T4为主要通路,D1为次要的续流通路,由于T4可以正常受控,D1续流通路随时可以满足,所以ia的流通不受影响,所需选择的电压矢量均可以获得;当ia>0时,ia的流通经过T1或D4,其中T1是主要通路,但因T1无驱动信号,尽管有D4做续流通路,ia依然没法正向增长,只能为零,a相绕组断开,此时a相尽管有感应电压产生,但对转矩已无影响,电压矢量为

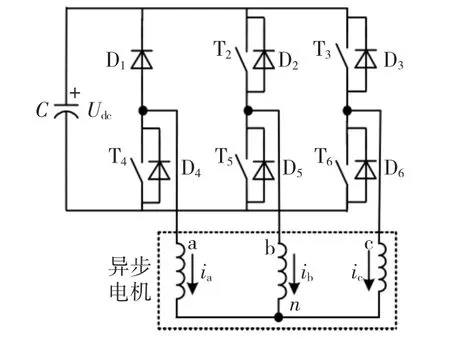
图10 T1开关开路时电路拓扑Fig.10 Circuit topology for T1open circuit
b、c两相的电压为

此时电压矢量只有4种,在α-β平面表示如图11所示。
电压矢量用b、c两相的开关状态表示为
图11 T1开路(ia变化趋势大于零时)的电压矢量
Fig.11 Voltage vectors for T1open circuit when the change direction of ia is bigger than 0
ψs初始位置在θ1扇区发生T1开路故障的仿真波形如图12所示,此时由于ia的变化趋势刚好大于零,只能发出如图11所示的矢量来代替V6(110)、V0(000)、V2(010)与V7(111),因此定子磁链落后于转子磁链,电磁转矩变为负的制动转矩,但制动转矩的幅值不大;当ψs转到扇区θ2时,ia<0,可以获得所需的电压矢量,磁链和转矩可以受控,电流依然三相对称;当 ψs转到扇区 θ5时,ia再次要大于零时,电压矢量再次变为图11中的4个矢量,转矩变为负的制动转矩,如此循环。

图12 T1开路的仿真波形(定子磁链在扇区θ1中发生开路,开路时刻t=0.38 s)Fig.12 Fault simulation waves of T1open circuit(When the fault happens,position of stator flux ψsis in θ1 ,t=0.38 s)
ψs在扇区θ2中时发生T1开路故障的仿真波形如图13所示,此时根据a相电流流向和T4的开关模式可以获得所需电压矢量,所以并未立即出现故障现象,而到了扇区θ5中,ia的变化趋势要大于零时(仿真时间t=0.395 s),转矩才变为负的制动转矩,出现脉动现象。
通过对ψs在多个位置的仿真可知,发生单个开关开路故障时,故障相的电流有半个周期一直为零,若是上管出现故障,则故障相电流只有负半周,原来的正半周故障后为零,若是下管出现故障,则故障相的电流只有正半周,原来的负半周故障后为零,系统仍然可以继续短时运行,不必停机。但是电磁转矩出现了大的低频脉动,并且有制动转矩出现,这从机械上对电机很不利。故障后正常的开关装置承受不相等的电流应力,且电流应力比正常运行时要大。由电磁转矩的波动带来电机转速的波动,这实际上会使电机产生新的电流谐波,逆变器的负载电流将增加。

图13 T1开路的仿真波形(定子磁链在扇区θ2中发生开路,开路时刻t=0.385 s)Fig.13 Fault simulation waves of T1open circuit(When the fault happens,position of stator flux ψsis in θ2,t=0.385 s)
4 结语
在发生功率开关短路的情况下,截止故障开关互补开关的保护方案由于选择的矢量与实际应发矢量不一致,引起电磁转矩与定子电流的大幅振荡,电机转速迅速下降;而截止所有开关的保护方案中电机绕组基本上是处于短路状态,在定子磁链衰减为零的过程中,电机的转矩和电流比截止故障开关互补开关的方案小许多,但最大值仍超过正常运行时额定值的10倍以上。短路故障后系统所采取的两种保护方案中,截止所有开关的保护方案较优。
在发生了功率开关开路故障时,故障相的电流只有半个周期,转矩有低频脉动,但系统仍然可以继续短时运行。
同一桥臂上的同一开关出现不同的故障,其电流与转矩波形差异很明显,根据这些不同的电流及转矩波形特征可以建立一故障诊断专家系统,并据此实现逆变器的故障检测、诊断与容错。本文的研究结果可为逆变器控制的其他各种电机控制系统的故障工况研究提供借鉴。
[1] WELCHKO B A,LIPO T A,JAHNS T M,et al.Fault tolerant three-phase AC motor drive topologies:a comparison of features,cost,and limitations[J].IEEE Transactions on Power Electronics,2004,19(4):1108 -1115.
[2] KASTHA D,BOSE B K.Investigation of fault modes of voltagefed inverter system for induction motor drive[J].IEEE Transactions on Industry Applications,1994,30(4):1028 -1038.
[3] CAMPOS-DELGADO D U,ESPINOZA-TREJO D R,PALACIOS E.Fault-tolerant control in variable speed drives:a survey[J].IET Electric Power Applications,2008,2(2):121-134.
[4] YEH Chiachou,DEMERDASH Nabeel A O.Induction motordrive systems with fault tolerant inverter-motor capabilities[C]//IEEE International Electric Machines and Drive Conference,May 3-5,2007,Antalya,Turkey.2007,2:1451-1453.
[5] DE ARAUJO RIBEIRO R L,JACOBINA C B,CABRAL DA SILVA E R,et a1.Fault-tolerant voltage-fed PWM inverter AC motor drive systems[J].IEEE Transactions on Industrial Electronics,2004,51(2):439 -446.
[6] MENDES André M S,MARQUES CARDOSO A J.Fault-tolerant operating strategies applied to three-phase induction-motor drives[J].IEEE Transactions on Industrial Electronics,2006,53(6):1807-1817.
[7] 张兰红,胡育文,黄文新.基于直接转矩控制技术的异步电机调速系统两种容错方案研究[J].南京航空航天大学学报,2005,37(1):34 -39.
ZHANG Lanhong,HU Yuwen,HUANG Wenxin.Two tolerant schemes for induction machine drive system based on DTC strategy[J].Journal of Nanjing University of Aeronautics & Astronautics,2005,37(1):34 -39.
[8] 张兰红,胡育文,黄文新.三相变频驱动系统中逆变器的故障诊断与容错技术[J].电工技术学报,2004,19(12):1 -9.
ZHANG Lanhong,HU Yuwen,HUANG Wenxin.Fault diagnosis and tolerant techniques of inverter in three-phase variable frequency drive system[J].Transactions of China Electrotechnical Society,2004,19(12):1 -9.
[9] 赵文祥,程明,朱孝勇,等.驱动用微特电机及其控制系统的可靠性技术研究综述[J].电工技术学报,2007,22(4):38-46.
ZHAO Wenxiang,CHENG Ming,ZHU Xiaoyong,et al.An overview of reliability of drive system for small andspecial electric machines[J].Transactions of China Electrotechnical Society,2007,22(4):38-46.
[10] 崔博文.逆变器供电的感应电机驱动系统故障仿真研究[J].电机与控制学报,2007,11(6):578-583.
CUI Bowen.Simulation study for inverter-fed motor drive system under fault conditions[J].Electric Machines and Control,2007,11(6):578-583.
[11] 孙丹,贺益康,何宗元.基于容错逆变器的永磁同步电机直接转矩控制[J].浙江大学学报:工学版,2007,41(7):1101-1106.
SUN Dan,HE Yikang,HE Zongyuan.Fault tolerant inverter based direct torque control for permanent magnet synchronous motor[J].Journal of Zhejiang University:Engineering Science,2007,41(7):1101-1106.
[12] 胡朝燕,周波,魏佳丹.双凸极电机全桥变换器单管开路故障在线诊断[J].中国电机工程学报,2009,29(33):111-116.
HU Chaoyan,ZHOU Bo,WEI Jiadan.On-line diagnosis of single transistor open-circuit fault infull-bridge converter of doubly salient electro-magnet motor[J].Proceedings of the CSEE,2009,29(33):111-116.
[13] 卢胜利,陈昊,昝小舒.开关磁阻电机功率变换器的故障诊断与容错策略[J].电工技术学报,2009,24(11):199 -206.
LU Shengli,CHEN Hao,ZAN Xiaoshu.Fault diagnosis and fault-tolerant control strategy for power converter of switched reluctance motor[J].Transactions of China Electrotechnical Society,2009,24(11):199 -206.
[14] MENDES André M S,MARQUES CARDOSO A J.Continuous operation performance of faulty induction motor drives[C]∥IEEE International Electric Machines and Drives Conference,June 1-4,2003,Madison,USA.2003,1:547-553.
(编辑:于双)
Investigation of inverter fault mode behavior for DTC induction motor drive system
ZHANG Lan-hong, LU Guang-ping, CHEN Chong
(School of Electrical Engineering,Yancheng Institute of Technology,Yancheng 224051,China)
In order to seek evidence for system reliability design,investigation of inverter fault mode behavior for direct torque control(DTC)induction motor drive system is done.Based on analysis of the principle about DTC,influence factors of operation behavior about the system were pointed out.Simulation investigation about power switch short circuit and open circuit,which are the most familiar fault modes of inverter,was implemented.Short circuit mode behavior refers to the situation when the system adopted two protect schemes,of which one is that the complementary switch of faulty switch is turned off,and another is that all other switches are turned off.Simulation results show that the system has an enormous impact on mechanism and electrical current at power switch short circuit mode,though the protect schemes were adopted.The scheme of turning off all switches is relatively optimal.The impact on mechanism and electrical current still exceeds ten times of rating value in this scheme.When power switch open circuit fault happens,the current has only half period,and the torque oscillates at low frequency;whereas the system can still run continuously in a little time.
direct torque control;induction machines;drive;inverter;fault
2010-10-16
江苏省自然科学基金(BK2009669);江苏省高校自然科学基础研究项目(08KJD470006)。作者简介:张兰红(1968—),女,博士,教授,研究方向为电机控制和电力电子技术;
陆广平(1974—),女,硕士,讲师,研究方向为计算机测控技术;
陈 冲(1982—),男,硕士,讲师,研究方向为电机控制和电力电子技术。
TM 346.2
A
1007-449X(2011)04-0058-09